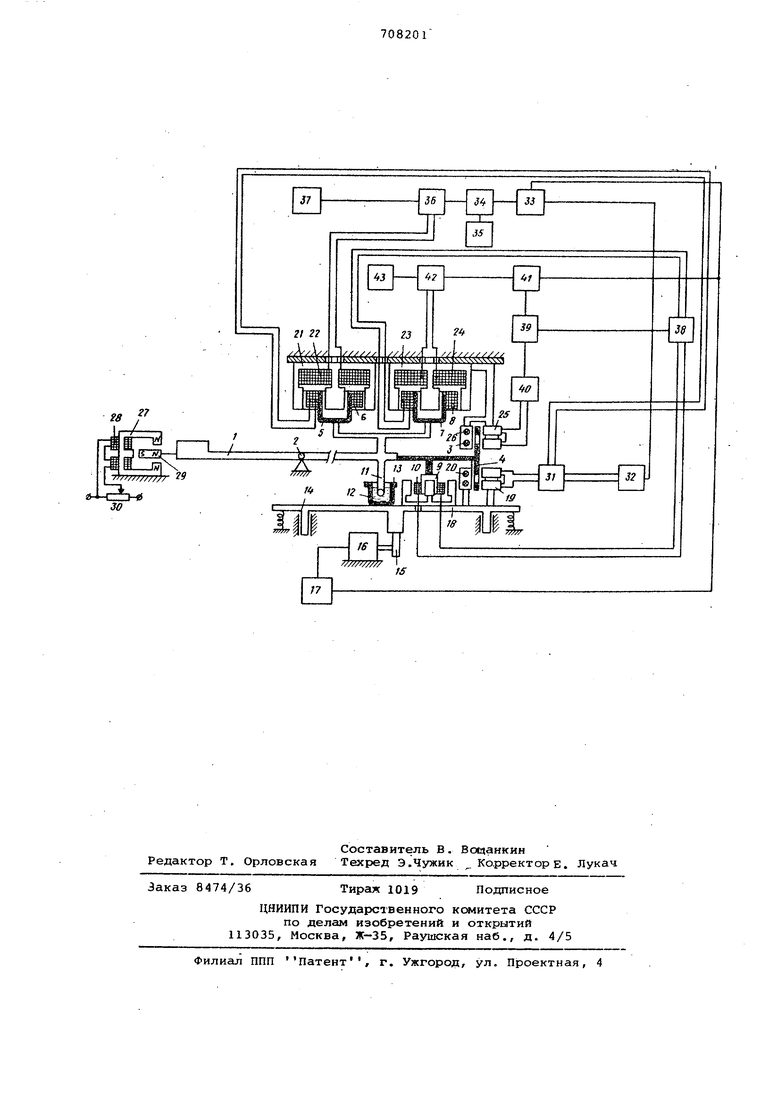
с выходом датчика перемещения штока и одним выходом измерителя скорости его перемещения, другой выход которого связан со входом катушки обратного преобразователя вязкости. Выходы исполнительных блоков связаны с катушками обратных преобразователей модуля упругости и влзкости. Пагнито проводы обратных преобразователей, статор датчика перемещений штока и статор измерителя скорости его перемещения .укреплены на платформе, связанной с приводом, где также установ лена кювета с исследуемьдм веществом. Статор датчика усилия закреплен на корпусе устройства, а выходы формирователей сигналов модуля упругости и вязкости связаны со входами исполнительных блоков через фильтрую чие блоки, настроенные на заданнуючастоту колебаний платформы. Известное .устройство имеет невысокую точность измерений, при интенсивном изменении модуля упругости и вязкости из-за наличия перекрестных связей между каналами измерения. Это обусловлено тем, что сигнал, про порциональный усилию, возникающему при дефррмации вещества, участвует одновременно в формировании сигналов, пропорциональных модулю упругос ти и вязкости. Конструкция статора обратного преобразователя модуля упругости обуславливает строгое симметрирование магнитных полей и прецизионное исполнение его якоря с катушкой. Полюса статора и якорь с катушками обратного преобразователя вязкости должны быть выполнены таким образом, чтобы их взаимное пере мещение не влияло на величину усили Фильтры аналов мо.дуля упругости и .вязкости не обеспечивают фильтрацию сигналов в широком диапазоне измене ния частоты деформации, так как не связаны с блоком ее настройки. Цель изобретения - повышение точ ности измерений в широком диапазоне скоростей изменения модуля упругости и вязкости путем разделения кана лов измерения. Эта цель достигается тем, что ка нал модуля упругости снабжен квадра ром/ блоком фильтров, элементов сра нения и блоком настройки, канал вяз кости - блоком фильтров, ;Рабочий узел устройства выполнен в виде коромысла, вх.од квадратора с зан с выходом да.тчика перемегпения. Выход квадратора через первый вход . блока фильтров канала модуля упругости подключен к первому входу эле мента сравнения, выполненного в виде суммирующего усилителя. Второй вход элемента сравнения соединен с выходом блока настройки, представля ющего собой стабилизированный источ ник напряясения. Вторые входы блоков ильтров каналов модуля упругости и язкости связаны со вторым выходом лока изменения частоты. Статоры обратных преобразователей закреплены на корпусе устройства, ричем на статоре (.братного преобра- зователя модуля упругости смонтирована катушка, связанная с первым выхоом исполнительного блока канала моуля упругости, катушка его якоря через второй выход усилителя соещинена с датчиком перемещения. На чертеже представлена структурная схема устройства для измерения вязкоупругих характеристик вещества, содержащая рабочий узел, выполненный в виде коромысла 1, подвер енного на неподвижной опоре 2, закрепленные на коромысле по одну сторону от опоры шторку 3 датчика усилия, шторку 4 .датчика переме чения коромысла, якорь 5 с катушкой 6 обратного преобразователя модуля упругости, якорь 7 с катушкой 8 обратного преобразователя вязкости, якорь 9 с катушкой 10 измерителя скорости перемещения коромысла, зонд 11, погруженный в исследуемое вещество 12 находящееся в кювете 13, расположенной на платформе 14, .совершающей возвратно-поступательное движение фиксированной амплитуды и частоты с помощью кулачка 15, сочлененного с приводом 16, которьлй связан с первым выходом блока 17 изменения частоты. Устройство содержит также статор 18измерителя скорости перемещения коромысла, статор датчика перемещения коромысла, включающего фотодиоды 19и лампочки 20, закрепленные на платформе 14; статор 21 обратного преобразователя модуля упругости с катушкой 22, статор 23 обратного преобразователя вязкости с катушкой 24 и статор датчика усилия, состоящее из фотодиодов 25 и лат- почек 26, статор 27 блока установки нуля с катушкой 28, закрепленный на корпусе уст-, ройства. Якорь 29 блока установки нуля закреплен на коромысле 1 с противоположной стороны от опоры 2, а потенциометр 30 электрически связан с катушкой 28 блока установки нуля. Выход датчика перемещения коромысла связан с усилителем 31, первый выход которого подключен к входу.квадратора 32, выход которого через первый вход блока фильтров 33 связан с первым входом элемента сравнения 34. Второй вход элемента сравнения соединен с выходом блока 35 настройки частоты канала модуля упругости. Выход элемента сравнения связан с входом исполнительного блока 36, первый выход которого подключен к катушке 22 статора 21 обратного преобразова,теля модуля упругости, а второй выход - к входу регистратора 37 модуля упругости исследуемого веьчества. Вхо катушки 6 якоря 5 обратного преобразователя модуля упругости связан со вторым выходом усилителя 31. Выход катушек 10 якоря 9 измерителя скорос ти перемещения подключен к входу уси лителя 38, первый выход которого сое динен с первым входом формиротзателя 39 сигнала вязкости,- представляющего собой множительное устройство. Вт.орой вход формирователя 39 через усилитель 40 связан с выходом датчика усилия, а выход формирователя соединен с первым входом блока Лильтров 41. Выход блока фильтров 41 связан со входом исполнительного блока 42 .канала вязкости, первый вход которог подключен к входу катушки 24 статора 23 обратного преобразователя вязкости а выход - с входом регистратора 43 вязкости исследуемого веидества. Устройство работает следующим образом. По сигналу блока 17 изменения частоты настраиваются блоки фильтров 33 и 41 и привод 16 через кулачок 15 сообидает платформе 14 возвратно-поступательное движение определенной амплитуды с заданной частотой. Вместе с платформой возвратно-поступательное движение совершает кювета 13 с исследуемым веществом, статор 18 измерителя скорости перемещения и статор дат чика перемещения с фотодиодами 19 и лампочками 20. Через зонд 11 на рабочий узел, выполненный в виде коромысла 1, со стороны вещества действует сила, пропорциональная его комплексному модулю на.частоте деформации, а через якоря 5 и 7 обратных преобразователей - силы, пропорциональные вязкости и модулю упругости, сумма которых направлена встречно силе, пропорциональной комплексному модулю вещества. При равенстве этих сил момент относительно опоры 2 буде равен нулю, что обеспечит горизонтальное положение.коромысла 1 и его неподвижность. Сигнал на выходе датчика усилия при этом равен нулю, а сигнал на выходе датчика перемещения будет иметь некоторое значение, определяемое амплитудой и частотой колебаний платформы 14. Следовательно, на выходе формирователя 39 сигнала вязкости сигнал будет равен нулю, и на выходе квадратора 32 будет постоянная составляющая, пропорциональная квадрату амплитуды колебаний платформы, и переменная составляющая отфильтровываемая в блоке фильтров 33 канала модулю упругости, настроенного на двойную частоту деформации В элементе сравнения 34, выполненном в виде суммирующего усилителя, происходит вычитание постоянной составляющей сигнала с выхода блока фильтров 33 и выходного сигнала блока настройки 35, представляющего собой источник стабилизированного напряжения величина которого определяется амплитудой колебаний платформь 14 при равенстве нулю суммарной силы на коромысле 1 и выбирается такой величины и знака, чтобы сигнал на выходе элемента сравнения 34 был бы равен нулю. Сигнал со второго выхода усилителя 31, синфазный с колебаниями платформы 14, поступает в катушку 6 якоря 5 обратного преобразователя модуля упругости, где создается переменное магнитное поле. Сигнал со второго выхода усилителя 38, вход которого связан с выходом катушки 10 якоря измерителя скорости перемещения, поступает на катушку 8 якоря 7 обрат ного преобразователя вязкости, где создается также магнитное поле, сдвинутое относительно магнитного поля обратного преобразователя модуля упругости на угол /С/2. Сила, действующая на якорь 5 обратного преобразователя модуля упругости будет пропорциональна произведению токов в катушке 6 якоря 5 и в катушке 22 статора 21 обратного преобразователя модуля упругости. Следовательно, силы, действующие на якорь 5, будут пропорциональны амплитуде перемещения, синфазного с перемещениями платформы, и величине модуля упругости. Сила, действующая на якорь 7 обратного преобразователя вязкости, будет пропорциональна произведению тока в катушке 8 и тока в катушке 24 статора 23 обратного преобразователя вязкост-и, величина которого пропорциональна вязкости вещества. Следовательно, сила, действующая на якорь 7, пропорциональна скорости деформации и величине вязкости. При изменении модуля упругости вещества вместе с платформой будет перемещаться и коромысло, причег-л эти колебания будут иметь одинаковую фазу. Сигнал с выхода формирователя 39 сигнала вязкости при этом не изменится, так как наего входы поступают сигналы с выходов датчика усилия (фотодиодов 25) и измерителя скорости перемещения (катушки 10), сдвинутые на угол 1t/2, но амплитуда сигнала с выхода датчика перемещения (фотодиодов 19) изменится, что приведет к изменению .сигнала на выходе квадратора 32 и, следовательно - на выходе элемента сравнения 34. Это, в свою очередь, приведет к изменению тока на выходе исполнительного блока 36 канала модуля упругости, представляющего собой интегратор, до тех пор пока сила на якоре 5 не скомпенсирует силу, обусловленную изменением модуля упругости вещества. Сигнал со второго выхода исполнительного блока 36 регистрируется в регистраторе 37,
При изменении вязкости вещества изменится фаза сигнала, пропорционального силе, что приведет к появлению сигнала на выходе формирователя 39 и к последующему изменению тока в катушке 24 статора 23 обратного преобразователя вязкости, которое будет происходить дополной компенсации вязкости вацества. Амплитуда сигнала на выходе датчика перемещения коромысла 1 (фотодиодов 19) не изменится и величина сигнала на выходе квадратора 32 и, следовательно, тока исполнительного блока 36.
При изменении частоты деформации блоком изменения частоты 17 одновременно осуществляется перенастройка блоков фильтров 33 и 41.
Таким образом, в предложенном устройстве установкой квадратора разделяются измерительные цепи каналов модуля упругости и вязкости: закреп-лением статоров на корпусе прибора и установкой катушки в статоре обратного преобразователя модуля упругости, созданием переменных магнитных полей, сдвинутых по фазе на угол /2, в катушках якорей обратных преобразователей, настройкой фильтров на.частоту деформации обеспечивается разделение испапнительных каналов модуля упругости и вязкости, чем достигается автономность процессов измерения активной и реактивной составляющих комплексного модуля, вещества в широком диапазоне скоростей их изменения.
Формула изобретения
Устройство для измерения вязкоупругих характеристик веществ, содержащее корпус, кювету с исследуемым веществом, рабочий со сменным зондом, привод, блок изменения частоты, датчик усилия, датчик перемещения, измеритель скорости перемещения рабочего узла, обратный преобразователь вязкости, содержащий статор с катушкой и якорь с катушкой, обратный преобразователь модуля упругости, содержащий статор и якорь с катушкой, испол.нительные блоки канала модуля упругости, усилитель и измерительную систему, о т .л и ч а ющ е е с я тем, что, с .целью по вышения точности измерения модуля упругости и вязкости путем разделения каналов измерения, канал модуля упругости дополнительно снабжен квадратором, блоком фильтров, элементом сравнения и блоком настройки, а канал вязкости - блоком фильтров, причем рабочий узел выполнен в виде коромысла, вход квадратора связан с выходом датчика перемещения, его выход, через первый вход блока фильтров канала модуля упругости связан с первйм входом злемента сравнения, выполненного в в-иде суммирующего усилителя, второй вход которого соединен с выходом блока настройки, выполненного в виде стабилизированного источника напряжения, вторые выходы блоков фильтров каналов модуля упругости и вязкости связаны со вторым выходом блока изменения частоты, а 0 статоры обратных преобразователей закреплены iHa корпусе устройства, причем на статоре обратного преобразователя модуля упругости укреплена катушка, связанная с первым выходом 5 исполнительного блока канала модуля упругости,, катушка его якоря через второй выход усилителя - с датчиком перемещения.
.Источники информации.
принятые во внимание при экспертизе
1.Авторское свидетельство СССР 528482, кл. G 01 N П/Ю, 1976.
2.Авторское свидетельство СССР № 567119, кл. G 01 N 11/16, 1977
(прототип),
| название | год | авторы | номер документа |
|---|---|---|---|
| Вибрационный эластовискозиметр | 1976 |
|
SU567119A1 |
| Устройство для измерения реологических характеристик вязкоупругих сред | 1977 |
|
SU708202A1 |
| Эластовискозиметр | 1982 |
|
SU1080070A1 |
| Эластовискозиметр | 1979 |
|
SU993102A2 |
| Вибрационный измеритель реологических характеристик веществ | 1978 |
|
SU777556A1 |
| Устройство для измерения вязкоупругих характеристик сред | 1977 |
|
SU687377A1 |
| Устройство для определения реологических характеристик жидкости в потоке | 1976 |
|
SU655933A1 |
| Эластовискозиметр жидких материалов в потоке | 1978 |
|
SU763745A1 |
| Способ определения реологических характеристик веществ и устройство для его реализации | 1976 |
|
SU864062A1 |
| Эластовискозиметр | 1980 |
|
SU890151A1 |