Наиболее близким к предлагаемому эластовискозиметру является устройство, где, кроме элементов и функциональных связей, включены дололнительно измеритель скорости перемещения штока, формирователь сигнала вязкости, обратный преобразователь вязкости и исполнительное устройство канала вязкости, которое своим выходом соединено со входом обмотки статора обратного преобразователя вязкости, а его вход связан с выходом формирователя сигнала вязкости, входы которого связаны с выходами измерителя скорости перемещения щтока и датчика Силы сопротивления при деформации исследуемого вещества 2, т. е. здесь, помимо канала параметрической компенсации упругих свойств, сформирован канал параметрической компенсации вязких свойств вещества.
Со -стороны обратного .преобразователя ;вязкости на щток действует сила, пропорциональная величине вязкости к скорости деформации, которая направлена встречно силе сопротивления движению штока, обусловленной вязкими свойствами исследуемого вещества. Знак действующей со стороны обратного преобразователя силы определяется знаком тока в обмотке статора при заданной скорости перемещения щтока, .величина и знак которой определяются измерителем скорости перемещения штока, электрически связанным с обмоткой якоря обратного преобразователя вязкости. Сигнал, пропорциональный вязкому сопротивлению вещества, формируется в формирующем устройстве, представляющем собой множительное устройство, входы которого связаны с выходами измерителя скорости перемещения щтока и датчика силы сопротивления вещества, а .выход - с исполнительным устройством, выполненным в виде интегратора. Если на заданной частоте колебаний в каждый момент времени сила, действующая на шток со стороны о братного преобразователя вязкости, равна по величине и обратиа по знаку силе вязкого сопротивления, то сигнал на выходе формирующего устройства будет равен нулю, а на .выходе интегратора будет ток, величина которого пропорциональна вязкости веществ.
Если вязкость исследуемого вещества изменится, то изменится сила сопротивления движению штока, а это вызовет изменение амплитуды и фазы его вынужденных колебаний, т. е. изменение сигнала на выходе формирующего устройства, которое вызовет изменение величины тока на .выходе интегратора в таком направлении, чтобы вызвать соответствующее изменение силы со стороны обратного преобразователя до тех пор, пока она не скомпенсирует изменения силы вязкого сопротивления вещества, а это в свою очередь обусловит равенство нулю сигнала на выходе формирующего устройства. Вязкостные свойства всей электромеханической системы, куда в качестве ее элемента входит исследуемое вещество, остаются постоянными, т. е. ее амплитудная и фазовая частотная характеристики будут неизменными при любых значениях вязкости вещества. Предел ее измерения будет определяться только мощностными характеристиками обратного преобразователя.
Таким образом, использование двух каналов параметрической компенсации - канала упругости и канала вязкости-позволяет обеспечить одновременное измерение модуля упругости вещества и его вязкость, повысить точность измерений за счет ликвидации взаимного влияния измеряемых параметров. Однако пробные периодические движения
со стороны привода устройства передаются веществу через вспомогательную пружину и щток, что обуславливает наличие дополнительных инерционных сил, которые зависят как от приведенной массы перемещающихся
частей, так и от ускорения. Их значительная величина затрудняет выделение сил, обусловленных вязкой и упругой составляющей модуля вещества, что приводит к снижению точности измерений. Этот недостаток особенно
сильно проявляется при измерении .малых вязкостей и модулей упругости вещества.
Кроме того, при заданной частоте лрО|бных колебаний приводом на выходе формирователя сигнала вязкости и формирователя сигнала упругости при отсутствии в кювете вещества всегда будет иметь место сигнал, который обусловлен со:бствеиным:и .динамическими характеристиками механической части прибора. Изменение частоты пробных колебаНИИ приведет к изменению величины этих сигналов. Поэтому при исследовании вещества в широком частотиом диапазоне всякий раз при смене частоты пробных колебаний необходимо проводить настройку устройства, что
также отражается на точности измерений.
Целью изобретения является повышение точности измерений и чувствительности при измерении малых значений модуля упругости и вязкости веществ.
Указанная цель достигается тем, что кювета с исследуемым веществом установлена на платформе, связанной с приводом, на .которой укреплены магнитопроводы обратных преобразователей упругости и вязкости, статор датчика перемещений штока и статор измерителя скорости его перемещения, а статор датчика усилия закреплен на корпусе устройства, при этом выходы формирователей сигналов упругости и вязкости связаны со входами исполнительных блоков каналов упругости и вязкости через фильтрующие устройства, настроенные на заданную частоту колебаний платформы.
Так как пробные воздействия передаются со стороны платформы, то это позволяет исключить влияние дополнительных инерционных сил на точность измерений и чувствительность. А амплиту.да и фаза колебаний
штока будут зависеть только от динамических свойств механической системы и величин измеряемых параметров.
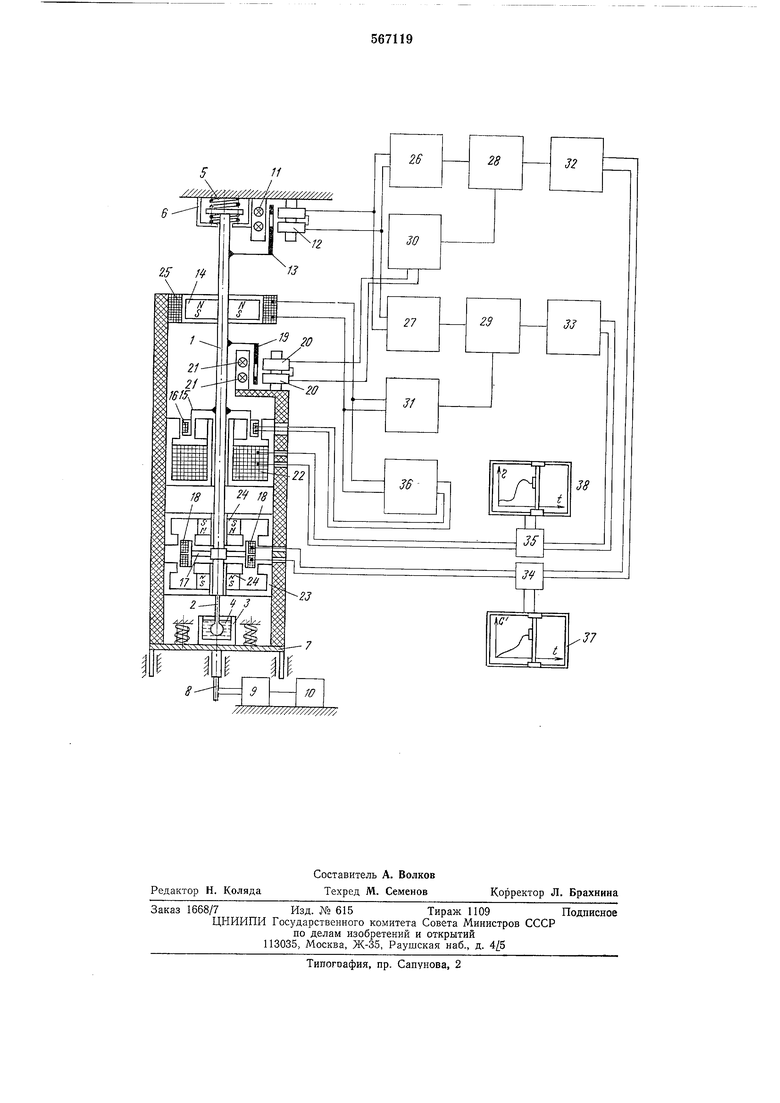
На чертеже .приведена принципиальная схема предлагаемого вискозиметра.
Он содержит шток 1, заканчивающийся сменным зондом 2, погруженным в .кювету 3 с исследуемым веществом 4. Другой конец штока через вспомогательную пружину 5 и втулку 6 связан с корпусом прибора (на чертеже показан штриховкой). Платформа 7 с установленной на ней кюветой 3 совершает колебательное движение заданной амплитуды и частоты С помощью кулачка 8, связанного С блоком изменения частоты «олебаний 9 с приводом 10.
На корпусе прибора установлен статор датчика усилия, выходная координата которого пропорциональна усилию сопротивления деформации исследуемого вещества, включаюший электрические лампочки 11 и фотодиоды 12.
На штоке 1 укреплены: шторка 13 датчика усилия, якорь 14 измерителя скорости перемещения штока (скорости изменения усилия), выполненный в виде постоянного магнита, якорь обратного преобразователя вязкости, выполненный в виде легкого каркаса 15 с катушкой 16, якорь обратного преобразователя упругости, выполненный в виде легкого каркаса 17 С катушкой 18, шторка 19 датчика относительного перемещения штока 1.
На платформе 7 закреплены статор датчика перемещения щтока, включающий фотодиоды 20 и электрические лампочки 21, .магнитопровод обратного преобразователя вязкости с катушками 22, магнитопровод о братного преобразователя упругости 23 с постоянными магнитами 24 и статор измерителя скорости относительного перемещения щтока, выполненный в виде катущки 25. Первый и второй выходы датчика усилия 12 электрически связаны соответственно со входами усилителей 26 и 27, причем выход усилителя 26 связан с первым входом формирователя сигнала упругости 28, а выход усилителя 27- с первым входом формирователя сигнала вязкости .29, вторые входы которых связаны через усилители 30 и 31 с выходами датчика относительного перемещения 20 и первым выходом измерителя скорости относительного перемещения 25 соответственно, а их выходы связаны с фильтрующими устройствами 32 и 33, .выходы которых связаны соответственно со входами исполнительных блоков 34 канала упругости 35 и канала вязкости, первые выходы которых ПО каналу упругости связаны со входом катущки 18 обратно.го преобразователя TipyrocTn, а по каналу вязкости - со входом катушки 22 обратного преобразователя вязкости, а второй -выход измерителя скорости относительного перемещения .25 связан со входом усилителя 36, выход которого соединен со входом катушки 16 якоря обратного преобразователя .вязкости. Вторые выходы исполнительных блоков 34 и 35 соединены соответственно со входами регистратора 37 модуля упругости и регистратора 38 вязкости. Устройство работает следующим образом.
Колебания платформы 7 с фиксированной амплитудой, величина которой определяется профилем кулачка 8 и частотой, устанавливаемой в блоке изменения частоты 9 от привода 10, вызывают колебания закрепленных на ней кюветы 3, магнитопровода обратного преобразователя вязкости с катушкой 22, магнитопровода обратного преобразователя упругости 23 и статора датчика отно.сительного
перемещения, включающего фотодиоды 20 и датчики 21.
При отсутствии вещества 4 в кювете 3 шток 1 с закпепленными на нем элементами будет неподвижен. Это обуславливает отсутствие сигнала на выходах формирователя сигнала упругости 28 и формирователя сигнала вязкости 29, представляющих собой множительные устройства, первые входы которых чег1ез усилители 26 и 27 соответственно связаны с пепвым и вторым выходами датчика усилия, сигналы которых отсутствуют.
Слеповательно, булет отсутствовать ток в катушке 18 обоатного ппеобпазователя упругости и в катушке 22 обратного ппеобпазователя вязкости, своими входами связанными соответственно с первыми выходами исполнительных блоков 34 и 35. представляющих собой интегрирующие устройства, входы которых чепез соотяетствуюш.ие фильтрующие
Устройства 32 и 33 связаны с формиповатрлей сигна.пов упругости 28 и вязкости 29. На выходах усилителя 30. вход которого связан с выходом датчика относительного перемешения. усилителей 31 и 36. своими входами связанных с выходами измерителя 25 СКОРОСТИ относительного перемешения штока, будут сигналы, величина КОТОРЫХ поопорииональна амплитуде колебаний платформы 7. Отсутствие тока на ВТОРЫХ выходах исполнительных блоков 34 и 35 определит начальные точки отсчета модуля ЛТТРУГОсти и вязкости в их регистраторах 37 и 38. входы которых соединены со вторыми выходами соответствующих интеграторов. Наличие вещества 4 тз кювете 3 вызовет колебание штока и всех связанных с ним элементов с частотой колебаний кюветы, но амплитуда и фаза этих колебаний будут определяться вязкими и упругими свойствами вещества 4.
Если вещество обладает чисто упругими свойствами, то амплитуда и фаза колебаний штока будут зависеть от динамических свойств механической системы и величины модуля упругости вещества. Сигнал с выходом датчика усилия через уси.лители 26 и 27 постгттит на первые входы формирователя сигнала 28 и сигнала вязкости 29. На второй вход формирователя сигнала упругости 28 через усилитель 30 постоит сягкал с выхода датчика отност тельного перемещения ;штока, а на второй вход .формирователя сигнала вязкости 29 через усилитель 31 поступит сигнал, сдвинутый на я/2 по отношению к лервому (с первого выхода измерителя скорости относительного перемещения 25).
Таким образом, на выходе формирователя сигнала упругости 28 выделится сигнал, пропорииональный активной составляющей реакции вещества на деформапию, т. е. модулю упругости, а на выходе формирователя сигнала вязкости 29 сигнала не будет, так как веществе обладает чисто упругими свойствами. Через фильтр 32, входом связанный с выходом формирователя сигнала упругости 28 и настроенный на заданную частоту (устройства перенастройки диапазонов фильтрации фильтров 32 и 33 на чертеже не показаны), выходной сигнал формирователя .поступит на вход исполнительного блока 34, выходной сигнал первого выхода которого изменит ток в катушке 18 обратного прео|бразователя упругости, а выходной сигнал его второго выхода изменит положение пера регистратора 37, выполненного в виде двухкоординатного планшетного потенциометра. Ток в катушке 18 обратного преобразователя упругости создает магнитный поток, который, взаимодействуя с магнитным .потоком статора обратного преобразователя упругости 23, создаваемото постоянными магнитами 24, вызовет появление усилия, обратного то знаку усилию сопротивления исследуемого вещества деформации, а по величине пропорционального току в катушке 18 обратного преобразователя упругости. Ток Б обмотке катушки 18 будет изменяться до тех пор, пока разность силы реакции исследуемого вещества «а деформацию и силы, создаваемой обратным преобразователем, не станет равной нулю.
При этом ,шток остановится и сигнал на выходе формирователя сигнала упругости 28 станет равным нулю. На первом и на втором выходах исполнительного блока 34 установится TOiK; величина которого пропорциональна модулю упругости, который с одной стороны вызывает усилие, действующее на якоре 17 обратного лреобразователя 23, а следовательно, и на штоке 1, равное по величине и обратное по знаку усилию сопротивления исследуемого вещества деформации, а с другой,- отклонение пера р&тт-гстратора 37 на величину, пропорциональную модулю ;упругости вещества.
Если вещество обладает чисто вязкими свой1ствами, то амплитуда и фаза колебаний штока будут зависеть от динамических свойств механической системы и величины вязкости вещества. Сигнал с выходов датчика усилий изменится по ам плит}де и по фазе сдвигается на угол я/2, поэтому сигнал на выходе формирователя сигнала вязкости 29 будет 11,)опорционален реактивной составляющей модуля вещества на заданной частоте его деформации - его вязкости.
Сигнал с выхода формирователя сигнала вязкости 29 через фильтрующее устройство 33, настроенное на заданную частоту, .наступает на вход исполнительного блока 35 канала вязкости, сигнал с первого выхода которого изменит ток в обмотке катушки 22 обратного преобразователя вязкости, сигнал на катушку 16 якоря которого поступает с выхода усилителя 36, вход котортто связан со вторым выходом катушки 25 измерителя скорости относительного перемещения штока. Знак и величина силы, возникающей в каждый момент времени на якоре 15 обратного преобразователя вязкости за счет взаимодействия
магнитных полей катушки 22 и катушки 16, зависят от величины и знака тока в катушке 22 и величины и фазы тока в катушке 16, которые подключены своими входами к выходам исполнительного блока 35 и усилителя
36 таким образом, что знак этой силы обратен знаку силы вязкостного трения И1сследуемого веш.ества, а ее величина зависит от величины тока в катушке 22 обратного преобразователя вязкости. Таким образом, ток с
выхода исполнительного блока 35 канала вязкости пропорционален вязкости исследуемого вещества и будет изменяться до тех пор, пока сила, действующая на шток со стороны якоря 15 обратного преобразователя
вязкости не станет равной силе вязкостного сопротивления вещества.
Когда шток остановится, сигнал на выходе формирователя сигнала вязкости 29 станет равным нулю, а на первом выходе иополнительного блока 35 будет ток, величина которого пропорциональна вязкости, второй выход которого изменит положение пера регистратора 38 вязкости, зафиксировав величину, пропорциональную вязкости исследуемого
.вещества.
Е|с.ли исследуемое вещество Обладает как вязкими, так и шругими свойствами, фаза и амтглитуда выходного сигнала датчика усилия, поступающего на входы усилителей 26 и
27, пропорциональны как вязкости, так и упругости. Следовательно, на первых входах формирователей сигнала упругости 28 и сигнала вязкости 29 будут сигналы, амплитуда и фаза которых обусловлены как вязкими, так
и упрзтими свойствами 1вещества, а на другие входы этих формирователей лодаю-тся сигналы с выхода усилителей 30 и 31, которые своими входами связаны соответственно с выходами датчика относительного перемещения и
первым выходом измерителя скорости относительного перемещения 25, сигналы с которых сдвинуты по фазе на угол я/2, поэтому на выходах формирователей сигнала упругости 28 и сигнала вязкости 29 выделяются
сигналы, пропорциональные активной составляющей комплексного модуля, т. е. модулю упругости и его реактивной -составляющей- вязкости соответственно.
Эти сигналы, цройдя фильтрующие устройства 32 и 33, своими входами связанные с
9
выходами формирователей 28 и 29, а выходами - с иополнительнымл блоками 34 и 35, вызовут соответствующее изменение тока в обмотке катушки 18 обратного преобразователя упругости и в обмотке катушки 22 обратного преобразователя вязкости в такую сторону и до тех пор, пока силы, возникаюш,ие от взаимодействия полей этих катушек с магнитными полями соответственно постоянныХ магнитов 24 обратного преобразователя упругости и катушки 16 якоря лрео-бразо1вателя вязкости не скомпенсируют силы сопротивления деформации исследуемого вешества, обусловленные его упругими и вязкими свойствами, что приведет к остановке штока 1 и изменению положения перьев регистраторов 37 и 38, которые зафиксируют величину модуля упругости и вязкость веш:ества, соответствуюшие заданной частоте деформации.
Так как отсутствие вещества 4 в кювете 3 определяет исходное состояние устройства, т. е. точку его настройки, которая фиксируется перьями регистраторов, то изменение их положения, вызванное наличием .вешества 4 в кювете 3, имеюш,его определенные вязкоупругие свойства, определит абсолютные (а не относительные) значения модуля упругости и вязкости вещества.
Смена зонда 2 расширяет .метрологические возможности устройства, так как приводит к изменению коэффициента формы. Для каждого зонда определяется масштаб шкалы регистраторов 37 и 38 по эталонным вещест(вам.
Устройство позволяет повысить точность Измерений при снятии релаксационных спектров вешеств в широком диапазоне изменения частоты пробных воздействий без перенастройки прибора. Принцип измерения параметров, заложенный в устройстве, может быть использован для анализа физических параметров топлива в процессе эксплуатации энергетических установок и для управления различными технологическими процессами.
10
Формула изобретения Вибрационный эластовискозиметр для определения реологических характеристик веществ, содержащий корпус, кювету с исследуемым веществом, щток со сменным зондом, подгруженным в исследуемое вещество, привод, блок изменения частоты колебаний, связанный с приводом, датчик усилия, развиваемого исследуемым веществом при деформации, датчик перемещения и измеритель скорости перемещения штока, обратные преобразователи упругости и вязкости, якори которых связаны со штоком, формирователи сигналов упругости и вязкости, иополнительные блоки каналов упругости и вязкости, входы которых связаны с выходами формирователей сигналов упругости и вязкости, первые входы которых связаны с выходами датчика усилия, а вторые входы - с выходом датчика перемещения щтока и одним выходом измерителя скорости его перемещения, другой выход которого связан со входом катушки обратного преобразователя вязкости, а выходы исполнительных блоков связаны с катущками обратных преобразователей упругости и вязкости, отличающийся тем, что, с целью повышения точности измерений и чувствительности при измерении малых значений модзля упругости и вязкости веществ, в нем
кювета с исследуемым веществом установлена ка платформе, связанной с приводом, на которой укреплены магнитопроводы обратных преобразователей упругости и вязкости, статор датчика перемещений штока и статор измерителя скорости его перемещения, а статор датчика усилия закреплен на корпусе устройства, причем выходы формирователей сигналов упругости и вязкости связаны со входами исполнительных блоков каналов упругости и
вязкости через фильтрующие блоки, настроенные на заданную частоту колебаний платформы.
Источники информации, принятые во внимание при экспертизе
1. Авторское свидетельство СССР N° 507805, «л. G 01N 11/14, 1974.
2. Патент ,США № 3722262, кл. 73-54, 1973.



| название | год | авторы | номер документа |
|---|---|---|---|
| Способ определения реологических характеристик веществ и устройство для его реализации | 1976 |
|
SU864062A1 |
| Устройство для измерения вязкоупругих характеристик сред | 1977 |
|
SU687377A1 |
| Эластовискозиметр | 1982 |
|
SU1080070A1 |
| Устройство для измерения вязкоупругих характеристик веществ | 1977 |
|
SU708201A1 |
| Устройство для измерения реологических характеристик вязкоупругих сред | 1977 |
|
SU708202A1 |
| Вибрационный измеритель реологических характеристик веществ | 1978 |
|
SU777556A1 |
| Эластовискозиметр | 1979 |
|
SU828020A1 |
| Эластовискозиметр | 1980 |
|
SU890151A1 |
| Эластовискозиметр | 1979 |
|
SU993102A2 |
| Устройство для определения реологических характеристик жидкости в потоке | 1976 |
|
SU655933A1 |