1
Изобретение относится к системам управления реверсивными тиристорными эпектроприводами с раздельным управлением группами тиристоров преобразователя, в которых главное: минимальное время протекания педоходных процессов а режиме прерывистых
токов, величина бестоковой паузы при реверсировании грутш-тиристоров, обеспечение надежной остановки приводного двигателя при нулевом задании и при одновременном обеспечении безлюфтовой регулировочной характеристики тиристорного преобразователя.
Известны различные устройства, с помощью которьпс решаются отдельные из указанных вопросов,
Известны, например, адаптивные регуляторы, имеющие видоизменяющуюся передаточную функцию йри переходе к регулированию в режиме прерывистых токов от режима непрерывного тока ij.
Системы с адаптивным регулятором характеризуются сложностью, а также трудностью при б(беспечении процессов высокого качества в моменты скачкообразного переклк чения структур, связанными с нал11чием
всплесков управляющего напряжения на регулирующих операшюнных усилителях, содержащих конденсаторы в цепях обратных связей.
Кроме ТОГО, при изменении коэффициента усиления не учитываются длительность, а мплитуда пульсаЯий тока и степень рассогласования регулировочных характеристик отг дельных групп тиристоров.
Известны системы, имеющие дополнительную связь с технологическим оборудованием для учета возмущений со стороны этого обо рудования 2j. Однако такие системы сложны, и в каждом конкретном случае необходимо принимать отдельнъ5е решения. Вопросы, связанные с исключением ползучести .скорости двигателя, уменьшением бестоКовой паузы при переключении групптиристоров, в таких системах не решаются.
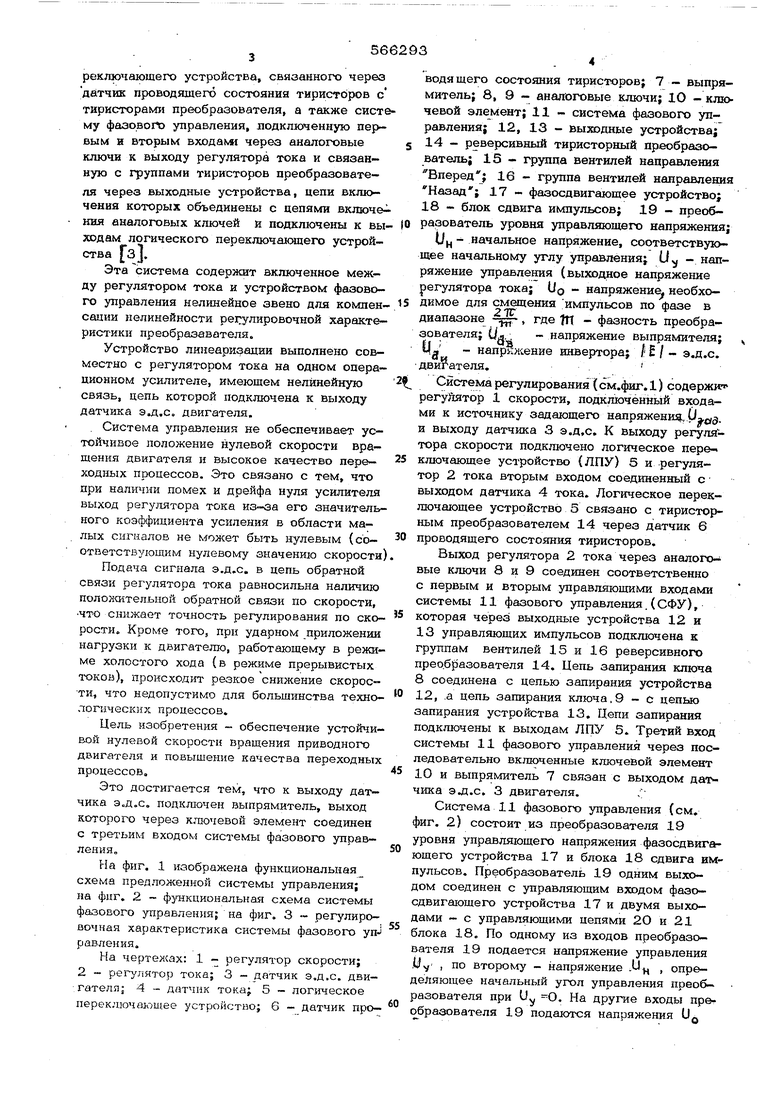
Из известных систем управления наиболее близкой к предложенной по технической сущности является система, содержащая двухконтурную систему регулирования, состоящую из регуляторов скорости н тока, датчиков скорости и тока, логического перекяюпаюшего устройства, связанного через датчик проводящего состояния тиристоров с тиристорами преобразователя, а также систе му фааовоПэ управления, лодключенную первым и вторым входами через аналоговые ключи к выходу регулятора тока и связанную с группами тиристоров преобразователя через выходные устройства, цепи включения которых объединены с цепями включе НИН аналоговых ключей и подключены к вы ходам логического переключающего устройства з. Эта система содержит включенное между регулятором тока и устройством фазового управления нелинейное звено для компенсации нелинейности ре1гулировочной характеристики преобразаватедя. Устройство линеаризации выполнено совместно с регулятором тока на одном операционном усилителе, имеющем нелинейную связь, цепь которой подключена к выходу датчика з.с. двигателя. Система управлегшя не обеспечивает устойчивое положение нулевой скорости вращення двигателя и высокое качество переходных процессов. Это связано с тем, что при наличии помех и дрейфа нуля усилителя выход регулятора тока из-за его значительного коэффициента усиления в области малых сигналов не может быть нулевым (соотпетствуюшим нулевому значению скорости Подача сигнала э.д.с. в цепь обратной связи регулятора тока равносильна наличию положительной обратной связи по скорости, что снижает точность регулирования по скорости. Кроме того, при ударном приложении нагрузки к двигателю, работающему в режиме холостого хода {в режиме прерывистых ачэкоа), происходит резкое снижение скорости, что недопустимо для большинства технологических процессов. Цель изобретения обеспечение устойчивой нулевой скорости вращения приводного двигателя и повышение качества переходных процессов, Это достигается тем, что к выходу датчика э.д,с. подключен выпрямитель, выход которого через ключевой элемент соединен с треаъим входом системы фазового управления. На фиг. 1 изображена функциональная схема предложенной системы управления; на фиг. 2 функциональная схема системы фазового управления; на фиг. 3 регулировочная характеристика системы фазового yn равления. На чертежах: 1 - регулятор скорости; 2 - регулятор тока; 3 - датчик э.д.с. двигателя; 4 датчик тока; 5 - логическое переключающее устройство; 6 - датчик про водящего СОСТО5ШИЯ тиристоров; 7 выпрямитель; 8, 9 - аналоговые ключи; 10 -ключевой элемент; 11 - система фазового управления; 12, 13 - выходные устройства; 14 - реверсивный тиристорный преобразователь; 15 - группа вентилей направления Вперед ; 16 - группа вентилей направления Назад; 17 - фазосдвигаюшее устройство; 18 - блок сдвига импульсов; 19 - преобразователь уровня управляющего напряжения; ( начальное напряжение, соответствук щее начальному углу управления; U - напряжение управления (выходное напряжение регулятора тока; UQ - напряжение, необходимое для смещения импульсов по фазе в диапазоне -, где ftl - фазность преобразователя; и,я.. - напряжение выпрямителя; Ц а - напркл ение инвертора; Е / - э.д.с. двигателя. Система регулирования (см.фиг. 1) содержи регуйятор 1 скорости, подключенный входами к источнику задающего напряжение. U.,,. и выходу датчика 3 э.д.с, К выходу регулятора скорости подключено логическое пере-, ключающее устройство (ЛПУ) 5 и регулятор 2 тока вторым входом соединенный с выходом датчика 4 тока. Логическое переключающее устройство 5 связано с тиристорным преобразователем 14 через датчик 6 проводящего состоягния тиристоров. Выход регулятора 2 тока через аналогевые ключи 8 и 9 соединен соответственно с первым и вторым управляющими входами системы 11 фазового управления. (СФУ), которая через выходные устройства 12 и 13 управляющих импульсов подключена к группам вентилей 15 и 16 реверсивного преоб{5азователя 14. Цепь запирания ключа 8 соединена с цепью запирания устройства 12, .а цепь запирания ключа.9 - с цепью запирания устройства 13, Цепи запирания подключены к выходам ЛПУ S. Третий вход системы 11 фазового управления через последовательно включенные ключевой элемент 10 и выпрямитель 7 связан с выходом датчика Э.Д.С. 3 двигателя.,; Система 11 фазового управления (см, фиг. 2) состоит из преобразователя 19 уровня управляющего напряжения фазосдвигающего устройства 17 и блока 18 сдвига омпульсов. Преобразователь 19 одним выходом соединен с управляющим входом фазосдвигающего устройства 17 и двумя выходами - с управляющими цепями 20 и 21 блока 18. По одному из входов преобразователя 19 подается напряжение управления .Uy , по второму - напрялсение .U , определяющее начальный угол управления преобразователя при Uy О. На другие входы преобразователя 19 подаются напряжения , задающие порог срабатывания фиксаторов уровней, расположенных в преобразователе 19. Уставка срабатывания 2 UQ соединена с выходом ключевого элемента 10, на вход которого подается сигнал, пропорциональный модулю э.с. двигателя /ЕЛ На вход фазосдвигающего устройства подаются синхронные с сетевым напряжением импульсы, частота котбрых равна Itif , где ttt -фазность преобразователя, f - частота сети. Система управления функционирует.следующим образом. Система управления скоростью двигателя двухконтурная, внутренним контуром яв.ляется контур регулирования тока с регулятором 2 тока и датчиком 4 тока. Раздельное управление комплектами преобразователя осуществляется с помощью логического переключающего устройства 5, Так как устройство 5 подключено к выходу регулятора 1 скорости, то на вход этого устройства поступают сигналы заданной и фактической скоростей. В зависимости 6т знака напрялсения регулятора 1 скорости переключающее устройство 5 включает :выходные устройства 12 или 13 (соответственно группа вентилей 15 или 16). При этом выходное :Напряжение регулятора 2 тока поступает на вход системы 11 управления через прямой ключ 8 или через инвертирующий ключ 9. При работе группы. вентилей 15 открыты ключ 8 и .выходное устройство 12, при работе группы вентилей 16 - ключ 9 и выходное устройство 13. Переключение выход ных устройств и ключей происходит благода ря датчику 6 проводящего состояютя тиристоров только ври отсутствии тока в якорной цепи двигателя, т.е. при запертом состояни тиристоров преобразователя. Система 11 фазового управления осущес вляет преобразование напряжения /у в величину угла управления преобразователя. Точка отсчета угла управления задается син хроимпульсами, поступающими на вход фазо сдвигающехх) устройства 17. Регулировочная характеристика системы фазового управления состоит из /ррех интервалов, где каждый интервал составляет-максимально величину (6О - для трехфазного мостового преобразователя) равную дискр€ тностн преобразователя и интервалу между входными синхронизирующими импуль сами СФУ с частотой tni . СФУ производит сдвиг импульсов по фазе максимально на величину ,) . Напряжение управления для сдвига импульсов в этом интервале состав- Полному диапазону регулировани 18О соответствует напряжение управления U,3UotaK как в устройстве 17 фазосмещение импульсов максимально составляет величи- ну --р , то для получения угла управления oL Щт сигнал управления, поступающий на вход устройства 17, должен быть равен нулю в момент, когда фазовый сдвиг импульСОВ достигает величины - , а напряжение управления - величины .Од . Одновременно в преобразователе 19 вырабатывается логический сигнал, поступающий по цепи 20 на вход блока 18, «оторый осуществляет переключение импульсов, поступающих с устройства 17 на один разряд так, что фаза импульсов на выходе блока 18 в данный момент остается равной -. При увеличении уровня U ройство 17 вновь осуществляет сдвиг импульсов в диапазоне под воздействием сигнала управления U t) - Lf , фаза им-. пульсов на выходе блока 18 равна 2 пГ Логический сигнал вырабатывается на цепи . В функции этого сигнала прэизводится переключение импульсов по выходам блока 18 еще на один разряд, а сигнал на выходе устройства 17 вновь пришхмает нулевое значение. Следовательно, сигнал управления, поступающий на устройство 17, имеет вид U-(Ui, ч LIj)-K-Uj-, . Фаза ик-тульсов на выходе СФУ paBHaoL ,K-UQj а фаза импульсов на выходе блока 18 t f-K -i- о( . (} и,,)- К и . где g - коэффициент преобразо-5ашш(зл-гр«А /вУ При таком законе фазосмещения управляющих импульсов обеспечивается повторная выдача импульсов на выходных шипах блока 18 в динамике, что исключает потерю информации в системе 11 фазового управления и позволяет при одиом комплекте этой системы достичь беетоковую пауау при переключении вентилей по величине не более, чем иитервал дискретности преобразователя. При нулевом задании скорости ( угол управления oL преобразователя устанавливается благодаря нап эялссиию (J таким, что выходное напряжеине преобразователя равно нулю (Uj О). Этот угол для трехфазной мостовой схемы преобразователя и малой индуктивности якорной цепи двигателя равен или больше 120 - и соответствует точке на регулировочной характеристике (см. фиг. 3). При этом порог срабатывания фиксатора уровня, вырабатывающего логический сигнал, поступающий на вход блока 18 по цепи 21, равен 1,5 . 0 , что соотЕетствует углу упраалйния оС . ГТорог срабатывания задается с помощью потенциометра (см, фиг. 2) при } ась шонном тракисторе ключевого элемента 10. Транзистор оллекторным выходом через резистор подлючен к выходу потенциометра и шунтирует его выход.
При задании скорости (gcilд хода регулятора 2 тока поступает напряжение и , которое, алгебраически суммируясь с напряжением , вызывает изменение угла управления при малом уровне входного сигнала (от оС i 12О° до ыэС 9О°) в соответствии с участком а ,, характеристики (см. фиг. 3) и при дальнейрем увеличении напряжения У ув сторону меньших углов и большего выпрямленного напряжения U, по закону, определяемому параметрами системы регулирования и линейной регулировочной характеристикой систек ы фазового управления (см. фиг. З). Изменение угла управления от 12О до 90° при незначительном уровне напряжения jU обеспечивает быстрое прохождение зоны прерывистых токов и высокую скорость нарастания тока разгона двигателя. При появлении эл.с. двигателя с выхода датчика эл.с. снимается сигнал на вход ключевого элемента 1О. Этим сигналом осуществляется запирание транзистора элемента 10, в связи с чем порог срабатывания фиксатора на входе преобразователя 19 (см. фиг. 2) увеличивается до 2 .Ug , что приводит к линейной зависимости угла управления .от величины сигнала управления (см. фиг, 3 характеристика для /Е/ О).
Эта характеристика соответствует линей ному согласованию регулировочных характеристик групп тиристоров преобразователя при котором углы управления группами otj и с связаяы уравнением или оС р и обеспечиваются близкие по значениям э.д.с. выпрямителя и э.д.с. инвертора и и . Линейное согласование харак теристик обеспечивает бьютрое нарастание тормозного тока двигателя.
При установлении двигателя в режим хо лостого хода при каком-либо значении скорости в связи с несоответствием среднего оидчения выпрямле 1ного напряжения преобрааоватеяя и эл.с. двигателя происходит увеличение скорости выше заданной, что п зиводит к измененшо знака выходного напряжения регулятора скорости и благодаря переключению ЛПУ к включению инвертор кой группы преобразователя.
Снижение скорости за счет включения шшерторной группы вновь вызывает включение выпрямительной группы преобразователя. Следовательно, в режимэ холостого 5Ьда через двигатель в связи с линейным согласованием характеристик и высокой ствительностью ЛПУ устанавливается знахо переменный начально-непрерывный ток и, следовательно, зона прерывистых токов существенно уменьшается.
Уменьшение зоны прерывистых токов обеспечивает высокое качество переходных
процессов, равноценных процессам в режиме непрерывного тока. При этом настройка системы регулирования осушествляется по принятому техническому оптимуму, начальный угол управления (точка а на фиг, З) для
повышения помехозащищенности должен быть более 12О°,
Формула изобретения
Система управления реверсивным тирио« торным электроприводом, содержащая регулятор скорости и регулятор тока с подключенными к их входам соответственно датчиками Э.Д.С. и тока двигателя, логическое
Переключающееустройство, подкгабченное вхск
дом к выходу регулятора скорости и через датчик проводящего состояния тиристоров - к тиристорам преобразователя, одноканальную 0 систему фазового управления, подклю1Ченную первым и вторым входами через аналоговые ключи к выходу регулятора тока и связанную с группами тиристоров преобразователя через выходные устройства, цепи включения которых объединены с цепями включения аналоговых ключей и подключены к выходам ,логического переключакицего устройства, отличающаяся тем, что, с целью обеспечения устойчивой нулевой скорости вращения двигателя и повышения качества переходных процессов, к выходу датчика эл.с. подключен выпрямитель. Выход которого через кшочевой элемент соединен с третьим входом системы фазового управления,
источники информации, принятые во внимание при экспертизе:
1.Автоматика и телемеханика № 11,
1964, с. 16О1Г
2.Шипшшо В, П. Автоматизированный
вентильный электропривод Энергия, 1969, с, 343.
3.Поздеев А. Д, и др. Припшшы пост5 роения структур вентильного электролфивода
постоянного тока. Труды ВНИИР, вып. 4, 1974 (гфототип).
в /Tl А tf
I2У
«X itfy т
U(UH-tVy)K-(/o IfpuzJЛ


| название | год | авторы | номер документа |
|---|---|---|---|
| Вентильный электропривод постоянного тока | 1984 |
|
SU1492438A1 |
| Устройство для раздельного управления реверсивным тиристорным преобразователем | 1976 |
|
SU608250A1 |
| Способ управления реверсивным тиристорным электроприводом | 1975 |
|
SU603079A1 |
| Тиристорный электропривод постоянного тока | 1978 |
|
SU771836A1 |
| РЕВЕРСИВНЫЙ ТИРИСТОРНЫЙ ЭЛЕКТРОПРИВОД | 1992 |
|
RU2079963C1 |
| Электропривод с раздельным управлением | 1989 |
|
SU1817220A1 |
| РЕВЕРСИВНЫЙ ТИРИСТОРНЫЙ ЭЛЕКТРОПРИВОД | 1995 |
|
RU2103797C1 |
| Реверсивный тиристорный электро-привод постоянного тока | 1973 |
|
SU509966A1 |
| Устройство фазового сдвига импульсов для управления тиристорным преобразователем | 1975 |
|
SU547936A2 |
| Вентильный электродвигатель | 1978 |
|
SU775831A2 |


