Изобретение относится к радионавигации и может использоваться в пилотажно-навигационных системах ориентации летательного аппарата (ЛА) при заходе на посадку по приборам.
Известны устройства измерения угла крена ЛА основанные на использовании инерциальных систем навигации, в частности, гироскопических систем ориентации [1, 2]. Таким устройствам присущ ряд недостатков. Во-первых, с течением времени происходит постоянное накапливание ошибки измерений и за один час полета она составляет величину единицы градусов [2]. Во-вторых, если ЛА развивает значительные перегрузки, то происходит увеличение собственной скорости процессии гироскопа, что в ряде случаев может привести к полной потере его работоспособности [2].
Поскольку известные устройства измерения угла крена ЛА основаны на другом физическом принципе, по сравнению с заявляемой, то они не могут рассматриваться в качестве аналогов, так как не имеют общих признаков.
Известен способ измерения угла крена ЛА и устройство для его реализации (Патент № 2475863 МПК G08G 5/02) [3].
Способ измерения угла крена ЛА заключается в том, что из точки с известными координатами излучают горизонтально линейно поляризованные электромагнитные волны, вектор напряженности электрического поля которых совпадает с горизонтальной плоскостью. Принимают электромагнитные волны на борту ЛА в линейном поляризационном базисе орты которого составляют величину - 






где 



Устройство измерения крена ЛА [3] содержит радиомаяк включающий в себя передатчик, выход которого подключен к передающей антенны, расположенной в точке с известными координатами и расположенные на борту ЛА приемная антенна, линейный поляризационный разделитель, амплитудный угловой дискриминатор и вычислитель. При этом выход приемной антенны подключен к входу линейного поляризационного разделителя, два выхода которого подключены к соответствующим двум входам амплитудного дискриминатора, выход которого подключен к входу вычислителя. Вычислитель по формуле (1) рассчитывает угол крена 

Недостаток устройства измерения угла крена ЛА заключается в том, что для его практической реализации необходимо использовать СВЧ двухканальное бортовое приемное оборудование, что увеличивает его габариты и вес. Кроме того, требуется соблюдать идентичность амплитудно-частотных характеристик приемных каналов, чтобы исключить погрешности определения угла крена ЛА.
Наиболее близким по совокупности признаков к заявляемой поляризационно-модуляционной радиомаячной системе измерения угла крена ЛА является устройство измерения угла крена ЛА, реализующее поляризационно-модуляционный способ измерения (Патент № 2475862 РФ М.кл.4 G08G 5/02. Заявлена 04 августа 2011 г.) [4].
Суть поляризационно-модуляционного способа измерения угла крена ЛА заключается в том, что из точки с известными координатами излучают горизонтально поляризованные электромагнитные волны, вектор напряженности электрического поля 


где 
Выделяют из принятого сигнала (2) спектральную составляющую на частоте 

где 

Устройство измерения угла крена ЛА содержит передатчик с подключенной к нему передающей антенной с горизонтальной собственной поляризацией, расположенной в точке с известными координатами, и расположенные на борту ЛА приемную антенну, вращатель плоскости поляризации, выполненный в виде фарадеевского вращателя плоскости поляризации на основе круглого волновода, в центральной части которого помещен ферритовый стержень, расположенный по оси продольного магнитного поля катушки с током, намотанной с внешней стороны круглого волновода, задающий генератор, формирователь опорного сигнала, линейный поляризатор, выполненный в виде перехода волновода с круглого сечения на прямоугольный волновод, логарифмический приемник, полосовой фильтр настроенный на частоту
Работа устройства измерения угла крена ЛА заключается в следующем.
Передатчик, через подключенную к нему передающую антенну, излучает горизонтально поляризованные электромагнитные волны. На борту ЛА горизонтально поляризованные электромагнитные волны принимаются приемной антенной и поступают на сигнальный вход фарадеевского вращателя плоскости поляризации, а на его управляющий вход с выхода задающего генератора подается гармоническое изменение тока подмагничивания с частотой 


Недостаток устройства измерения угла крена ЛА заключается в том, что при использовании фарадеевского вращателя плоскости поляризации невозможно, как известно [5-7], обеспечить линейность его модуляционной характеристики при гармоническом изменении напряженности магнитного поля. Последнее обусловлено тем, что угол поворота плоскости поляризации выходной волны не линейно зависит от величины тока, протекающего через катушку намотанную с внешней стороны круглого волновода, т.е. не линейно зависит от величины прикладываемого внешнего магнитного поля Н, создаваемого катушкой с током. Линейность обеспечивается только для малых значений Н, когда намагниченность феррита далека от насыщения, соответствующего продольному ферромагнитному резонансу, но при этом не обеспечивается необходимый диапазон вращения плоскости поляризации сигнала [5,6]. Кроме того, ферритовый материал обладает фундаментальным свойством - петлей гистерезисного цикла феррита, которое заключается в том, что кривая первоначального намагничивания феррита по мере увеличения прикладываемого внешнего магнитного поля Н не совпадает с кривой размагничивания феррита при снижении напряженности поля, сохраняя при этом в отсутствии внешнего поля магнитный момент, характеризующийся величиной остаточной магнитной индукцией В, что так же приведет к искажению линейности модуляционной характеристики принятых сигналов [5]. Все перечисленные недостатки устройства измерения угла крена, связанные с нелинейностью модуляционной характеристики принятых сигналов, приведут несомненно к амплитудным и фазовым искажениям огибающей выходного сигнала приемника. Это в свою очередь приведет к амплитудным и фазовым искажениям информативной спектральной составляющей на частоте
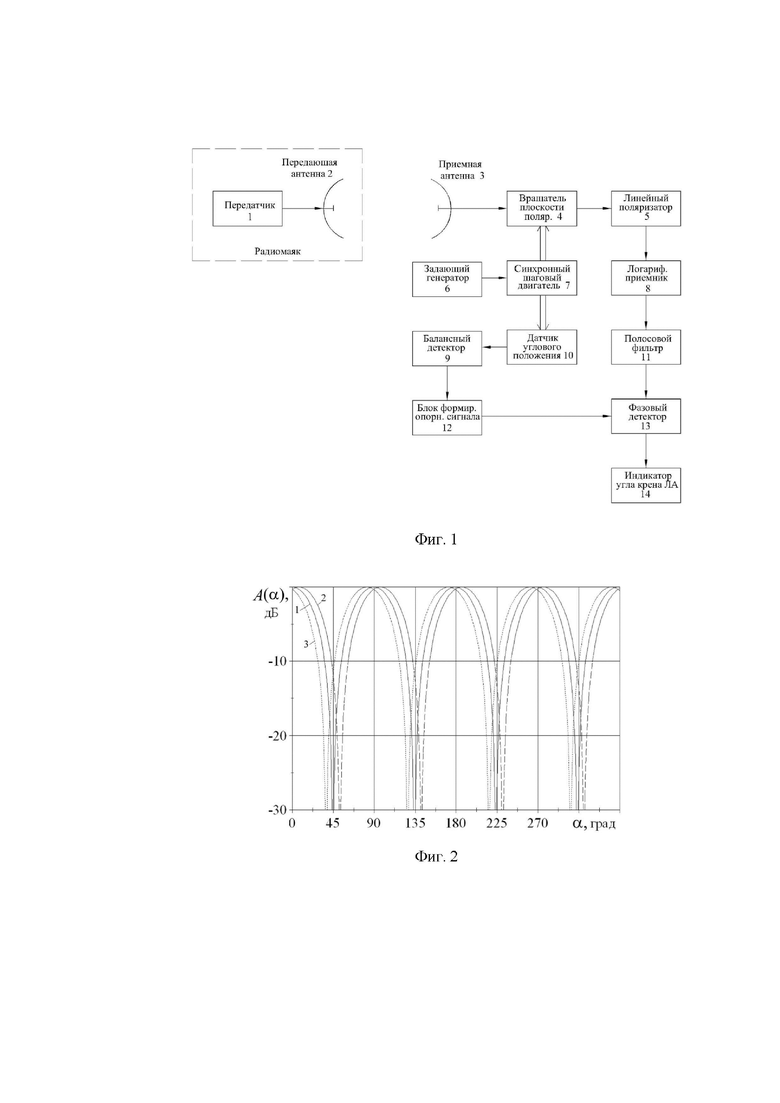
На фиг. 1 представлена структурная электрическая схема поляризационно-модуляционной радиомаячной системы измерения угла крена ЛА, реализующая поляризационно-модуляционный способ измерения угла крена [4].
На фиг. 2 представлена зависимость амплитуды выходного сигнала логарифмического приемника от углового положения полуволновой фазовой пластины.
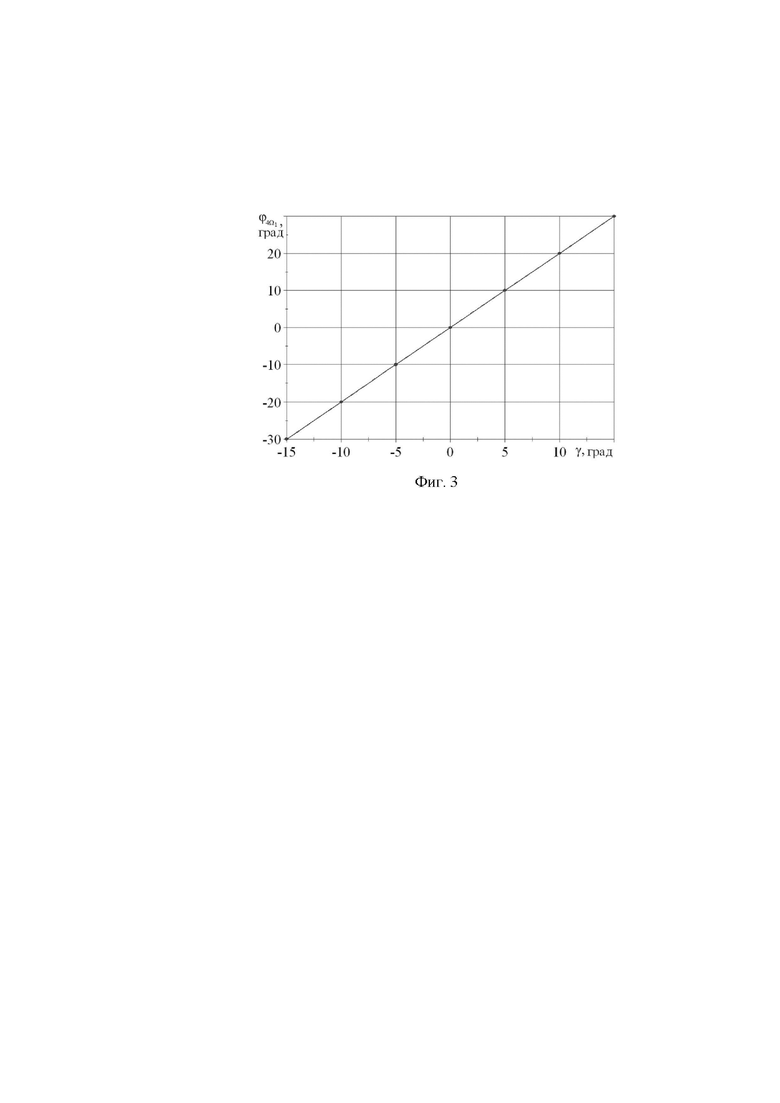
На фиг. 3 приведена зависимость фазы спектральной составляющей на частоте 

Поляризационно-модуляционная радиомаячная система измерения угла крена ЛА содержит радиомаяк, включающий в себя передатчик 1 и передающую антенну 2, расположенные в точке с известными координатами. На борту ЛА система содержит приемную антенну 3, вращатель плоскости поляризации 4, выполненный в виде вращающейся секции круглого волновода с вмонтированной внутрь полуволновой фазовой пластины, линейный поляризатор 5, задающий генератор 6, синхронный шаговый микродвигатель 7, логарифмический приемник 8, балансный детектор 9, датчик углового положения 10, полосовой фильтр 11, блок формирования опорного сигнала 12, фазовый детектор 13, индикатор угла крена ЛА 14.
Поляризационно-модуляционная радиомаячная система измерения угла крена ЛА работает следующим образом.
Передатчик 1 через передающую антенну 2 с горизонтальной собственной поляризацией, расположенные в точке с известными координатами, излучает в направлении ЛА горизонтально поляризованные электромагнитные волны, вектор напряженности электрического поля
На борту ЛА электромагнитные волны принимаются приемной антенной 3. С выхода приемной антенны 3 сигнал поступает на сигнальный вход вращателя плоскости поляризации с частотой 



Вращение секции круглого волновода обеспечивается синхронным шаговым микродвигателем 7, механически связанным с помощью шестерной зубчатой передачи 1:1 с секцией круглого волновода 4. Частота вращения секции круглого волновода 
Вращение плоскости поляризации принимаемых электромагнитных волн с частотой 


Установим связь амплитуды 

Для установления этой связи воспользуемся известным [8,9] формализмом векторов и матриц Джонса.
Предположим, что расстояние от радиомаяка до ЛА велико и фазовый фронт волны вблизи ЛА можно считать плоским. Тогда, используя представление плоской однородной электромагнитной волны вектором Джонса [6], излучаемые радиомаяком горизонтально поляризованные электромагнитные волны можно представить в линейном поляризационном базисе в векторной форме (опуская временную зависимость) ввиде

Для описания взаимодействия горизонтально поляризованных волн (5) с высокочастотным трактом бортовой приемной антенной с вмонтированным в СВЧ тракт вращателем плоскости поляризации, выполненным в виде вращающейся секции круглого волновода с встроенной внутрь полуволновой пластиной 

где 





Выполнив в (6) необходимые преобразования, получим вектор Джонса выходной волны линейного поляризатора 5 в виде
С учетом (7) сигнал на входе приемника, как функция угла ориентации 

Амплитуда сигнала на выходе приемника 8 с логарифмической амплитудной характеристикой и линейным детектором будет равна

После преобразований выражение (9), с учетом того, что уровень сигнала в случае логарифмического приемника обычно измеряется в децибелах, при

что полностью согласуется с результатами исследований, полученных авторами в [10]. Там же показано, что если записать вектор Джонса выходной волны линейного поляризатора 5 в опорной системе координат, связанной с радиомаяком, то угол ориентации плоскости поляризации выходной волны линейного поляризатора 5 будет определятся только углом крена 
Из (10) следует, что в спектре огибающей выходного сигнала логарифмического приемника присутствует только спектральная составляющая на учетверенной частоте вращения 




Необходимо отметить, что фаза 
Соотношение (10) позволяет рассчитать зависимость амплитуды выходного сигнала логарифмического приемника от углового положения полуволновой фазовой пластины для различных значений 
Как видно из графиков, амплитудная модуляция сигнала на выходе логарифмического приемника 8 достигает 100%. При этом угол крена не влияет на форму этой зависимости и на глубину амплитудной модуляции, а определяет только ее сдвиг по фазе. Причем за полный оборот полуволновой
Применив преобразование Фурье к соотношению (10), амплитуду спектральной составляющей на частоте
и при 




где

Результаты расчетов (13-15) показали, что амплитуда
В 3-см диапазоне длин волн заявляемая поляризационно-модуляционная радиомаячная система измерения угла крена летательного аппарата может быть реализована следующим образом.
В качестве передатчика 1 может использоваться, например, стандартный генератор высокочастотных сигналов типа Г4-83.
В качестве передающей антенны 2 с горизонтальной собственной поляризацией может быть использована рупорная антенна [11], с. 248.
Приемная антенна 3 может быть выполнена в виде круглого рупора см. [12], с. 510.
Вращатель плоскости поляризации 4 выполнен в виде вращающейся секции круглого волновода с вмонтированной внутрь полуволновой
Линейный поляризатор 5 с горизонтальной собственной поляризацией выполнен в виде перехода с волновода круглого сечения на волновод с прямоугольным сечением [5-10].
Задающий генератор 6 может быть выполнен в виде стандартного генератора сигналов Г5-54.
Синхронный шаговый микродвигатель 7 используется типа ДШ – 0,025 А.
Логарифмический приемник 8, балансный детектор 9, полосовой фильтр 11, блок формирования опорного сигнала 12, фазовый детектор 13 могут быть выполнены с помощью известных технических решений широко используемых в бортовых радиолокационных системах обзора земной поверхности, применяемых на летательных аппаратах [13].
Датчик углового положения полуволновой фазовой пластины 10 может быть выполнен в виде сельсина [13], ось которого с помощью шестерной передачи связана с валом ротора синхронного шагового микродвигателя 7.
Индикатор 14 может быть выполнен в виде стрелочного прибора, шкала которого прокалибрована в градусах угла крена ЛА.
По сравнению с широко используемыми вращателями плоскости поляризации, основанными на эффекте Фарадея, заявляемая поляризационно-модуляционная радиомаячная система измерения угла крена ЛА, использующая в качестве вращателя плоскости поляризации вращающуюся полуволновую фазовую пластину, позволяет избежать ошибки измерения угла крена ЛА за счет обеспечения линейности модуляционной характеристики принятых сигналов для любых угловых положений полуволновой фазовой пластины.
Источники информации
1. Александров А.С., Арно Г.Р. и др. Современное состояние и тенденции развития зарубежных средств и систем навигации подвижных объектов военного и гражданского назначения. Санкт-Петербург, 1994. - 119 с.
2. Пельпор Д.С., Ягодкин В.В. Гироскопические системы. М.: «Высшая школа», 1977. – 216 с.
3. Гулько В. Л. Способ измерения угла крена летательного аппарата и устройство для его реализации Патент RU № 2475863 МПК G08G 5/02, приоритет от 08.04.2011 г.
4. Гулько В. Л. Способ измерения угла крена летательного аппарата и устройство для его реализации Патент RU № 2475862 МПК G0G 5/02, приоритет от 04.08.2011 г.
5. Канарейкин Д.Б., Павлов Н.Ф., Потехин В.А. Поляризация радиолокационных сигналов. М: «Сов. радио», 1966. - 440 с.
6. Канарейкин Д.Б., Потехин В.А., Шишкин И.Ф. Морская поляриметрия. Л.: «Судостроение», 1963. - 328 с.
7. Богородский В.В. Канарейкин Д.Б., Козлов А.И. Поляризация рассеянного и собственного радиоизлучения земных покровов. Л.: «Гидрометеоиздат», 1981. - 279 с.
8. Аззам Р., Башара П. Эллипсометрия и поляризованный свет. М.: «Мир», 1981. - 588 с.
9. Татаринов В.Н., Татаринов С.В., Лигтхарт Л.П. Введение в современную теорию поляризации радиолокационных сигналов. Томск: Издательство Томского университета, 2006. – 349с.
10. Гулько В. Л., Мещеряков А. А. Метод измерения крена летательного аппарата по излученным горизонтально поляризованным сигналам радиомаяка. // Изв. Вузов Приборостроение, 2017. Т 60, № 5, с.с. 412-419.
11. Драбкин А. Л., Зузенко В.Л., Кислов А.Г. Антенно-фидерные устройства. М.: «Советское радио» 1974. - 536 с.
12. Жук М.С., Молочков Ю.Б. Проектирование антенно-фидерных устройств. М.: «Энергия», 1966. -648 с.
13. Давыдов П.С. Радиолокационные системы воздушных судов. М.: «Транспорт», 1988. – 359 с.
Поляризационно-модуляционная радиомаячная система измерения угла крена ЛА содержит радиомаяк, включающий в себя передатчик (1) и передающую антенну (2), расположенные в точке с известными координатами. На борту ЛА система содержит приемную антенну (3), вращатель плоскости поляризации (4), выполненный в виде вращающейся секции круглого волновода с вмонтированной внутрь полуволновой фазовой пластины, линейный поляризатор (5), задающий генератор (6), синхронный шаговый микродвигатель (7), логарифмический приемник (8), балансный детектор (9), датчик углового положения (10), полосовой фильтр (11), блок формирования опорного сигнала (12), фазовый детектор (13), индикатор угла крена ЛА (14). Обеспечивается повышение точности измерения угла крена. 3 ил.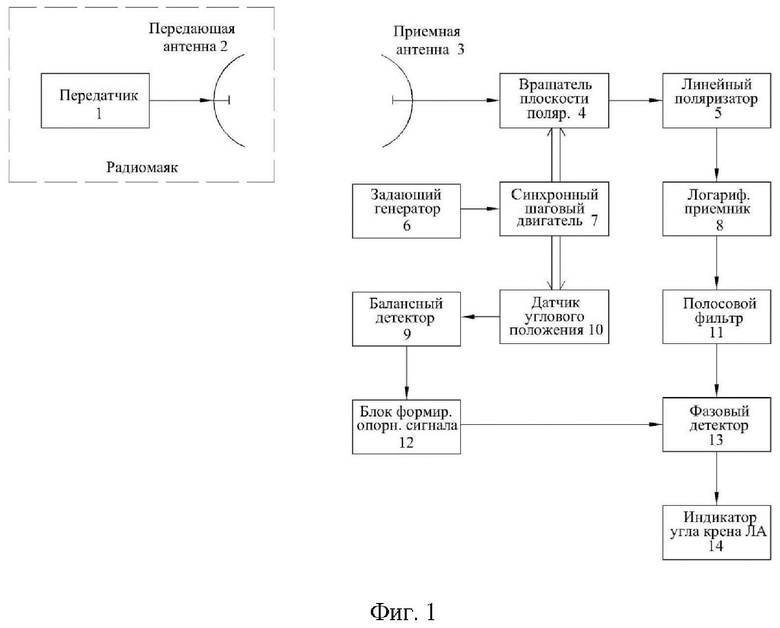
Поляризационно-модуляционная радиомаячная система измерения угла крена летательного аппарата, содержащая радиомаяк, включающий в себя передатчик, выход которого соединен с входом передающей антенны с горизонтальной собственной поляризацией, расположенной в точке с известными координатами, и расположенные на борту летательного аппарата приемная антенна, выход которой подключен к входу вращателя плоскости поляризации с частотой 

| ПОЛЯРИЗАЦИОННО-МОДУЛЯЦИОННЫЙ СПОСОБ РАДИОЛОКАЦИОННОГО ИЗМЕРЕНИЯ УГЛА КРЕНА ЛЕТАТЕЛЬНОГО АППАРАТА И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2013 |
|
RU2537384C1 |
| Устройство для накопления и отправления телеграфных сигналов | 1939 |
|
SU68672A1 |
| СПОСОБ ИЗМЕРЕНИЯ УГЛА КРЕНА ЛЕТАТЕЛЬНОГО АППАРАТА | 2014 |
|
RU2567240C1 |
| СПОСОБ ИЗМЕРЕНИЯ УГЛА КРЕНА ЛЕТАТЕЛЬНОГО АППАРАТА И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2011 |
|
RU2475863C1 |
| US 5075694 A1, 24.12.1991 | |||
| WO 2019195327 A1, 10.10.2019. | |||

