Изобретение относится к электроэнергетике, а именно к противоаварийной автоматике электроэнергетических систем и предназначено для повьаиения надежности и предотвращения нарушения устойчивости параллельной работы станции и энергосистем в случае возникновения повреждений в энергосистеме.
Известны устройства протввоава рийной автоматики, содержащие пусковые органы, исполнительные органы и блок расчета дозировки управляющих воздействий, определяемых по параметрам доаварийного режима и пояа Baei«ix на исполнительные органы для предотвращения нарушения устойчивости параллельной работы энергосистем (1 и 2.
Однако в этих устройствах расчет дозировки (определение интенсивносги) управляющего воздействия для йсех фиксируе№1Х повреждений осуществляется в доаварийном режиме на основании предварительно проведенных расчетов устойчивости, что предъявляет очень высокие требования к точности измерения возмущающего воздействия и дозировки импульса. В реальньпе условиях это значительно
-снижает эффективность и надежность аварийного управляющего воздействия. Применительно к аварийной разгрузке станции эта проблема усугубляется нестабильностью динамических характеристик систем регулирования паровых турбин, являющихся в этом случае объектом воздействия.
Наиболее-близким по технической сущности к йэосретеиию является устройство для аварийного управления активной мощностью электростанций, coяepжaвдees датчик скорости вращения генерат€« а выход которого включен
5 на вход арифметического блока выделения скольжения, дифференциатор, вход которого подключен к выходу арифметического блока выделения скольжения, сумматор-определитель
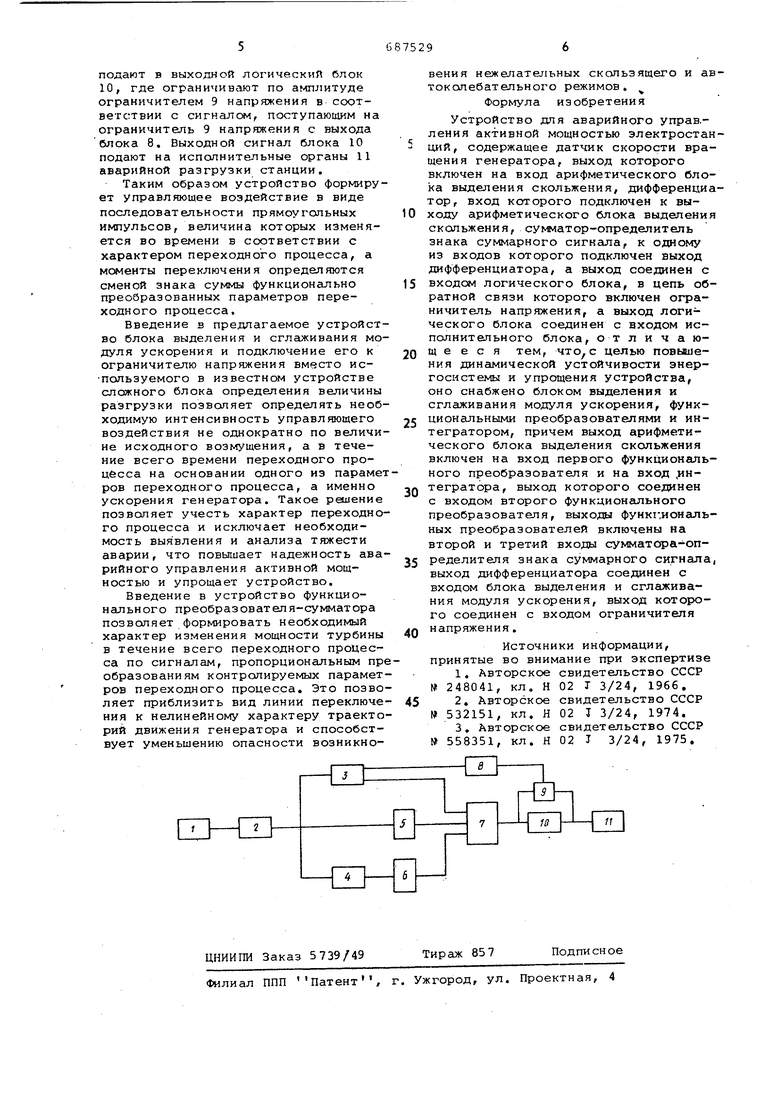
0 знака суммарного сигнала, к одному из входов которого подключен выход дифференциатора, а выход соединен с входом логического блока, в цепь обратной связи которого включен огра5ничитель налряжения, а выход логического блока соединен с входе исполнительного блока. Ограничитель напряжения соединен с выходом блока определения величины аварийной раз0грузки станции 3. В блоке определения величины аварийной разгрузки производят выявление аварийной ситуации и оценку необходимой величины управляющего воздействия в зависимости от величины исходного возмущения и ава рийного изменения электропередачи . Таким образом известное устройство формирует управляющее воздействие в виде последовательности прямоугольных импульсов неизменной в течение переходного процесса ам11ЛИТУДЫ, зависящей от величины исходного возмущения, и переменной длительности, определяемой сменой знака суммы параметров переходного процесса. Однако такой подход к -дознровкв управляющего воздействия не учитывает характера переходного прсадесса, требует в составе блока определения величины аварийной разгрузки дополнительных логических элементов для подачи и снятия управляющего воздействия, что значительно снижает надеж ность и быстродействие устройства, Низкое быстродействие устройства требует увеличения интенсивности управляющих воздействий, что приводит к увеличению ущерба в энергообъединении. Кроме того, в известном устройстве необходимых характер изменения мощности турбины определяется по сигналам, пропорциональным параметрам переходного процесса,. Это прнвод} т К тому, что моменты переклю чения управляющего воздействия определяются линией, имелощей вид прямой Те.м самым учитывается нелинейный характер траекторий движения генератора, что создает опасность возникнове ния нежелательных скользящего, (в окрестностях установившегося режима) и автоколебательного (при больших отклонениях параметров) режимов. Цель изобретения - увеличение эффективности и надежности аварийного управления активной мощностью электростанций для повышения динамической устойчивости энергосистем, а также упрощение устройства. Это достигается тем, что устройст во для аварийного управления активной мощностью электростанции, содержащее датчик скорости вращения генератора, выход которого включен на вход арифметического блока выделения скольжения, дифференциатор, вход которого подключен к выходу арифметического блока выделения скольжения, сумматор-определитель знака суммарного сигнапа, к одному из входов . которого подключен выход дифференци тора, а выход соединен с входом логического блока, в цепь обратной связи которого включен ограничитель напряжения, а выход логического блока соединен с входом испопнительного блока, снабжено блоком вьщеления и сглсхживания модуля ускорения, функционеитьными преобразователями и интегратором, причем выход арифметического блока выделения скольжения включен на вход первого функциональ-. ного преобразователя и на вход интегратора, выход которого соединен с входом второго функционального преобразователя, выходы функциональных преобразователей включены на второй и третий входы суииатора-определителя знака сукмарного сигнала, выход дифференциатора соединен с входом блока выделения и сглаживания модуля ускорения, выход которого соединен с входом ограничителя напряжения, На чертеже дана структурная схеf4a устройства, В нем датчик скорости 1 подключен на вход арифметического блока 2, с выходом которого связаны входы дифференциатора 3, интегратора 4 и функционального преобразователя 5. С выходом интегратора 4 соединен вход функционального преобразователя б, выход которого наряду с выходами дифференциатора 3 и функционального преобразователя 5 подключен к входам сумматора-определителя 7 знака. Второй выход дифференциатора 3 связан с входом блока 8 выделения и сглаживания модуля ускорения, выход которого соединен с ограничителем 9 напряжения. Ограничитель 9 напряжений включен в обратную связь выходного логического блока 10,вход которого соеданен с выходом сумматора-определителя 7 знака, а выход с исполнительными органами 11 аварийной разгрузки станции, Работа устройства осуществляется следующим образом. При возникновении аварийного возмущения сигнал с выхода дифференциатора 3, пропорциональный ускорению ротора генератора, подают в блок 8, где выделяют его модуль и производят сглаживание на интервале знакопос.тоянства ускорения. Одновременно выходной сигнал арифметического блока 2, пропорциональный скольжению, интегрируют в интеграторе 4, получая сигнал, пропорциональный отклонению угла вектора ЭДС генератора в переходном процессе. Выходные сигналы 2 и 4, пропорциональные параметрам переходного процесса, преобразовывают в функциональных преобразователях соответственно 5 и 6 в соответствии с заданным видом линии переключения управляющего воздействия. Выходные сигналы преобразователей 5 и 6 и дифференциатора 3 суммируют в сумматоре-определителе 7 знака. Суммарный сигнал с выхода блока 7
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для аварийного управления активной мощностью электростанции | 1978 |
|
SU792482A1 |
| Устройство для аварийного управления активной мощностью электростанций | 1981 |
|
SU983891A1 |
| Устройство для аварийного управления активной мощностью электростанции | 1990 |
|
SU1718329A2 |
| Устройство для аварийного управления активной мощностью электростанции | 1978 |
|
SU788269A2 |
| Устройство для аварийного управления активной мощностью электростанции | 1980 |
|
SU953691A2 |
| Устройство для экстренной разгрузки линии электропередачи при аварийном снижении предела передаваемой мощности | 1982 |
|
SU1083286A1 |
| Способ противоаварийного управления мощностью турбин | 1980 |
|
SU868918A1 |
| Способ повышения динамической устойчивости при параллельной работе мощных электростанций | 1975 |
|
SU558351A2 |
| Регулятор-ограничитель мощности турбоагрегата | 1984 |
|
SU1231559A1 |
| Устройство для аварийного ограничения мощности электростанции | 1983 |
|
SU1149349A1 |
