Недостатком системы является сложность оборудования в каждом канале полевой части и недостаточная ее надежность, обусловленная последовательным соединением сложных устройств, где функционирование каждого последующего устройства передачи данных зависит от безотказности-предыдущего.
Известна цифровая сейсмоприемная система для сухопутной сейсморазведки с более простым аппаратурным оборудованием в нолевой части, которая содержит линию передачи кодов, линию синхронизации, обе сплошные, но имеющие отводы по числу каналов, а в каждом канале - устройство кодирования еейомосигналов, состоящее из сейсмоприемника и аналого-цифрового преобразователя типа дельта-модулятора. Каждый преобразователь своим выходом связан с отводом линии передачи данных, а своим входом - с отводом линии сиихронизации. Цеитральиая станция содержит приемные сдвигающие регистры, устройство записи в виде процессора преобразования формата и фильтрации, стробирующего синхрогецератора, подключенного к линии синхронизации 2.
Однако известная система имеет недостаточную надежность передачи и приема кодов, обусловленную ограничительной зависимостью между устройством и параметрами обеих линий передачи, генератора сгробирующих импульсов и кодирующего преобразователя. Выполнение и связи этих признаков системы позволяют осуществить только одноразрядное кодирование приращения сейсмосигнала (дельта-модуляцию), а так как известная система относится к классу разомкнутых систем акустической телеметрии, то любой сбой или неточность преобразования -передачи и записи приводит к накоплению смещения и искажению кодированных сейсмосигналов, фиксируемых центральной станцией.
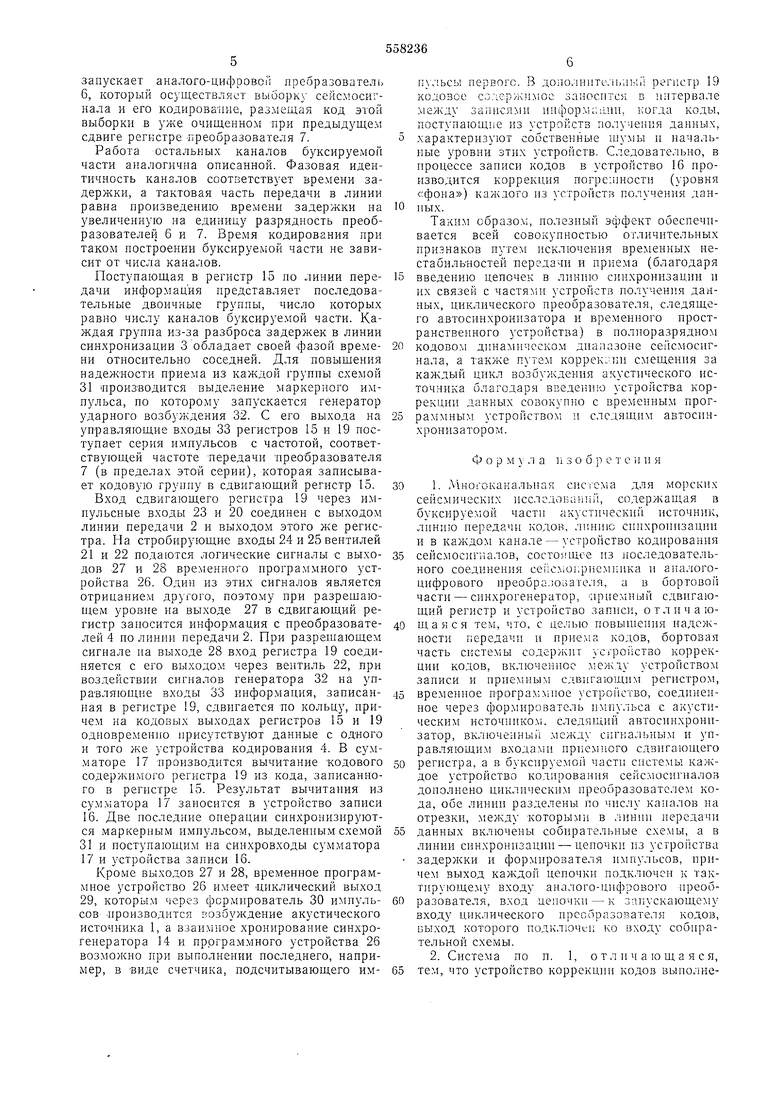
На чертел е представлена функциональная схема предлагаемой системы.
Система содержит в буксируемой части акустический источник 1, линию передачи кодов 2, линию синхронизации 3 (обе разделеиные по числу каналов на отрезки 2 и 3) и в каждом канале - устройство 4 кодирования сейсмосигиалов, состоящее из последовательного соединения сейсмоприемника 5 с аналого-цифровым преобразователем 6. Каждый сейсмоприемник 5 снабжен внутренним полосовым сейсмическим фильтром, а каждый прео азователь 6 - устройством формирования и запоминания выборки сейсмосигнала. Каждое устройство 4 подключено своим выходом к отрезкам 2 через циклический преобразователь кода 7 и собирательную схему 8, соединяющую, помимо этого, соседние отрезки 2. В линии 3 соседние отрезки 3 соединяются между собой через цепочки из устройства задержки 9 и формирователя 10 импульсов, причем выход каждой цепочки подключен к тактирующему входу 11 преобразователя 6,
а вход цепочки - к заиускаюилему входу 12 преобразователя 7.
Бортовая часть 13 системы содержит синхронизатор 14, Приемный сдвигающий регистр 15 и устройство записи 16, Между регистром 5 и устройством 1G включено устройство коррекции кодов, вьтолненное в виде сумматора поправок 17 с подключенным к его второму входу 18 блоком запоминания поправок в виде сдвигающего регистра 19, замкнутого в кольцо обратной связи через первый вход 20 двухтактного вентиля 21-22, второй импу.тьсный вход 23 которого подключен к линии передачи кодов, а стробирующие входы 24-25
вентиля - к дополнительному временному программному устройству 26, к его выходам 27-28. Длительность сигнала иа выходе 28 соответствует времени регистрации сейсмосигнала, на выходе 27 - времени накопления
информации о нулевой линии сейсмосигнала в каждом канале, а импульс иа выходе 29 - периоду возбуждения акустического источника 1 через формирователь 30 импульса. Кроме того, в бортовую часть введен следящий
автосинхронизатор, выполненный в виде иоследовательного соединения схемы выделения 31 маркерного импульса канала и импульсного геиератора ударного возбуждеиия 32. Автосинхронизатор включен между общим
управляющим входом 33 сдвигающих регистров 15 и 19 и сигнальным входом 34 регистра 15. Выход схемы 31 дополнительно подан для синхронизации устройств 16 и 17.
Система работает следующим образом.
Акустический источник 1 создает зондирующий сигнал, который после отражения донными и глубинными образованиями воспринимается, усиливается и отфильтровывается в сейсмической иолосе частот сейсмо приемниками 5. При запуске каждого преобразователя 6 по входу 11 формируется и запоминается на время дискретизации выборка сейсмосигнала, которая затем кодируется преобразователем 6 и заносится в регистр циклического преобразователя кодов 7.
Тактовый импульс с выхода синхрогенератора 14 БО линии 3 поступает на вход 12 преобразователя 7, нанример в каком-либо к-м канале системы. По этому сигналу в цреобразователе 7 происходит ретрансляция маркерного импульса увеличенной длительности, а затем хранящийся в регистре 7 код сейсмосигнала через собирательную схему 8 последовательно, разряд за разрядом, поступает в
линию передачи 2 и по вход бортового приемного сдвигающего регистра 15, при этом группы информациоипых двоичных посылок в линию 2 разделены маркерными импульсами и имеют по отношению к нему
сокращенную длительность.
Тактовый импульс цепочкой, состоящей из линии задержки 9 и формирователя 10, задерживается на время передачи в линию группы информациоиных посылок из преобразователя 7, а по тактирующему входу И
запускает аналого-цифровсй пребразователь 6, который осуществляет выборк сейсмосигнала и его кодирование, размещая код этой выборки в уже очищенном при предыдущем сдвиге регистре преобразователя 7.
Работа остальных каналов буксируемой части аналогична описанной. Фазовая идентичность каналов соответствует времени задержки, а т-актовая часть передачи в линии равна произведению времени задержки на увеличенную на единицу разрядность преобразователей 6 и 7. Время кодирования при таком построении буксируемой части не зависит от числа каналов.
Поступающая в регистр 15 по линии передачи информация представляет последовательные двоичные группы, число которых равно числу каналов буксируемой части. Каждая группа из-за разброса задержек в линии синхронизации 3 обладает своей фазой времени относительно соседней. Для повыщения надежности приема из каждой группы схемой 31 производится выделение маркерного импульса, по которому запускается генератор ударного возбуждения 32. С его выхода на управляющие входы 33 регистров 15 и 19 поступает серия импульсов с частотой, соответствующей частоте передачи преобразователя 7 (в пределах этой серии), которая записывает кодовую группу в сдвигающий регистр 15.
Вход сдвигающего регистра 19 через импульсные входы 23 и 20 соединен с выходом линии передачи 2 и выходом этого же регистра. На стробирующие входы 24 и 25 вентилей 21 и 22 подаются логические сигналы с выходов 27 и 28 временного программного устройства 26. Один из этих сигналов является отрицанием другого, поэтому при разрещаюпгем уровне на выходе 27 в сдвигающий регистр заносится информация с преобразователей 4 по линии передачи 2. При разрешающем сигнале на выходе 28 вход регистра 19 соединяется с его выходом через вентиль 22, при воздействии сигналов генератора 32 на управляющие входы 33 информация, записанная в регистре 19, сдвигается по кольцу, причем на кодовых выходах регистров 15 и 19 одновременно присутствуют данные с одного и того же устройства кодирования 4. В сум.маторе 17 производится вычитание кодового содержимого регистра 19 из кода, записанного в регистре 15. Результат вычитаиия из сумматора 17 заносится в устройство записи 16. Две иоследние операции синхронизируются маркерным импульсом, выделенным схемой 31 и поступающим на синхровходы сумматора Г/ и устройства записи 16.
Кроме выходов 27 и 28, временное программное устройство 26 имеет циклический выход 29, которым через формирователь 30 импульсов производится возбуждение акустического источника 1, а взаимное хронирование синхрогенератора 14 и программного устройства 26 возможно при выполнении последнего, например, в виде счетчика, подсчитывающего импу;;ьсы первого. В допо.чнительиьь регистр 19 кодовое со.че:рж 1мос заносится в интервале между записями информации, когда коды, поступающие из устройств получения данных, характеризуют собственные нлу.мы и начальные уровни этих устройств. Следовательно, в процессе записи кодов в устройство 16 ироизводится коррекция погрешности (уровня сфона) каждого из устройств получения данпых.
Таким образом, полезный эффект обеспечивается всей совокупностью отличительных признаков путем псключения временных нестабильностей передачи и приема (благодаря
введению цепочек в линию синхронизации и их связей с частями устройств получения данных, циклического преобразователя, следящего автосинхронизатора и временного пространственного устройства) в нолноразрядном
кодовом динамическом диапазоне сейсмоеигнала, а также путем коррекции смещения за каждый цикл возбуждеция акустического источника благодаря впедени устройства коррекции данных совокупно с времепным программным устройством и следящим автосинхронизатором.
Фор м л а п 3 о б р е т е и и я
1. Многоканальная система для морских сейсмических нселсдоБан п 1, содержащая в буксируемой части акустнческнй иеточн1 К, линию передачи кодов, линию синхронизации и в каждом канале - устройство кодирования
сейс.моспгналов, состоящее пз последовательного соединен я ceiic.ioi;piieMi iiKa и аналогоцифрового преобразователя, а в бортовой части - синхрогенератор, приемный сдвигающий регистр и устройство записи, отлпчающаяся тем, что, с целью повышепия надежности передачи и npne; ia кодов, бортовая часть системы содерж гг устройство коррекции кодов, включенное между устройством записи и приемным сдвигающим регистром,
временное программное устройство, соединенное через формирователь импульса с акустическим источником, следящий автосинхропизатор, включеины между спгнальпы. и управляющим входами нрпемного сдвигающего
регистра, а в буксируемой части системы каждое устройство кодирования сейсмоснгналов дополнено циклическим преобразователем кода, обе линии разделены по чпслу каналов на отрезки, между которыми в лннни передачи
данных включены собирательные схемы, а в
линии синхронизации - цепочки из устройства
задержки и формирователя импульсов, иричем выход кал-сдой цепочки подключен к тактпрующе.му входу аналого-цнфрового иреобразователя, вход цепочки - к запускающему входу циклического иреобразователя кодов, выход которого подключен ко зходу собирательной схемы. 2. Система по п. 1, о т л п ч а ю щ а я с я,
тем, что устройство коррекцпи кодов вынолнено в виде сумматора поправок с подключеппым к его второму -входу блоком затюмипання поправок в виде сдвигающего регистра, замкнутого в кольцо обратиой связи через иервый импульсный вход двухтактового вентиля, второй импульсный вход которого подключен к -выходу линии передачи кодов, а стробирующие входы вентиля - к выходам времениого программного устройства.
3. Система по пп. 1 и 2, отличающаяся тем, что следящий автосинхронизатор выполиен в виде последовательного соединения схемы выделения маркерного имиульса канала и импульсного генератора ударного возбуждения с управляющими входами сдвигающих регистров.
Источники информации, принятые во внимание при экспертизе:
1,Патент США Ai 3748638, кл. 340-15.5, 1973.
2.Патент США № 3851302, кл. 340-15.5, 1974 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Многоканальная система для морских сейсмических исследований | 1981 |
|
SU949587A2 |
| Устройство для морских геофизических исследований | 1983 |
|
SU1138774A1 |
| Цифровая приемная система для морских геофизических исследований | 1982 |
|
SU1078382A1 |
| Многоканальное цифровое устройство для морских сейсмических исследований | 1980 |
|
SU972431A1 |
| Цифровая телеметрическая система для морских сейсмических исследований | 1982 |
|
SU1037317A1 |
| ТЕЛЕМЕТРИЧЕСКАЯ СЕЙСМОРЕГИСТРИРУЮЩАЯ СИСТЕМА ДЛЯ МОРСКИХ ИССЛЕДОВАНИЙ | 2021 |
|
RU2781800C1 |
| Устройство для регистрации сейсмической информации в цифровом виде на акваториях | 1986 |
|
SU1385113A1 |
| Морская цифровая сейсморегистрирующая станция | 1987 |
|
SU1427315A1 |
| Цифровая система измерения глубинного положения морской пьезосейсмографной косы | 1976 |
|
SU894640A1 |
| ДЕШИФРАТОР ИМПУЛЬСНЫХ ПОСЛЕДОВАТЕЛЬНОСТЕЙ | 1991 |
|
RU2089045C1 |
