Изобретение относится к радиотехнике и может использоваться в ультразвуковой локации.
Известен скважинный гидролокатор, содержапдий последовательно соединенные приемо-передающий блок с калибратором и датчиком азимута, блок управления и запоминающее устройство, а также генератор частоты и регистратор, причем выход генератора частоты соединен с одним из входов запоминающего устройства 1.
Однако известный гидролокатор имеет низкую точность измерения.
Цель изобретения - повыщение точности измерения расстояния.
Для этого скважинный гидролокатор, содержащий последовательно соединенные приемо-передающий блок с калибратором и датчиком азимута, блок управления и запоминающее устройство, а также генер-атор частоты и регистратор, причем выход генератора частоты соединен с одним из входов запоминающего устройства, дополнительно содержит регулируемый цифровой преобразователь частоты с устройством изменения масщтаба регистрации, а также последовательно соединенные счетчик импульсов и преобразователь код-напряжение, выходы которых соединены с регистрaTopOiM, соответствующие входы регулируемого цифрового преобразователя частоты соединены с выходом генератора частоты, выходом запоминающего устройства и первым выходом блока управления, второй выход которого соединен с вторым входом
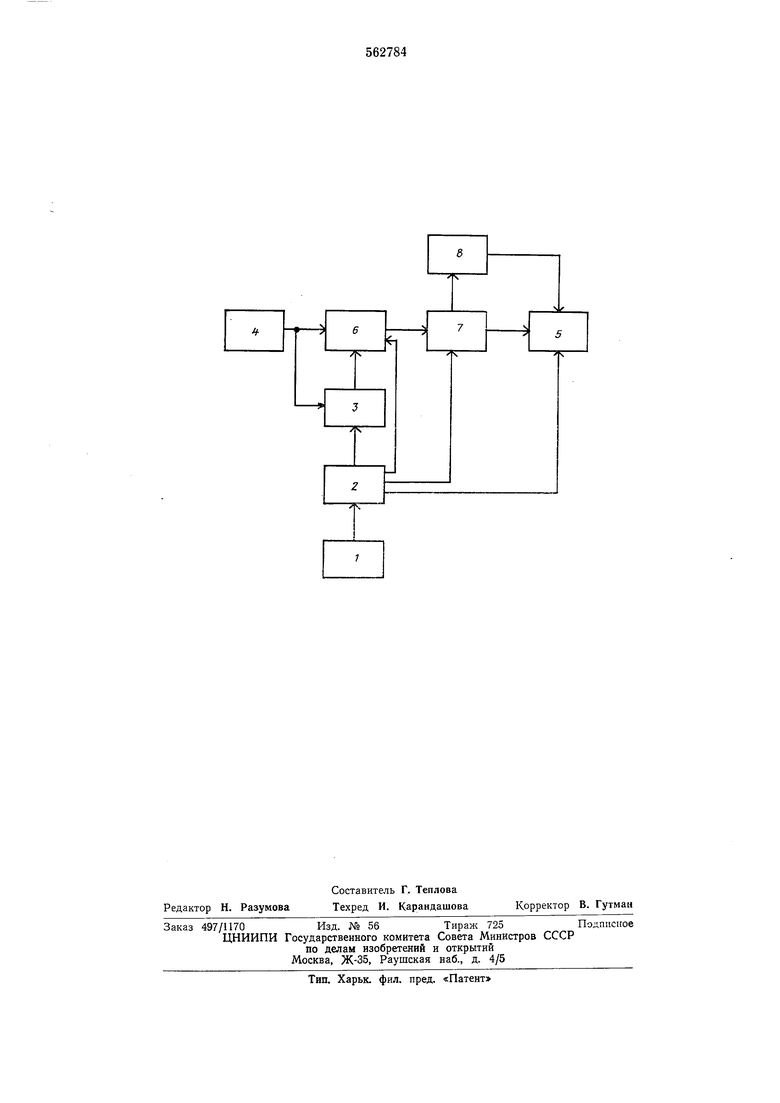
счетчика импульсов, а третий выход - с регистратором, при этом выход регулируемого цифрового преобразователя частоты соединен с первым входом счетчика импульсов. На чертеже приведена структурная электрическая схема предложенного гидролокатора.
Скважинный гидролокатор содержит приемо-передающий блок 1 с калибратором и датчиком азимута, блок 2 управления, запоминающее устройство 3, генератор 4 частоты и регистратор 5, причем выход генератора 4 соединен с одним из входов запоминающего устройства 3. Гидролокатор также содержит регулируемый цифровой преобразователь 6 частоты с устройством изменения масщтаба регистрации, последовательно соединенные счетчик 7 импульсов и преобразователь 8 код-напряжение, выходы которых соединены с регистратором 5, соответствующие входы
регулируемого цифрового преобразователя 6 соединены с выходом генератора 4, выходом запоминающего устройства 3 и первым выходом блока 2 управления, второй выход которого соединен с вторым входом счетчика 7, а
третий выход - с регистратором 5, при этом
выход регулируемого цифрового преобразователя 6 соединен с первым входом счетчика 7.
Гидролокатор работает следующим образом.
Импульсы интервала времени локации калибровочной базы поступают из приемо-передающего блока / в блок 2 управления, а из него - на запоминающее устройство 3, которое осуществляет счет импульсов генератора 4 в продолжении интервала времени локации калибровочной базы. По окончании счета на выходе запоминающего устройства 5 имеется код числа интервала времени локации калибровочной базы. Упомянутый код устанавливает регулируемому цифровому преобразователю 6 неОбходимый коэффициент преобразования. В момент времени, соответствующий началу измерения дальности до лоцируемого объекта, импульс момента излучения поступает из приемо-передающего блока 1 в блок 2 управления и далее на регулируемый цифровой преобразователь 6, разрещая ему начать операцию преобразования частоты, поступающей от генератора 4. Значение периода следования импульсов с выхода цифрового преобразователя 6 однозначно определено интервалом времени локации калибровочной базы и избранным масштабом регистрации. Это означает, что временной интервал измерения дальности до лоцируемого объекта линейно масштабирован выходной последовательностью импульсов цифрового преобразователя 6 и позволяет присвоить временному местоположению каждого импульса этой последовательности соответствующее значение дальности в единицах длины при любом значении скорости распространения звука в среде.
Напряжение развертки с выхода преобразователя 8 поступает на регистратор 5, выполняющий развертку в соответствии с полученными сигналами. Марки времени с второго выхода счетчика 7 поступают на регистратор 5. Значение скорости развертки на регистраторе 5 и период марок времени на развертке однозначно взаимосвязаны. Импульсы, соответствующие эхо-сигналам лоцируемого объекта, а также импульсы азимутальной ориентации поступают из приемо-передающего блока 1 в блок 2 управления и далее в регистратор 5, где происходит их отображение. При этом местоположение импульсов эхо-сигналов на экране регистратора 5 определяется удаленностью лоцируемого объекта, выбранным
масщтабом регистрации и не зависит от скорости распространения звука в среде. Изменение масщтаба регистрации выполняется спомощью устройства изменения масштаба регистрации, входящего в регулируемый цифровой преобразователь 6 путем установки масщтабного коэффициента регистрации.
На регистраторе 5 фиксируется форма, пространственное положение и размеры обмеряемого сечения в заданном масштабе и стандартных единицах длины. Масштаб регистрации не зависит от измерения скорости распространения звука в среде. Предложенный гидролокатор характеризуется высокой точностью измерения, сохраняющейся во времени неизменной, в том числе, при воздействии климатических факторов. Он обладает высокой надежностью и быстродействием, технологичен в изготовлении, несложен в настройке и эксплуатации.
Формула изобретения
Скважинный Гидролокатор, содержащий последовательно соединенные приемо-передающий блок с калибратором и датчиком азимута, блок управления и запоминающее устройство, а также генератор частоты и регистратор, причем выход генератора частоты соединен с одним из входов запоминающего устройства, отличающийся тем, что, с целью повыщения точности измерения расстояния, он дополнительно содержит регулируемый цифровой преобразователь частоты с устройством измерения масштаба регистрации, а также последовательно соединенные счетчик импульсов и преобразователь код-напряжение, выходы которых соединены с регистр атором, соответствующие входы регулируемого цифрового преобразователя частоты соединены с выходом reHepaTOipa частоты, выходом запоминающего устройства и первым выходом блока управления, второй выход которого соединен с вторым входом счетчика импульсов, а третий выход - с регистратором, при этом выход регулируемого цифрового преобразователя частоты соединен с первым входом счетчика импульсов.
Источник информации, принятый во вни. мание при экспертизе изобретения;
1. Авторское свидетельство СССР Л 317782, кл. Е 21 В 47/00, 1969.
| название | год | авторы | номер документа |
|---|---|---|---|
| СКВАЖИННЫЙ ГИДРОЛОКАТОР | 1971 |
|
SU317782A1 |
| Скважинный гидролокатор | 1978 |
|
SU928284A1 |
| Скважинный гидролокатор | 1990 |
|
SU1796014A3 |
| Устройство для подземного акустического исследования | 1975 |
|
SU584269A1 |
| АКУСТИКО-ЭМИССИОННЫЙ СПОСОБ ДИАГНОСТИРОВАНИЯ ИЗДЕЛИЙ ИЗ КОМПОЗИЦИОННЫХ МАТЕРИАЛОВ НА ОСНОВЕ УГЛЕПЛАСТИКА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2015 |
|
RU2599327C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ДИСТАНЦИЙ ДО КРОМОК СУДОХОДНОЙ ПОЛОСЫ И ОБНАРУЖЕНИЯ ПРЕПЯТСТВИЙ НА НЕЙ | 1991 |
|
RU2006874C1 |
| ВОЛОКОННО-ОПТИЧЕСКОЕ УСТРОЙСТВО ДЛЯ ПЕРЕДАЧИ И РЕГИСТРАЦИИ ОДИНОЧНЫХ ЭЛЕКТРИЧЕСКИХ ИМПУЛЬСОВ СУБНАНО-ПИКОСЕКУНДНОГО ДИАПАЗОНА | 2007 |
|
RU2348111C1 |
| Ультразвуковое сканирующее и фокусирующее устройство | 1984 |
|
SU1250932A1 |
| СКВАЖИННЫЙ ГЕОЛОКАТОР | 1965 |
|
SU172507A1 |
| ЛАЗЕРНЫЙ КОГЕРЕНТНЫЙ ЛОКАТОР | 2007 |
|
RU2352958C1 |