1
Изобретение, относится к контрольноизмерительной технике, а именно к способам измерения перемещений подвижных частей механизмов и приборов растровыми нониусными системами.
Известен способ измерения перемещений, основанный на анализе картины нониусного сопряжения растров l. Недостаток его заключается в невысокой чувствительности и сложности реализации.
Известен и другой способ измерения перемещений растровыми нониусными систмами, заключающийся в том, что измеряю степень несовпадения прозрачных элементов растров 2.
Но и этот способ не обладает достаточной чувствительностью, поскольку шаг .комбинационной картинь при определенной длине индикаторного растра может быть меньше длины этого растра.
Целью настоящего изобретения являются увеличение чувствительности измерения
Для достижежия поставленной цели в описываемом способе изменяют параметры одного или обоих сопрягаемых растров цо
тех пор, пока шаг комбиниционного сопряжения не станет равным длине индикаторного растра, и измеряют положение прозрачного элемента индикаторного растра, первого относительно начала отсчета и соВ падающего с прозрачным элементом измерительного растра.
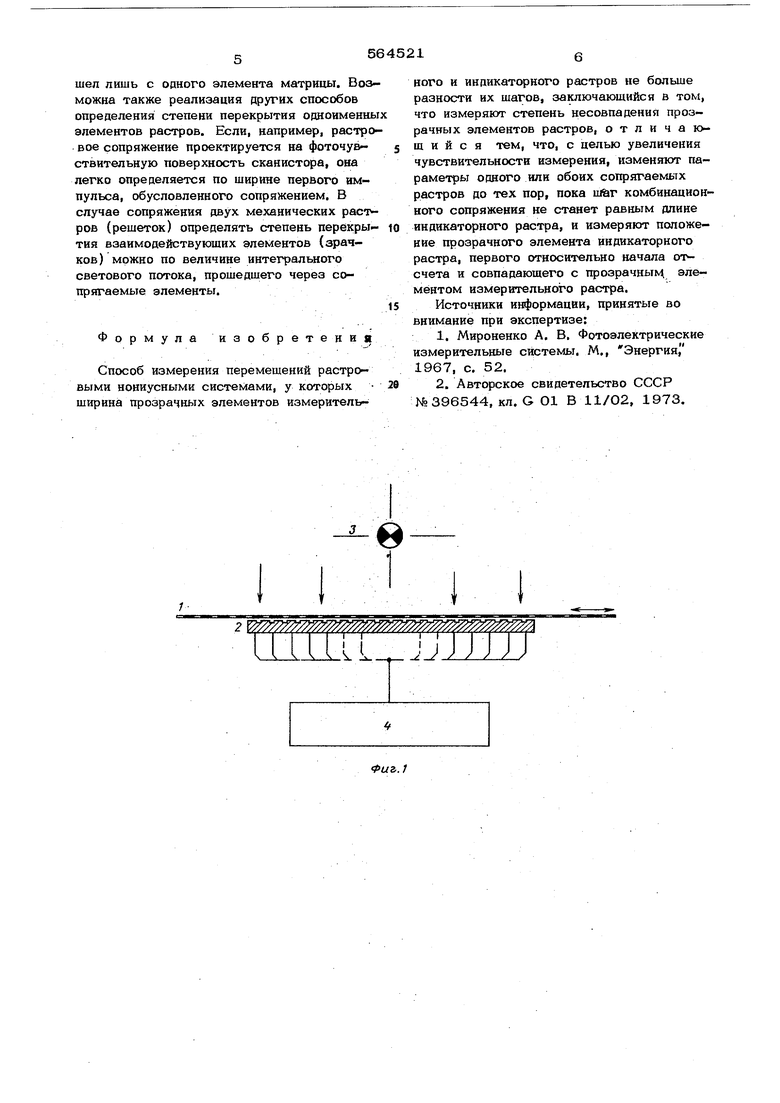
На фиг. 1 изображена схема устройства, реализующего данный способ; на фиг. 2 растровое сопряжение этого устройства.
Для реализации описываемого способа измерения перемещения используют измерительный растр 1, опорный индикаторный растр 2, источник излучения 3 и электронный блок отсчета перемещения 4.
Подвижный измерительный растр 1 представляет собой механическую рещетку с шагом О „зм и связан с перемещающейся частью какого-либо механизма (на чертеже не показан).
Индикаторный растр 2 выполнен опорным и образован фоточувствительными столбцами с щагом -О / фотоматрицы.
Из всех столбцов фотоматрицы элеменами рабочего индикаторного растра 5 шагом . являются лишь столбцы , 7, 8 9, 1О, 11, 12, 13. Этот растр 5 образует в комбинации с растром 1 доль оси ОХ из взаимного перемещения ониусное сопряжение. Взаимодействующии элементами растров являются столбцы , 7, 8, 9, 10, 11, 12, 13 растра 2 и ели (зрачки) 14, 15, 16, 17, 18, 19, 20 растра 1.
. Измертельный растр 1 отстоит от начала координат (точка О) на расстоянии Р , что определяется положением его условного нулевогозрачка 14 по оси ОХ,
Зрачки 21, 22, 23, 24, 25, 26 .опре деляют второе положение раствора, а условно нулевой зрачок 21 отстоит от начала координат, на расстояние . Дискретные элементы 27, 28, 29, 30, 31, 32, 33 фотоматрицы 8 различной степени виньетируются зрачками растра 1.
Все столбы растра 5 имеют условный код положения tn, определяющий расстояние столбца от начала коор динат, а все фотоэлементы столбцов растра 2 имеют условный код перекрытия Т1 , определяющий степень несовпадения столбцов растра 5 ,со щелями растра 1.
Процесс измерения перемещений по описываемому способу производится следующим образом.
После предварительной настройки системы измеряют параметры опорного индикаторного растра 2 (период растра, ширину элементов, взаимодействующих CDI щелями растра 1) таким образом, чтобы .щаг G комбинационного сопряжения, образованного между растром 1 и новым , рабочим индикаторным растром 5, стал равен длине этого индикаторного растра, а щйрина взаимодействующих элементов при этом была бы не более разности шагов растра 2 и 1 ( зм. )
При настройке измерительной системы в исходном нулевом положении растры 1 и 2 расположены так, чтобы условно нулевая щель 14 растра 1 открывала лишь нулевой (по коду перекрытия) фо-тоэлемент 31, совмещенный с началом оси ОХ.
После перемещения измерительного растра 1 определяется положение первого относительно начала оси ОХ элемента индикаторного растра (столбца растра 5), совпадающего со щелью растра 1, Для данной системы двух растров 1 и 5, элементы которых не параллельны друг другу, считается , что зрачки растра 1 в какой то степени совпадают со столбцами растра 5, если источнику излучения 3 хотя бы
В какой-то степени открыты нулевые элементы этих столбцов, лежащих на оси ОХ, Предполагается также, что дискретный фотоэлемент матрицы, включается только при минимальном виньетировании щелью растра 1, так, что из нескольких соседних фотоэлементов столбца, на которые падает свет от источника 3, включен лшль один (пои перемещении растра 1 на расстояние Е ОТ нулевого положения включается только фотоэлемент 28 столбца 9, а фотоэлементы 27 и 29 не включены, так как закрьтты краями щелей 16 и 17 растра 1 ), При первом положении растра 1 исковым первым элементом индикаторного растра 5 является столбец 9, а во втором положении из двух столбцов 11 и 12, нулевые элементы которых 32 и 33 открыты, таким элементом является столбец 11, Положение нужного столбца относительно начала О координат по оси ОХ определяется тем, что положение соответствующего стобца фиксировано, и относительно точки
0оси ОХ ему приписан код положения тп . Поэтому в первом случае положение столбца 9 определяется кодом положения , который имеют все элементы столбца 1О,
а во втором - кодом тп 5, который имею все элементы столбца 11, Электронный блок отсчета перемещений 4 определяет степень несовпадения сопрягающихся эле ментов, В описываемом сопряжении растров 1 И 5 это, по существу, - степень перекрытия щелями растра 5 нулевых фотоэлементов столбцов фотоматрицы. При полностью открытом источнику 3 нулевом фотоэлементе (например 28) включен только этот фотоэлемент. При смещении растра
1вдоль оси ОХ начинает засвечиваться нулевой элемент столбца 10, а элемент 28 столбца 9 начинает несовпадать сО щелью 17,
Из-за непараллельности щелей и столбцов по мере смещения растра 1 вдоль оси ОХ включаются последующие фотоэлементь столбца 9, Степень несовпадения элементов растра 1 с нулевыми фотоэлементами растра 5 определяется кодом перекрытия П , который приписан каждому фотоэлементу столбца фотоматрицы. Таким образом, в первом положении растра 1 степень несовпадения столбца 9 со щелью 17 равна нулю (код tl О фотоэлемента 28), а во втором - степень несовпадения первого из двух столбцов 11 и 12 со щелью 25 равна 7 (по коду ТТ 7 фотоэлемента 30 столбца 11), Для правильного определения степени несовпадения элементов растров 1 и 5 система настраивается так, чтобы при сопряжении растров сигнал п блок 4
шел лишь с одного элемента матрицы. Возможна также реализация других способов определения степени перекрытия одноименны элементов растров. Если, например, растровое сопряжение проектируется на фоточуаствительную поверхность сканистора, она легко определяется по ширине первого импульса, обусловленного сопряжением. В случае сопряжения двух механических рас-рров (решеток) определять степень перекрытия взаимодействующих элементов (зрачков) можно по величине интегрального светового потока, прошедшего через сопрягаемые элементы.
Формула изобретения
Способ измерения перемещений растровыми нониусными системами, у которых ширина прозрачных элементов измерительного и индикаторного растров не больше разности их шагов, заключающийся в том, что измеряют степень несовпадения прозрачных элементов растров, о т л и ч а и и с я тем, что, с целью увеличения чувствительности измерения, изменяют параметры одного или обоих сопрягаемых растров до тех пор, пока ЕЙГ комбинационного сопряжения не станет равным длине индикаторного растра, и измеряют положение прозрачного элемента индикаторного растра, первого относительно начала отсчета и совпадающего с прозрачныц элементом измерительнотро растра.
Источники информации, принятые во внимание при экспертизе:
1.Мироненко А. В. Фотоэлектрические измерительные системы. М., Энергия, 1967, с. 52.
2.Авторское свидетельство СССР №396544, кл.С 01 В 11/О2, 1973.

| название | год | авторы | номер документа |
|---|---|---|---|
| Фазоимпульсный преобразователь угловых перемещений | 1975 |
|
SU954821A1 |
| Жидкостной фотоэлектрический преобразователь угла наклона объекта | 1978 |
|
SU711355A1 |
| Фотоэлектрический преобразователь угловых перемещений | 1977 |
|
SU696280A1 |
| РАСТРОВО-КОДОВЫЙ ПРЕОБРАЗОВАТЕЛЬ УГЛОВЫХ ПЕРЕМЕЩЕНИЙ | 1991 |
|
RU2027206C1 |
| Устройство для точного отсчета углоизмерительных приборов | 1980 |
|
SU964440A2 |
| Датчик угла поворота вала | 1978 |
|
SU684297A1 |
| Устройство для измерения перемещений | 1972 |
|
SU464007A1 |
| Фотоэлектрический преобразователь перемещений | 1980 |
|
SU1089411A2 |
| Измерительное устройство для определения взаимного перемещения двух подвижных частей механизмов | 1960 |
|
SU142699A1 |
| Компенсационная измерительная система | 1973 |
|
SU742702A1 |
в
I I
