(54) ВОЛНОВОДНЫЙ СУММАТОР СИНФАЗНЫХ СИГНАЛОВ
взаимно перпендикулярны между собой и продольной осью третьего общего круглого волновода. Входные прямоугольные волноводы поляризационных тройников 1-4 соединены с соответствующими входами 115 волноводного сумматора синфазных сиг налов, а общий круглый волновод поляризационных тройников 1-4 закрыт с одного конца соответствующими короткозамыкателями 16-19,
Управляемый поляризатор представляет собой отрезок круглого волновода с расположенными внутри продольным ферритовым стеряшем и снаружи-катушкой, создающей продольное магнитное поле.
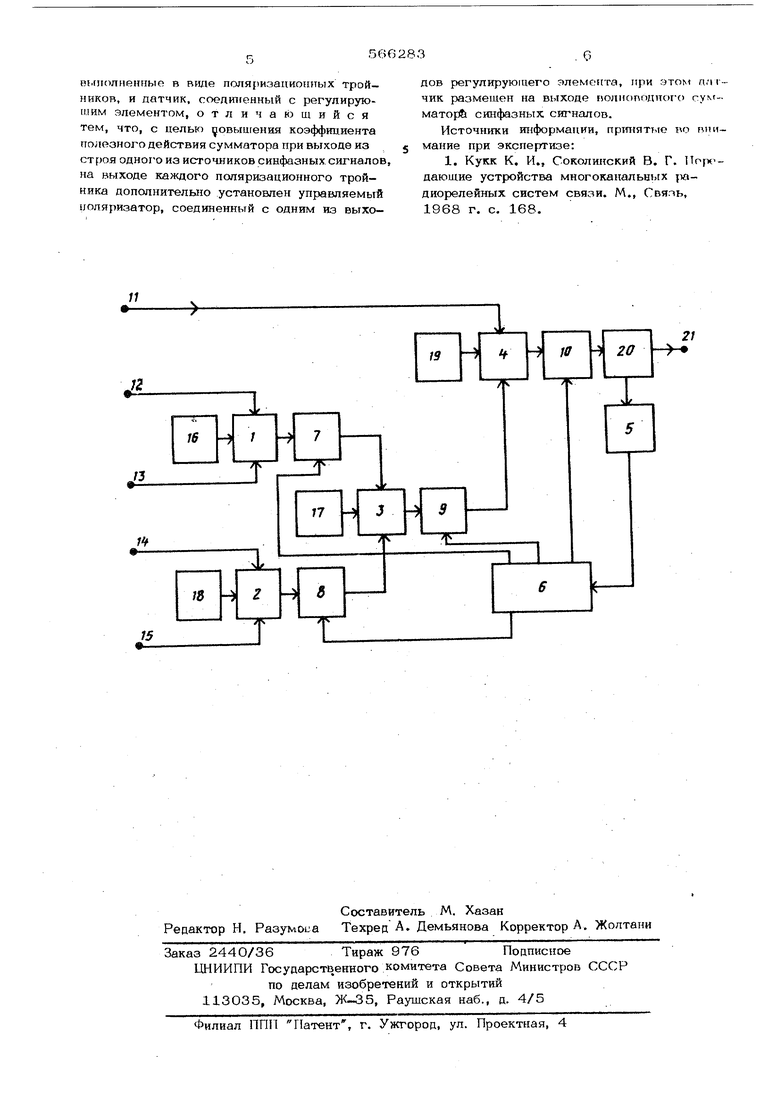
Вход регулирующего элемента в подключен к выходу датчика 5, выполненного в виде ответвителя с детектором. Вход датчика 5 подключен к выходу. волноводного перехода. 20, другой выход которого соединен с выходом 21 волноводного суммато ра синфазных сигналов, а вход волноводного перехода 20 соединен с выходом управляемого поляризатора 1О. Выходы управляемых поляризаторов 7 и 8 подключены к соответствующим входам поляризационного тройника 3, а выход управляемог поляризатора 9 подключен к другому входу поляризационного тройника 4.
Волноводный сумматор синфазных сигналов работает следующим образом.
Синфазные сигналы; от суммируемых источников синфазных сигналов поступают на. входы волноводного сумматора С1шфазны сигналов 11 - 15 которые представляют собой отрезки прямоугольных волноводов. Возбуждаемые в поляризационных тройниках 1-4 суммарные сигналы плоскоПоляризованы. Плоскости поляризации суммарных сигналов поляризационных тройников 1-3 при помощи управляемых поляризаторов 7-9 повернуты в положение, соответствующее режиму суммирования в последующем суммирующем элементе, при котором продольная ось общего волновода поляризационного тройника перпендикулярна плоскости поляризации входных сигналов.
Плоскость поляризации суммарного сигнала в поляризацнонном тройнике 4 при помощи поляризатора 10 поворнута перпендикулярно широкой стенке выходного волновоаэ B0ji«oiiounoro перехода 20. При таком положении р.лоскостей поляризации на рыходе 21 волноводиого q Mi aтора сшЦизимх cnntariOD равен сумме входных с)1гналов, и датчик 5 регистрнруот максимально.и ур)опонь MGLUIOCTH выходного сигнала. Л акс1Ь:пл1лному урог-я MoiinocTn выходного сигнала гл ,;маторо соответствуе наименьшая BoniPinii: сигимла с выхолл датчика, В случае отказа одного или нескольких входных источников синфвзиьгх сйгна;гов в соответствующих иоляризационных тройниках 1-4 уменьшается амштитула сшнала и плоскость поляризации пoвof aчивaeтcя относительно первоначального положения на некоторый угол. Это приводит к уменыиепин) амплитуды и повороту плоскости поляризации результирующего сигнала на выходе
21 сумматора синфазных сигналов. Поворот плоскости поляризации выходного сигнала вызывает приращение сигнала на вй1ходе датчика 5, который поступает на вход регулирующего элемента 6. Рег-улирующий
элемент 6 выдает команду управления па управляемые поляризаторы 7-10, KOTopjjie поворачивают плоскости поляризации сигналов соответствующих им.поляризационных тройников 1-4 до восстановления
прежнего положения, и удерживают их в этом положении. Наибольщий угол Поворота плоскости поляризации управляемым поляризатором зависит от соотнощепия амплитуд суммиру.емых сигналов и может сое-
тавлять 90 . При равных амплитудах суммируемых сигналов и уменьшении одного из них до нуля угол поворота плоскости поляризации должен составлять i 45 в зависш 1ости от отказавшего источника,
Сигнал на выходе волноводного сумматора синфазных сигналов уменьщается лишь на величину мощности отказавших источников.
Введение управляемых поляризаторов
на выходе каждого суммирующего элемента в волноводном сумматоре синфазных сигналов дает возможность автоматичесзш восстанавливать заданный режим сложения мощностей оставшихся источников синфазных сиг налов , т.е. автоматически обеспечивать требуемый к,п. д.
Эффективность такого волноводного сумматора синфазных сигналов проявляется при суммировании любого числа источников, причем амплитуды сигналов сук мируемых источников можно изменять в щирюких пределах в процессе эксплуатации. В двухканальном . волноводпом сумматоре такой конструкции при выходе из строя одного из источников
синфазных сигналов на выходе поддерживается мощность Г-, вместо Р, восьмиканалыюм сумматоре с nonapiro последовательной схемой сложения при выходе из
строя ОДЬЮГО из ИСТОЧНИКСВ СИН()аЗНЫХ СИГпалов на выходе поддерживается кюшность 7F вместо 4 и 5д Р.
Ф о р м у л а и 3 о б р е т е п н я Волноводный cyMNfarop си1)||плных сигналов, содери.ап.ий cy t :lfpyloп и( апомрнтьг.
выисшненные в вщ1е поляризационных тройников, и датчик, соедт«енный с регулируюшим элементом, отличающийся тем, что, с целью овышения коэффициента полезного действия сумматора при выходе из строя одного из источников синфазных, сигналов, на выходе каждого поляризационного тройника дополнительно установлен управляемый поляризатор, соединенный с одним из выходов регулирующего элемента, при этo n.iiчик размешен на выходе волпоподпогч) cyN-маторй синфазных сигналов.
Источники информации, пр1тятт.1е во FMIHмание при экспертизе:
1. Кукк К. И., Соколинский В. Г. Пор-дающие устройства многоканальных jiaдиорелейных систем связи. М., Свяпь, 1968 г. с. 168.
| название | год | авторы | номер документа |
|---|---|---|---|
| ИМИТАТОР ВЫСОКОГО УРОВНЯ МОЩНОСТИ | 1993 |
|
RU2073940C1 |
| Устройство управления поляризацией | 1987 |
|
SU1841183A1 |
| МОНОИМПУЛЬСНАЯ АНТЕННА | 2008 |
|
RU2370863C1 |
| Волноводный поляризатор | 1989 |
|
SU1709437A1 |
| Устройство для работы на двух круговых поляризациях в двух диапазонах частот | 2016 |
|
RU2638902C1 |
| МОНОИМПУЛЬСНЫЙ ОБЛУЧАТЕЛЬ | 2008 |
|
RU2380804C1 |
| ПОЛЯРИЗАЦИОННО-МОДУЛЯЦИОННАЯ РАДИОМАЯЧНАЯ СИСТЕМА ИЗМЕРЕНИЯ УГЛА КРЕНА ЛЕТАТЕЛЬНОГО АППАРАТА | 2020 |
|
RU2745836C1 |
| Низкопрофильная двухдиапазонная спутниковая антенная система | 2024 |
|
RU2820884C1 |
| Способ поворота плоскости поляризации и стовосьмидесятиградусный поляризатор, его реализующий | 2020 |
|
RU2751151C1 |
| КАСКАД ПРИЕМНОГО УСТРОЙСТВА С РАЗДЕЛЕНИЕМ ОРТОГОНАЛЬНЫХ ПОЛЯРИЗАЦИЙ ДВУХ ДИАПАЗОНОВ ЧАСТОТ | 1998 |
|
RU2149484C1 |
