Изобретение относится, к геофизике и сейсмсзяогия и может буть использовано при регястрйции упругих ксшебаНИИ
Цейъю изобретения Является расширение частотного диапазона регистрации сейс мйческих колебаний и собственной частоты сейсмоприемника в сторону инфранизких частот..
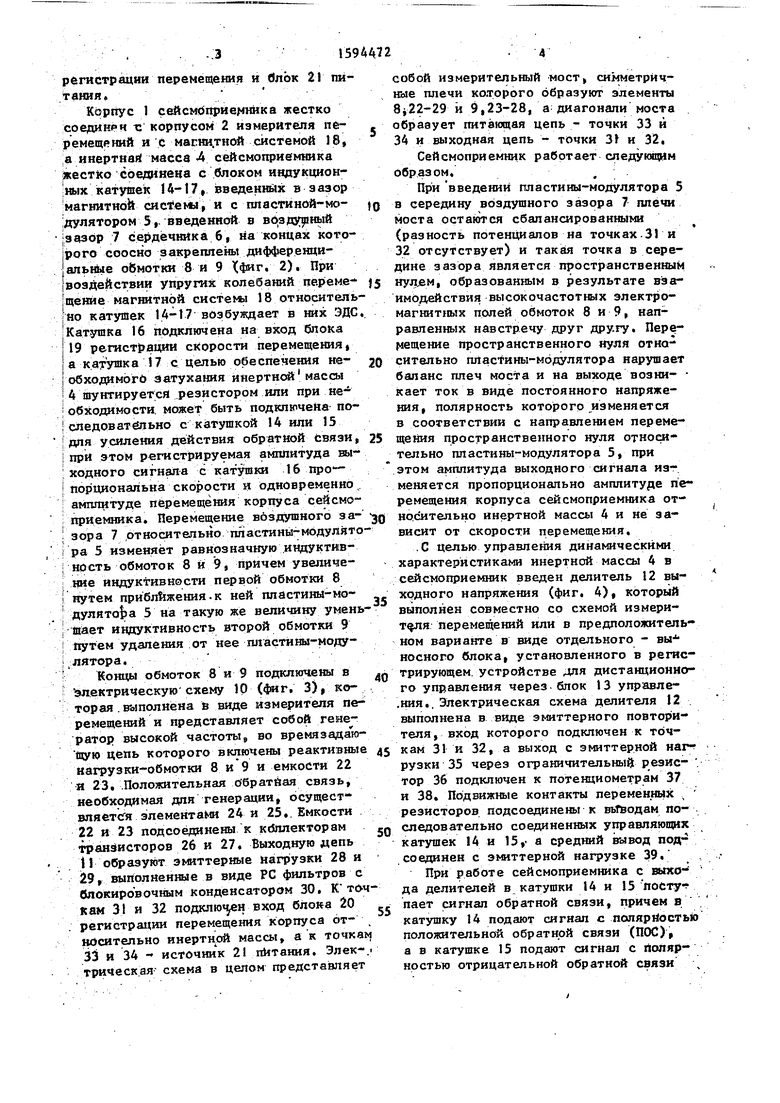
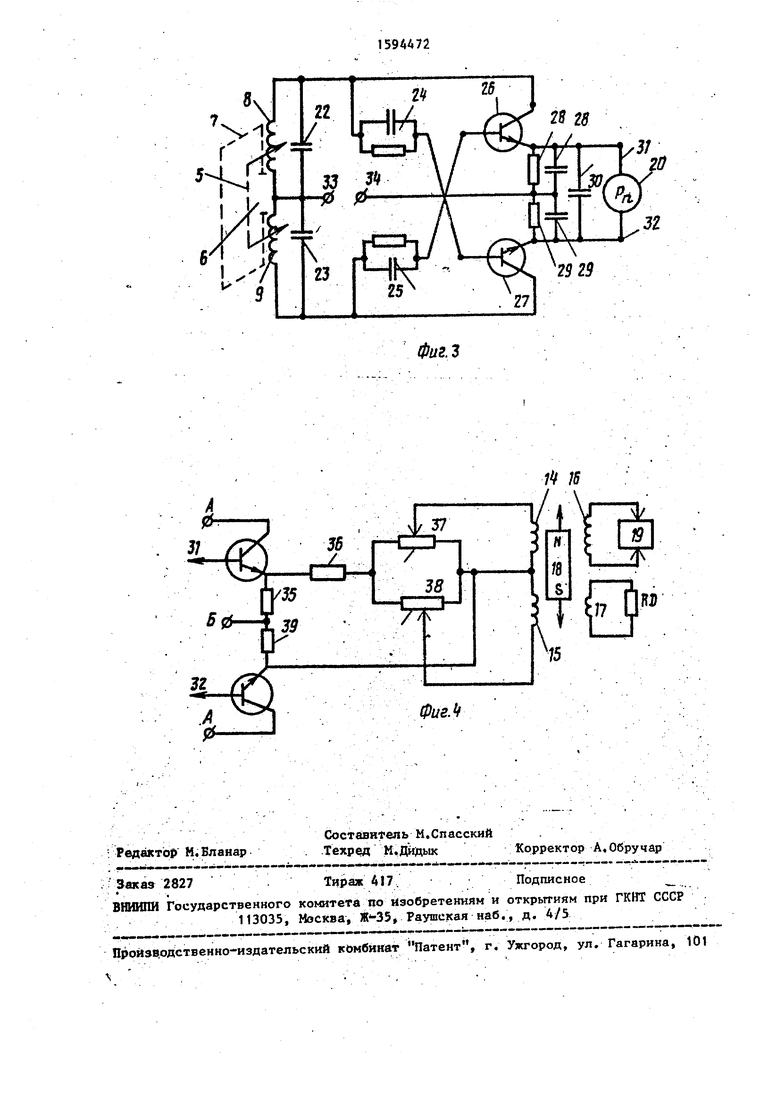
На фиг. I показана блок-схема предлагаемого сей смоприемник а; на 4й1г. 2 - индуктивный датчик с обмртками } на . фиг. 3 - принципиальная схема измери- теля перемещений; на, фиг. 4 - дегш- тель выходного напряжения.
Сейсмоприемник (ir, 1) содержит корпус I сей смоприемник а, корпус 2 измерителя перемещений, пружину 3, ннёртную массу 4, гшастину-модул ятор 5, сердечник 6 с воздушным зазором 7- и дифференциальными обмотками 9 : электрическую схему 10 генератора вы-- сокой частоты с выходной цепью .11 и . делителем 12 выходного напряжения, внешний блок 13 управлет1я, унравлй- клцие катушки 14 и 15, рабочую индук- ционную катушку 16, демпферную индукционную катушку 17, магнитную систему 18, внешний блок 19 регистрации, скорости перемещкиня, внешний блок 20
СП
(D { 41ik 41 1
регистрации neipвмещения и блок 21 пи- тания«
Корпус 1 сейсмййрИемника жестко соедини ч т: корпусом 2 измерителя пе- ремещений и С масни.тиой системой 18, а ииертнай масса 4 сейсмоприемника |жестко Соединена с блоком ИНДУкцион- :ных катушек 14-17, )введеннйх в зазор магнитной , и с пластиной-мо- ;дулятором 5,. введенной в вдздзпцшй зазор 7 сердечника 6, На концах кото- {рого соосно закреплены дифференци- апьйле обмотки 8 и 9 Хфиг. 2). При воздействии упругих колебаний переме щенИе магиитиой системл 18 относитель- 1ио катушек Ц-17 возбуждает в них ЭДС. IКатушка 16 подключена на вход блока I19 регистрации скорости перемещенияi I а катушка i 7 с целью обеспечения не- I обходимого затухания инертной масоэ 14 шунтируетсй резистором или при не- обходимости. может быть подключена по- i следовательно с катушкой 14 или 15 fдля усиления действия обратной Связи, 1 при этом регистрируемая амплитуда вы- ; ходного сигнала с катушки 16 про-- порциональна скорости и одновременно; I амплитуде перемещения коргсуса сейсмо- i приемника. Перемещение воздушного за- ; зора 7 относительно ппастины-модулято i ра 5 изменяет равнозначную индуктив- : ность обмоток 8 И 9, причем увеличе- ; ние индуктивнэсти первой обмотки 8 Гнутем приближения.к ней пластины-мо- ; дулятоЬа 5 на такую же величину умеиь тает индуктивность второй обмотки 9 путем удаления от нее пластИны-моду- лятора.
Концы обмоток 8 и 9 подключены в I зддактрическую схему 10 (фиг. 3), которая. выполнена в виде Измерителя перемещений и представляет собой генератор высокой частоты во вpeмязaJ aro- йогю цепь которого включены реактивные нагрузки-обмотки 8 и емкости 22 и 23, Положительная обратная связь, необходимая для генерации, осущест- вляетсгя злементами 24 и 25.. Емкости 22 и 23 подсоединены к кбллекторам транзисторов 26 и 27. Выходную «епь 11 образуют эмиттерные нагрузки 28 и i9, вынолненные в виде PC фильтров с блокировочным конденсатором 30, К токам 31 и 32 подклюх ен вход блока 20 регистрации перемещения корпуса от- восительно инертной массы, а к точка 33 и 34 - источник 21 пИтання. Электричеекая схема в целом предстаитяет
20
25
. Q J5 -30
JQ . .
35
40
45
собой измерительный мост, симметричные плечи которого образуют злементы 8 22-29 и 9,23-28, а диагонали моста образует питающая цепь - точки 33 и 34 и выходная цепь - точки 3 и 32,
Сейсмоприемник работает следуюпф1м образом,,
При введении пластины-модулятора 5 в середину воздушного зазора 7 плечи моста остаются сбалансированными (разность потенциалов на точках.ЗГ и 32 отсутствует) и точка в середине зазора является пространственным HyjijBM, образованным в результате взаимодействия высокочастотных злектро- магнитных полей обмоток 8 и 9, направленных навстречу друг другу, Пер нещение пространственного нуля относительно пластины-модулятора нарушает баланс плеч моста и на выходе возни- кает ток в виде постоянного напряжения, полярность которого .изменяется в соответствии с направлением перемещения пространственного нуля относительно пластины-модулятора 5, при этом амплитуда выходного сигнала изменяется пропорционально амплитуде перемещения корпуса сейсмоприемника относительно инертной массы 4 и не зависит от скорости перемещения,
.С целью управления динамическими характеристиками инертной массы 4 в сейсмоприемник введен делитель 12 выходного иапряжения (фиг, 4), который ВЕаполнен совместно со схемой измери- перемещений или в предположит ел ь иом варианте в виде отдельного - вы- носного блока, установленного в регистрирующем, устройстве для дистанциоиио- го управления через блок 13 управле- .ния.. Электрическая схема делителя 12 шлполнена в виде эмиттерного повторителя, вход которого подключен к точкам 31 и 32, а выход с змиттерной иаг рузки 35 через ограничительный резис- . тор 36 подключен к потенциометрам 37 и 38. Подвижные контакты переменных резисторов подсоединены к вьТводам последовательно соединенных управляющих катушек 14 и 13,- а средний вывод подсоединен с эмиттерной нагрузке 39,
При работе сейсмоприемника с выхо- да делителей в катушки 14 и 15 лостуч- лает сигнал обратной связи, причем в катушку 14 подают сигнал с полярностью положительной обратной связи (ПОС), а в катушке 15 подают сигнал с йоляр- ностью отрицательной обратной связи
5)5 9АА72
(рос)I при этом ПОС смещает инертную массу с нулевого положения путем вытал- кйвания пластины-модулятора 5 из точки пространствейного нуля в сторону к.обмоткам 8 и 9 и уменьшает кость подвесных пружин 3 инертной массы 4, что снижает собственную частоту инвр1тной массы А и расширяет диапазон регистрации в сторону более низких д частот, а ООС, йведениая в катушку 15, возвращает пластину-модулятор 5 в точку пространственного нуля, захватава- ет ее в этой точке и стабилизиру ет рабочее положение ийертной массы 4, Со- J5 отношение величины сигнала ПОС к сигналу ООС определяет параметры инертной массы сейсмоприемник а (собственную частоту и затухание),
С целью упрощения электрической 20 схеьш и ее настройки при максимальном КПД измерителя перемещений (фиг. 3) его выходная цепь выполнена в виде активных нагрузок 28 и 29 на RC-фильтрах, где переменная состав- 25 ляющая несущей частоты генератора . . фильтруется емкостями, подключенными параллельно резисторам, а постоянная составляющая, выделяемая на нагрузках 28 и 29 в виде постоянного напряжения, 30 поступает на точки 31 и 32, Амплитуда и знак полярности выходного напряжения зависит от амплитуды и направления перемещения корпуса сейсмоприемни- ка относительно инертной массы,35
С целью исключения взаимных влияний управляющих катушек 14 и 15 на выходной сигнал измерителя первмеще- -ЙИЙ к выходу измерителя (точки 31 и 32) подключен делитель выходного на- дО пряжения (фиг, 4), выполненный в виде дифференциального змиттерного повторителя,
С целью стабилизации выходного
сигнала измерителя перемещений в за- д зор 7 сердечника сведена пластина-модулятор, выполненная из латуни, которая при оптимальных размерах воздушного зазора 7, компенсирует неравно- мерную плотность высокочастотного нитного поля между торцакм сердечника, nytcM уменьшения индуктивности обмотки 8 или 9 - к которой он приближает- ся, ., .
с целью управления амплитудой выходного сигнала излерителя перемеще-:- НИИ без применения балластного дели- г теля в зазор сердечника вводят ппас- тину-модулятор, выполненную из феррита, которая увеличивает индуктивность той обмотки, к которой она приближается, при зтом амплитуда выходного сигнала изменяется пропорционально изменению напряжения источника питания,.
Формула изобретения
1. Сейсмоприемник, содержащий корпус с-размещенным в нем злектродинами ческим преобразователем с инертной массой в виде катушки, посредством диамагнитного ст ержня соединенной с измерителем перемещения, электрически связанным с блоком управления и источником питания, о тли ч а ю щ и й с п тем, что, с цепью расширения час- тотного диапазона регистрации сейсмических колебаний и собственной частоты сейсмоприемника в сторону инфра- низких частот, катушка злектродинами- ческого преобразователя дополнительно снабжена управляющими обмотками, измеритель перемещений выполнен в виде индуктивного преобразователя с воздушным зазором и включает пластину- модулятор, закреопенную на указанном диамагнитном стержне и Введенную в воэдушный зазор, при зтом выход яре- образователя через электронный блок управления соединен с управляющими обмотками электродинакического гфе- образователя,
2, Сейсмоприемник по п, 1, о т - личающийся тем, что индуктивный преобразователь выполнен в виде ферритового кольца с вырезом, на торцах которого соосно установлены пос- ледовательно соединенные контурны.е обмотки генератора высокой частоты, а выходная цепь индуктивного преобразователя выполнена в виде активных нагрузок, на ЯС- яльтрах, при зтом средние точки соединения указанных нагрузок и контурных обмоток генератора высокой частоты соединены с источником питания,,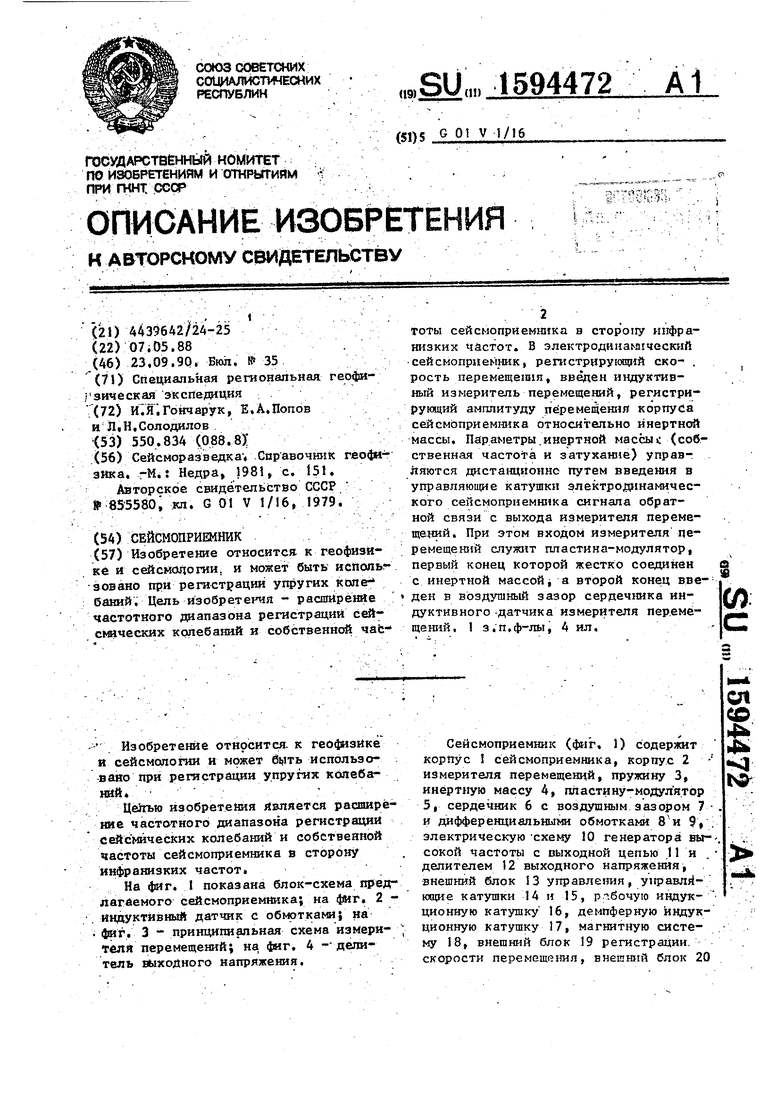
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ измерения магнитной индукции постоянных магнитов | 1989 |
|
SU1755227A1 |
| Устройство автоматического измерения параметров электродинамических сейсмоприемников | 1986 |
|
SU1327035A1 |
| Электродинамический преобразовательный блок сейсмоприемника ускорений | 1989 |
|
SU1720037A1 |
| Устройство для определения параметров сейсмоприемников | 1975 |
|
SU557342A1 |
| Способ калибровки сейсмических каналов с записью на промежуточный носитель | 1989 |
|
SU1755229A1 |
| Сейсмический вибродатчик | 1988 |
|
SU1608605A1 |
| Способ определения коэффициента преобразования электродинамического сейсмоприемника | 1985 |
|
SU1249603A1 |
| Способ определения частоты собственных колебаний электродинамического сейсмоприемника | 1986 |
|
SU1405000A1 |
| СЕЙСМОПРИЕМНИК УСКОРЕНИЙ | 1994 |
|
RU2098844C1 |
| Устройство для компенсации искажений электродинамического сейсмометра | 1990 |
|
SU1822995A1 |
Изобретение относится к геофизике и сейсмологии и может быть использовано при регистрации упругих колебаний. Цель изобретения - расширение частотного диапазона регистрации сейсмических колебаний и собственной частоты сейсмоприемника в сторону инфра низких частот. В электродинамический сейсмоприемник, регистрирующий скорость перемещения, введен индуктивный измеритель перемещений, регистрирующий амплитуду перемещения корпуса сейсмоприемника относительно инертной массы. Параметры инертной массы (собственная частота и затухание) управляются дистанционно путем введения в управляющие катушки электродинамического сейсмоприемника сигнала обратной связи с выхода измерителя перемещений. При этом входом измерителя перемещений служит пластина-модулятор, первый конец которой жестко соединен с инертной массой, а второй конец введен в воздушный зазор сердечника индуктивного датчика измерителя перемещений. 1 з.п. ф-лы, 4 ил.
Фие.2
фиг.З
Фиг.
| Сейсмор аз в едк а Спр авочки к геофи- зика | |||
| Приспособление для изготовления в грунте бетонных свай с употреблением обсадных труб | 1915 |
|
SU1981A1 |
| Двухколейная подвесная дорога | 1919 |
|
SU151A1 |
| Электродинамический сейсмоприемник | 1979 |
|
SU855580A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
