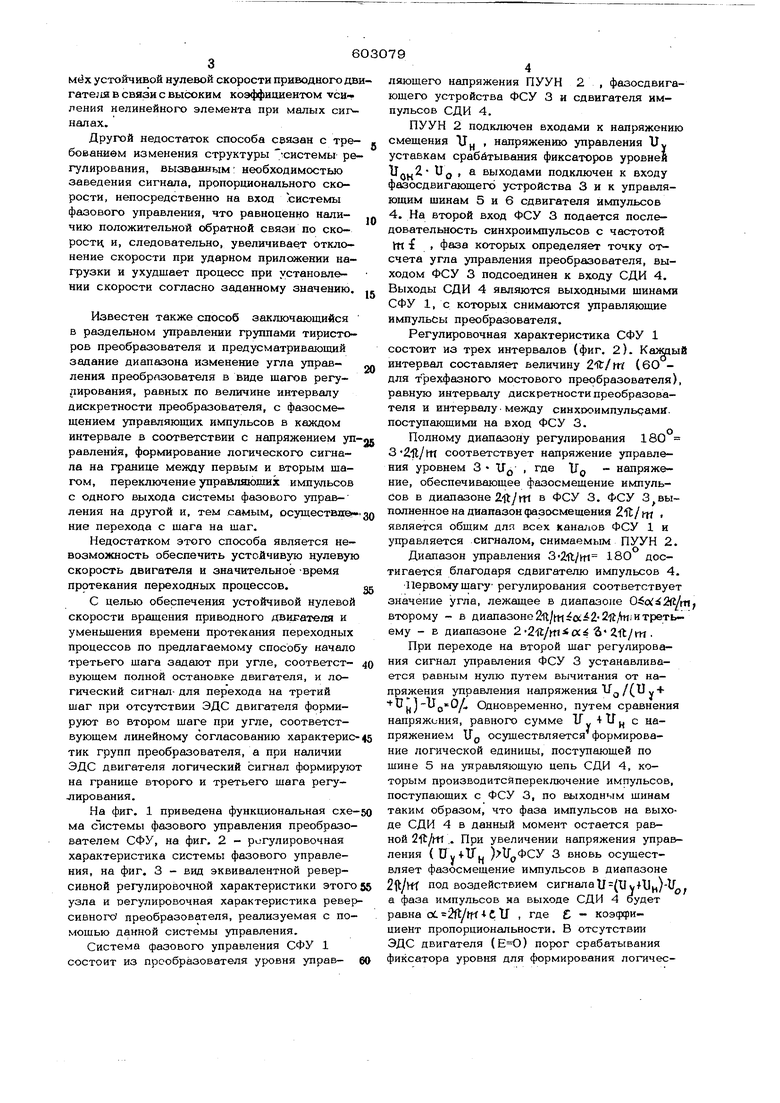
мех устойчивой нулевой скорости приводного дв rareiLZ в связи с высоким коэффициеитом vca ления нелинейного элемента при малых сипналах. Другой недостаток способа связан с требованием изменения структуры -системы ре гулирования, вызванным: необходимостью заведения сигнала, пропорционального скорости, непосредственно на вход системы фазового управления, что равноценно наличию положительной обратной связи по ско- ростц и, следовательно, увеличивает отклонение скорости при ударном приложении нагрузки и ухудшает процесс при установлении скорости согласно заданному значению. Известен также способ заключающийся в раздельном управлении группами тиристоров преобразователя и предусматривающий задание диапазона изменение угла управления преобразователя в виде шагов регулирования, равных по величине интервалу дискретности преобразователя, с фазосмещением управляющих импульсов в каждом интервале в соответствии с напряжением yn равления, формирование логического сигнала на границе между первым и вторым щагом, переключение управляющих импульсов с одного выхода системы фазового управления на другой и, тем самым, осуществле ние перехода с щага на шаг. Недостатком этого способа является невозможность обеспечить устойчивую нулевую скорость двигателя и значительное -время протекания переходных процессов. С целью обеспечения устойчивой нулевой скорости вращения приводного двигателя и уменьшения времени протекания переходных процессов по предлагаемому способу начало третьего шага задают при угле, соответствующем полной остановке двигателя, и логический сигнал- для перехода на третий шаг при отсутствии ЭДС двигателя формируют во втором шаге при угле, соответствующем линейному согласованию характерис тик групп преобразователя, а при наличии ЭДС двигателя логический сигнал формирую на границе второго и третьего шага регулирования. На фиг. 1 приведена функциональная cxeма с истемы фазового управления преобразователем СФУ, на фиг. 2 - регулировочная характеристика системы фазового управления, на фиг. 3 - вид эквивалентной ревер сивной регулировочной характеристики этого узла и регулировочная характеристика ревер сивногс преобразователя, реализуемая с помощью данной системы управления. Система фазового управления СФУ 1 состоит из преобразователя уровня управляющего напряжения ПУУН 2 , фазосдвигающего устройства ФСУ 3 и сдвигателя импульсов СДИ 4. ПУУН 2 подключен входами к напряжению смещения 11. , напряжению управления Uy уставкам срабйтывания фиксаторов уровней UQ , а выходами подключен к входу фазосдвигающего устройства 3 и к управляющим шинам 5 и 6 сдвигателя импульсов 4. На второй вход ФСУ 3 подается последовательность синхроимпульсов с частотой Itt . фаза которых определяет точку отсчета угла управления преобразователя, выходом ФСУ 3 подсоединен к входу СДИ 4. Выходы СДИ 4 являются выходными шинами СФУ 1, с которых снимаются управляющие импульсы преобразователя. Регулировочная характеристика СФУ 1 состоит из трех интервалов (фиг. 2). Каждый интервал составляет величину 2ft/ttif (6О для трехфазного мостового преобразователя), равную интервалу дискретности преобразователя и интервалу между синхооимпульрамиг, поступающими на вход ФСУ 3. Полному диапазону регулирования 3 211/ ttl соответствует напряжение управления уровнем 3 MQ , где Up - напряжение, обеспечивающее фазосмещение импульСов в диапазоне 211/111 в ФСУ 3. ФСУ 3 выполненное на диапазон диэосмещения 211/ iti , является общим длл всех каналов ФСУ 1 и управляется сигналом, снимаемым ПУУН 2. Диапазон управления 32ll/tti 180 достигается благодаря сдвигателю импульсов 4. Первому шагу регулирования соответствует значение угла, лежащее в диапазоне (Z/rrr; второму - в диапазоне211/Н1 ос 221г,1Итретьему - в диапазоне 2-2{t/m(X Ъ2.-(t/m . При переходе на второй шаг регулирования сигнал управления ФСУ 3 устанавливается равным нулю путем вычитания от напряжения управления напряжения (U у+ -U j-11д ОД Одновременно, путем сравнения напряжения, равного сумме 1Г 411 с напряжением 1Гд осуществляется формирование логической единицы, поступающей по щине 5 на управляющую цепь СДИ 4, которым производитсяпереключение импульсов, поступающих с ФСУ 3, по ш 1ходным шинам таким образом, что фаза импульсов на выходе СДИ 4 в данный момент остается равной 2ft/rt1 .. При увеличении напряжения управления { Uy+IIj )и(,ФСУ 3 вновь осуществляет фазосмещение импульсов в диапазоне 2ft/Ht под воздействием сигналаи(,)-и, а фаза импульсов на выходе СДИ 4 будет равна oC 2fl:/fK Clr , где , - коэффициент пропорциональности. В отсутствии ЭДС двигателя () порог срабать вания фиксатора уровня для формирования логичесKsro сигнала на управляющей шине b устанавливается равным 1,5 11 . Порог задается с помощью потенциометра 7 при насыщенном транзисторе 8 (фиг. 1), на вход которого подается сигнал, пропорциональный модулю ЭДС /Е/ . В этом случае напряжение управления равно нулю, фаза импульсов на СПИ 4 в связи с наличием логической единицы на шине Ь равна 0 2-2fl/m (Н ) соответствует точке А на характеристике (фиг. 2). Как видно из фиг. 2 характеристика СФУ 1 в отсутствии ЭДС двигателя имеет ломанный участок ABC в окрестности углов 9О -120 Таким образом, фаза импульсов на выходе СДИ 4 задается в виде дискретной части, равной 2lt/Ki и непрерывной части, равной о IT J причем дискретная часть реализуется благодаря СДИ 4, а непрерывная часть - благодаря ФСУ 3. Такой способ преобразования напряжения управления в величину угла управления обеспечивает одноканальность фазового сдвига импульсов, максимальное быстродействие ФСУ 3 и исключает потерю информации в динамическом режиме в ФСУ 3, что дает возмоз ность применить один комплект системы фа зового управления для выработки управляющих импульсов двух групп тиристоров преобразователя при их поочередном управлении с наименьшей величиной бестоковой паузы при переключении групп тиристоров. Начальный угол регулирования, задаваемый 1Гц и соответствующий точке . А на характеристике (фиг. 2), выбирается из ус
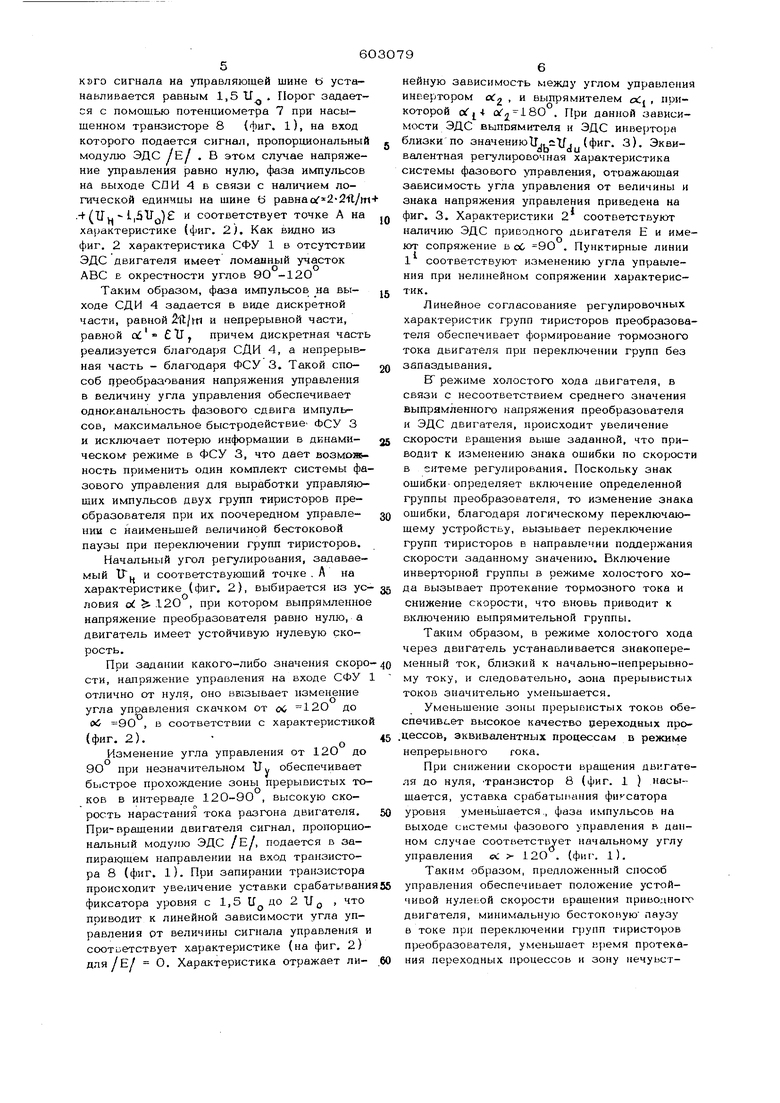
ловия oi i 12О , при котором выпрямленное напряжение преобразователя равно нулю, а двигатель имеет устойчивую нулевую скорость. При задании какого-либо значения скоро сти, напряжение управления на входе СФУ отлично от нуля, оно ВБ13ывает изменение угла управления скачком от о(, 120 до об 9О , в соответствии с характеристико (фиг. 2). Изменение угла управления от 120 до 9О° при незначительном Ui, обеспечивает быстрое прохождение зоны прерывистых токов в интервале 120-90 , высокую скорость нарастания тока разгона двигателя. При-вращении двигателя сигнал, пропорциональный модулю ЭДС /Е/, подается в запирающем направлении на вход транзистора 8 (фиг. 1). При запирании транзистора происходит уве шчение уставки срабатывани фиксатора уровня с 1,5 Lf до 2 и о , что приводит к линейной зависимости угла управления от величины сигнала управления и соответствует характеристике (на фиг. 2) для /Е/ О. Характеристика отражает лиснижение скорости, что вновь приводит к включению выпрямительной группы.
Таким образом, в режиме холостого хода через двигатель устанавливается знакоперенейную зависимость между углом упраЕ5ления инвертором ofg . и выпрямителем «:, , прикоторой arj -i80°. При данной зависимости ЭДС выпрямителя и ЭДС инвертора близки по значению1Г ;Х(фиг. 3). Эквивалентная регулировочная характеристика системы фазового управления, отражающая зависимость угла управления от величины и знака напряжения управления приведена на фиг. 3. Характеристики 2 соответствуют наличию ЭДС приводного двигателя Е и имеют сопряжение в с6 90 . Пунктирные линии 1 соответствуют изменению угла управления при нелинейном сопряжении характерис™кЛинейное согласованияе регулировочных характеристик групп тиристоров преобразователя обеспечивает формирование тормозного тока двигателя при переключении групп без запаздывания. и режиме холостого хода двигателя, в связи с несоответствием среднего значения выпрямленного напряжения преобразователя и ЭДС двигателя, происходит увеличение слорости вращения выше заданной, что приводит к изменению знака ошибки по скорости в ептеме регулирования. Поскольку знак ошибки-определяет включение определенной группы преобразователя, то изменение знака ошибки, благодаря логическому переключающему устройству, вызывает переключение групп тиристоров в направлении поддержания скорости заданному значению. Включение инверторной группы в режиме холостого хода вызывает протекание тормозного тока менный ток, близкий к начально-непрерывному току, и следовательно, зона прерывистых токов значительно уменьшается. Уменьшение зоны прерывистых токов обеспечнв.ет высокое качество цереходных процессов, эквивалентных процессам в режиме непрерывного гока. При снижении скорости вращения двигателя до нуля, Транзистор 8 (фиг. 1 ) насыщается, уставка срабатыкания фиксатора уровня уменьшается., фаза импульсов на выходе системы фазового управления в данном случае соответствует начальному углу управления ct 12О . (фиг 1). Таким образом, предложенный способ управления обеспечивает положение устойчивой нулевой скорости вращения привоаногх двигателя, минимальную бестоковую паузу в токе при переключении групп тиристоров преобразователя, уменьшает время протекания переходных, процессов и зону нечуьствительности в регулировочной характеристике преобразователя.
Формула изобретенияСпособ управления реверсивным тиристорным электроприводом при раздельном управлении группами тиристоров преобразователя, состоящий в задании диапазона изменения угла управления преобразователя в виде шагов регулирования, равных по величине интервалу дискретности преобразовагеля, с фазосмещением управляющих импульсов в каждом интервале в соответствии с напряжением управления, формированием логического сигнала на границе между первым
и вторым шагом, переключением управляющих импульсов с одного выхода системы фазового управления на другой, и тем самым, осуществлением перехода с шага на шаг, отличающийся тем, что, с целью получения устойчивой нулевой скорости двигателя и уменьшения времени протекания переходных процессов, начало третьго щага задают при угле, соответствующем полной остановке двигателя, и логический сигнал для перехода на третий шаг при отсутствии ЭДС двигателя формируют во втором щаге при угле, соответствующем линейному согласованию хар 1ктеристик групп преобразователя, а при наличии ЭДС двигателя - на границе между вторым и третьим шагом регулирования.

| название | год | авторы | номер документа |
|---|---|---|---|
| Система управления реверсивным тиристорным электроприводом | 1975 |
|
SU566293A1 |
| Устройство для раздельного управления реверсивным тиристорным преобразователем | 1976 |
|
SU608250A1 |
| Устройство фазового сдвига импульсов для управления тиристорным преобразователем | 1975 |
|
SU547936A2 |
| Способ управления асинхронным электродвигателем с частотно-импульсным регулированием напряжения | 1988 |
|
SU1653122A1 |
| Способ управления тиристорнымпРЕОбРАзОВАТЕлЕМ и уСТРОйСТВОдля ЕгО ОСущЕСТВлЕНия | 1979 |
|
SU824398A1 |
| Вентильный электродвигатель | 1973 |
|
SU660158A1 |
| СПОСОБ УПРАВЛЕНИЯ ТИРИСТОРАМИ В РЕВЕРСИВНОМ ТРЕХФАЗНОМ ТИРИСТОРНОМ ЭЛЕКТРОПРИВОДЕ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2010 |
|
RU2498493C2 |
| Способ управления регулятором напряжения трансформатора под нагрузкой и устройство для его осуществления | 1983 |
|
SU1132336A1 |
| СПОСОБ КОМПЛЕМЕНТАРНО-ФАЗОВОГО УПРАВЛЕНИЯ РЕВЕРСИВНЫМ ВЕНТИЛЬНЫМ ПРЕОБРАЗОВАТЕЛЕМ | 2010 |
|
RU2414801C1 |
| Реверсивный тиристорный электро-привод постоянного тока | 1973 |
|
SU509966A1 |
I
uij
a (эл. грай
Ua
