ность и момент снятия которых определяют моментом смены знака суммарного сигнала.
Таким образом, при управлении по предлагаемому способу управляющее воздействие представляет собой последовательность прямоугольных импульсов, величина которых определяется величиной исходного возмущения (по способу, изложенному в прототипе), а длительность (моменты переключения) определяется знаком (сменой знака) суммы нараметров переходного процесса.
Эффективность предлагаемого способа по сравнению с прототипом обусловлена следующими факторами.
Известный способ включает в себя формирование однократного управляющего воздействия на разгрузку без использования информации о характере переходного процесса, предъявляя при этом очень высокие требования к точности измерения возмущения и дозировки управляющего воздействия. В условиях реальной аппаратуры он может оказаться неэффективным, так как однократное управляющее воздействие при наличии погрешностей измерения и дозировки в целом ряде случаев не обеспечивает сохранения устойчивости. Предложенный же способ и в этих условиях обеспечивает характер изменения мощности станции, необходимый для сохранения устойчивости. Кроме того, предлагаемый способ обеспечивает надежное (по изменению параметров режима) определение моментов переключения импульсов, что позволяет предотвратить глубокое переторможение передающей станции вследствие длительиого снижения мощности турбины, а следовательно, и повысить эффективность аварийной разгрузки.
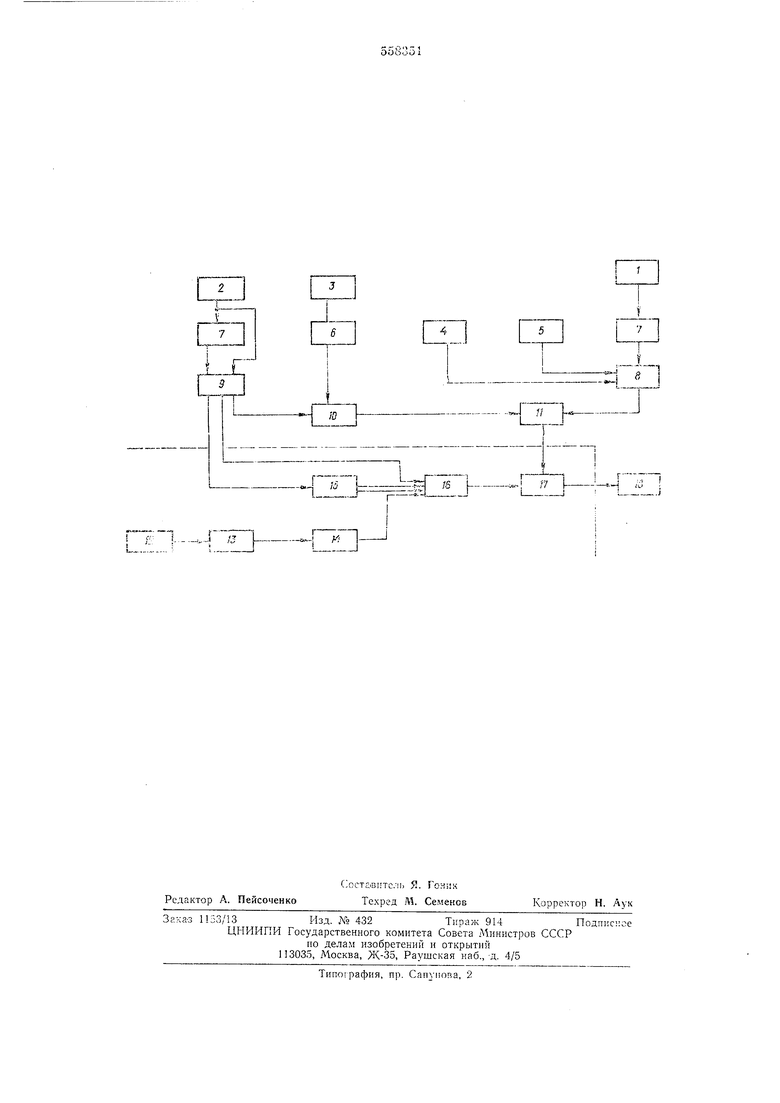
На чертеже дана блок-схема, реализующая описываемый способ (для случая один генераторный блок и одна линия), где 1 - преобразователь активной мощности, устанавливаемый на линии связи с приемными системами,
2- преобразователь активной мощности, устанавливаемый на генераторных блоках,
3- датчик тока нулевой или обратной последовательности, фиксирующий короткое замыкание, 4 - блок обработки телеинформации, выявляющий отключение участков на электропередачах, 5 - информационный блок, контролирующий положение выключателей связи между секциями шин станции, 6 - логикоарифметическое устройство, определяющее длительность короткого замыкания, 7 - оперативное запоминающее устройство, запоминающее величины мощностей в доаварийном режиме, 8 - логико-арифметическое устройство, осуществляющее выбор уставок в зависимости от места аварии и схемы электропередачи, 9 - арифметическое устройство, выделяющее сбросы мощности на генераторных блоках, 10 - логико-арифметическое устройство, производящее по начальным аварийным
сбросам мощностей на генераторных блоках оценку суммы кинетических энергий относительного движения генераторов станции к концу заданного времени короткого замыкания, 11 - блок определения величины аварийной разгрузки станции, 12 - датчик скорости вращения ротора генератора, 13 - арифметическое устройство, вычисляющее скольжение ротора генератора, 14 - блок дифференцирования, вычисляющий ускорение ротора генератора, 15 - блок дифференцирования, вычисляющий первую производную отклонения активной мощности генератора от ее значения в доаварийном режиме, 16 -сумматор - определитель знака, 17 - логико-арифметическое устройство, формирующее аварийное управляющее воздействие на исполнительные органы 18.
Согласно предложенному способу сигнал с выхода блока 12, пропорциональный скорости вращения ротора, подают на вход блока 13, где сравнивают с опорным сигналом, соответствующим синхронной скорости. Затем сигналы с выходов блоков 13 и 9 дифференцируют соответственно в блоках 14 и 15. Сигналы с выходов блоков 9, 13, 14 и 15 подают в блок 16, где их суммируют и определяют знак суммарного сигнала. Суммарный сигнал с выхода блока 16 подают в блок 17, где ограничивают по амплитуде в соответствии с сигналом, поступающим на вход блока 17 с выхода блока 11. Выходной сигнал блока 17 поступает на исполнительные органы 18 аварийной разгрузки станции.
Таким образом, на выходе блока 17 в течение всего времени переходного процесса формируется управляющее воздействие в виде последовательности прямоугольных импульсов, моменты переключения и длительности которых определяются знаком суммы параметров переходного процесса.
Формула изобретения
Способ повышения динамической устойчивости нри параллельной работе мощных электростанций по авт. св. N° 312341, отличающий с я тем, что, с целью повышения эффективности аварийного управления разгрузкой станции, в течение всего времени переходного процесса для каждого генераторного блока выделяют сигналы, пропорциональные скольжению и отклонению активной мощности, дифференцируют их, суммируют указанные сигналы и их первые производные, ограничивают суммарный сигнал до значения, соответствующего необходимой величине разгрузки электрической станции, и этим суммарным сигналом управляют исполнительными органами аварийной разгрузки станции в виде последовательности прямоугольных импульсов, длительность и момент снятия которых определяют моментом смены знака суммарного сигнала.
±J
ti
1 Г
cz
Ш
Ф
E
h
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для аварийного управления активной мощностью электростанций | 1977 |
|
SU687529A1 |
| О.ОЗНЛЯ [г:т:нтно-инуг:1::нАе:ПИБЛ^ | 1971 |
|
SU312341A1 |
| Способ повышения динамической устойчивости сложной энергосистемы | 1976 |
|
SU652649A1 |
| Устройство для аварийного управления активной мощностью электростанций | 1981 |
|
SU983891A1 |
| Устройство для аварийного управления активной мощностью электростанции | 1990 |
|
SU1718329A2 |
| Способ обеспечения статической устойчивости при аварийном ослаблении связи электростанции с энергосистемой | 1982 |
|
SU1050038A1 |
| Устройство для аварийного управления активной мощностью электростанции | 1978 |
|
SU792482A1 |
| Устройство для экстренной разгрузки линии электропередачи при аварийном снижении предела передаваемой мощности | 1982 |
|
SU1083286A1 |
| Способ противоаварийного управления мощностью турбин | 1980 |
|
SU868918A1 |
| Устройство противоаварийной режимной автоматики электростанции | 1974 |
|
SU748656A1 |
-i -
IbJ-
iJ-Ч...1 /J
I
-H
,5 ......
