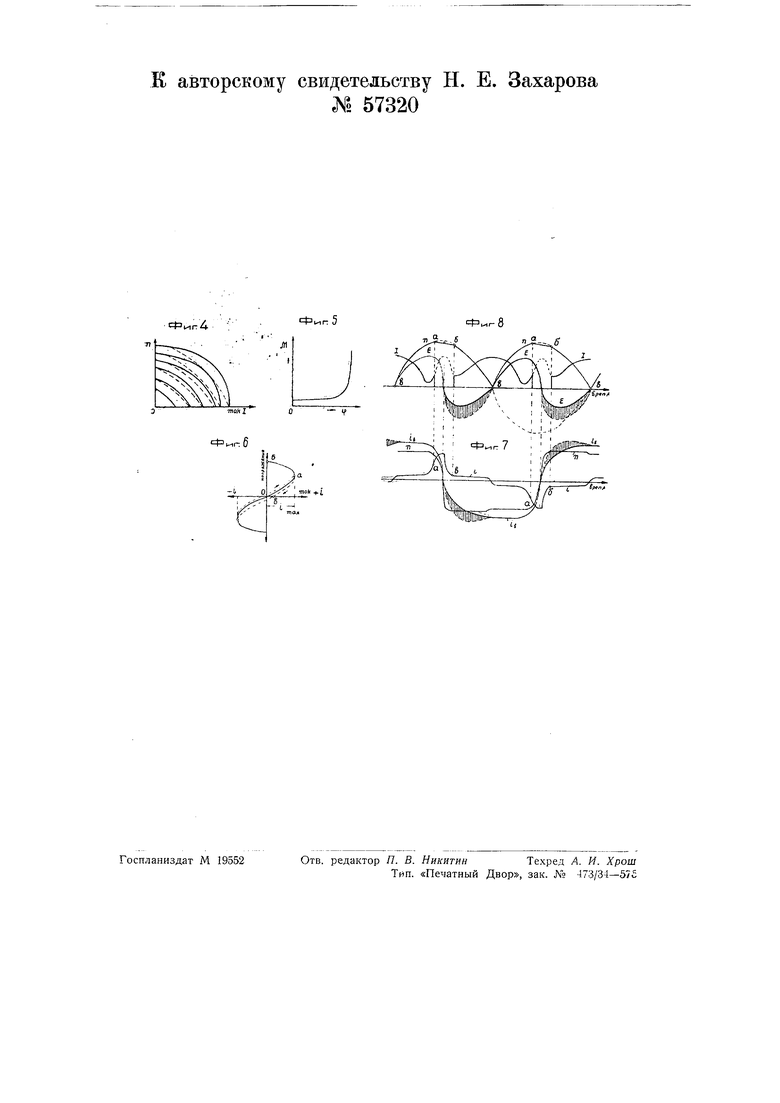
Для некоторых механизмов бывает необходимо иметь такую систему привода, которая обладала бы механической характеристикой специального вида, например, сильно компаундной, со строго ограниченным моментом (фиг. 4) и т. п., и кроме того допускала бы экономичную регулировку скорости и момента в широких пределах.
В приводах с резко выраженным динамическим характером нагрузки ставится условие, чтобы кинетическая энергия, запасенная во вращающихся или движущихся поступательно массах, при ускорении возвращалась обратно в сеть в моменты замедленного диижения. Это приводит к необходикости устройства или обратимых систем выпрямления или комбинированных двустороннего действия.
Обыкновенно, эти условия ставятся в тех случаях, когда привод работает в повторно кратковременном режиме, например, для кранов, лифтов, реверсивных прокатных станов, строгальных станков, одноковщевых экскаваторов, грейферов и т. д.
В некоторых случаях, когда нагрузка часто и резко меняется, как например.
в одноковщевых экскаваторах, где даже возможны непреодолимые препятствия - упор в валун или скалу, к выпрямительной системе должно быть предъявлено еще одно требование, чтобы фазовращающее приспособление быстро реагировало на изменение нагрузки, т. е. всегда ограничивало крутящий момент двигателя определенной, заранее установленной, величиной. Ясно, что если фазовращатель будет реагировать на изменение нагрузки с большим запаздыванием, то в системе появятся пиковые токи, на много превосходящие тот наибольший ток, на который фазовращатель настроен. Это условие имеет наиболее существенное значение как раз в системах с тиратронами, так как они весьма чувствительны к перегрузкам. Последние, если они значительны, снижают срок службы тиратронов. Иногда, в частности для указанного выше примера, не менее важным, а в некоторых случаях и решающим условием является компактность и простота установки. Во всех нодобных случаях осуществление двусяхэронности работы системы путем установки двух комплектов выпрямителей нерационально и даже невозможно из-за недостатка места. Поэтому естественно поставить задачу осуществить при одном комплекте выпрямителей как выпрямление тока, так и инвертирование есо при соблюдении вышеизложенных требований и тех необходимых условий, которые вытекают из самих процессов выпрямления и инвертирования, а также перехода от одного к другому.
Как известно, условие, которое должно быть выполнено для того, чтобы получить регенерацию через тот же самый выпрямитель, состоит в том, что одновременно с переводом угла зажигания в область отрицательной полуволны переменного напряжения вторичной обмотки анодного трансформатора необходимо изменить полярность на зажимах рабочего двигателя. Только при этом условии направление тока останется неизменным, а поток энергии, наоборот, будет направлен в противоположную сторону, т. е. от двигателя через анодный трансформатор в сбть.
В существующих системах, например, в системе Вард-Леонарда, регенерация происходит, так сказать, естественным путем без разрыва главной и возбудительной цепей, благодаря чему получается известная простота управления и чрезвычайно большая надежность работы всей системы. Только этим можно объяснить тот факт, что, несмотря на громоздкость и дороговизну подобных систем, они все же нашли самое широкое применение как раз там, где условия работы чрезвычайно тяжелы, например, на экскаваторах, реверсивных прокатных станах, мощных грейферах и т. д.
В отношении машин и устройств, работающих: 1) по циклическому графику, в котором встречаются все воз.можные режимы двигателя (разгон, торможение, рекуперация и т. д.); 2) когда рабочая машина может встречать сопротивления, меняющиеся от нуля и до величип непреодолимых и, наконец, 3) в условиях, когда вся установка получает сотрясение и удары, можно сказать заранее, что единственно правильным решением будет такая система, которая меняла бы знак, регулировала и ограничивала до
определенного, заранее установленного, предела вращающий момент рабочего двигателя без разрыва силовой цепи. Наиболее ярким примером может служить применяемая на экскаваторах система Вард-Леонарда с генератором, имеющим диференциальное возбуждение. В ней генератор и двигатель соединяются наглухо и ни в одной цепи не имеется автоматических выключающих приборов. Последние не могли бы устойчиво работать, так как сотрясения и удары всегда вызывали бы расстройство контактов и система в целом не могла бы работать надежно, не говоря уже о том, что частые отклонения автоматов из-за постоянно появляющихся перегрузок сделали бы работу экскаватора почти невозможной.
Вообще говоря, наличие в системе автоматической коммутационной аппаратуры, работающей па разрыв тех или иных цепей, вносит существенно большой фактор ненадежности. Это следует уже из того, что, по сути дела, указанная аппаратура не исключает и предполагает появление ненормальных перегрузок, из-за которых каждый раз нарушается на некоторое время работа всей установки. Кроме того, надежность и срок службы этой аппаратуры ниже, чем силового оборудования, и она, в условиях тряски, вибраций и наклонов, всегда доставляет много хлопот и неприятностей в эксплоатации.
Настоящим изобретением имеется в виду создать электропривод, в котором все встречающиеся на практике рабочие процессы, как-то: пуск в ход, регулирование, реверсирование, торможение с рекуперацией энергии и остановка происходили бы без участия какой бы то ни было коммутационной и автоматической аппаратуры, т. е. в условиях, когда электрические цепи раз и навсегда замкнуты, включая и главную цепь управления, и, чтобы, при каких угодно неблагоприятных условиях., момент на валу электродвигателя не превосходил заранее установленной величины.
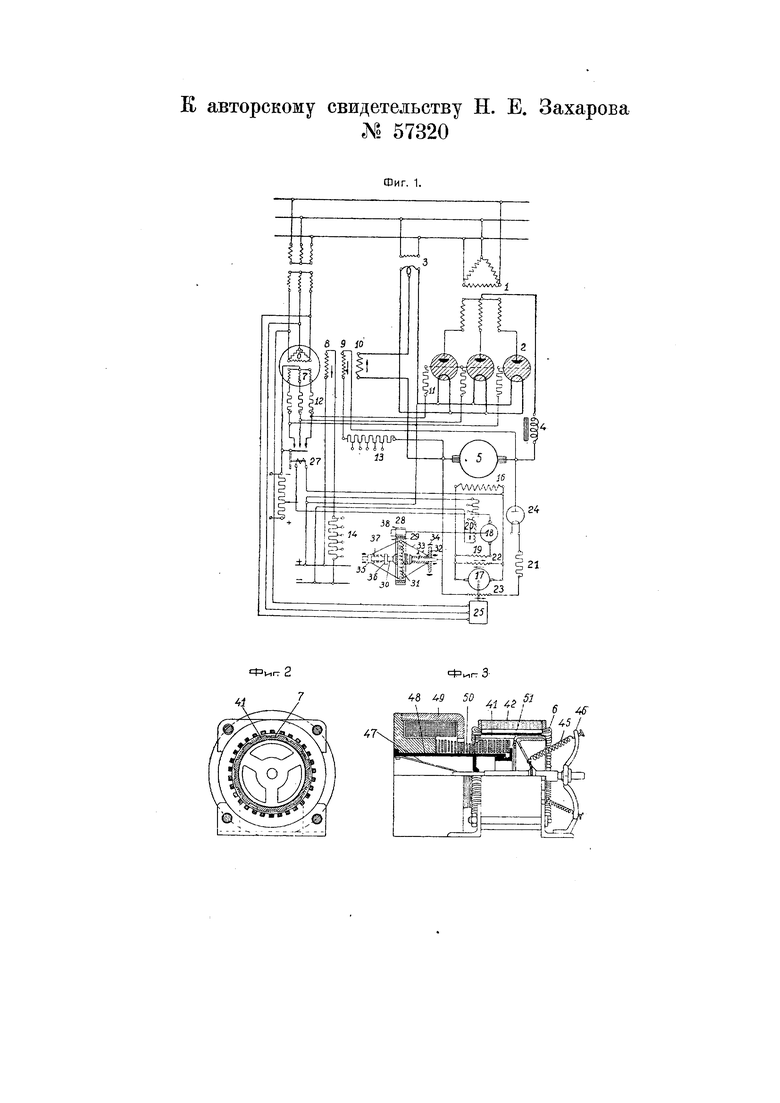
Сущность Изобретения, заключающаяся в оригинальном выполнении узла возбуждения рабочего (регулируемого) двигателя и в оригинальной конструкции фазопреобразователя, поясняется чертежом, на котором фиг. 1 изображает электрическую схему предлагаемого устройства; фиг. 2 и 3 - фазорегулятор в двух проекциях с разрезами; фиг. 4-8 - диаграммы, поясняющие действие устройства.
На схеме фиг. 1 имеются следующие обозначения: 1 - анодный трансформатор, 2 - тиратроны, 5 - трансформатор накала, 4 - дроссель, 5 - управляемый двигатель постоянного тока, б и 7 - обмотки статора и ротора фазорегулятора (фазопреобразователя),
8- независимая обмотка электромагнита, пристроенного к фазорегулятору,
9- обмотка электромагнита, обтекаемая током, пропорциональным э. д. с. управляемого двигателя, 10 - обмотка электромагнита, обтекаемая выпрямленным током, 11 и 12 - омические сопротивления, включенные в цепь сеток, /5 и 14 - регулировочные сопротивления, включенные в цепи обмоток S и 5.
Ампервитки обмоток 8, 9 10 ориентированы так, что первые две действуют навстречу обмотке 10. Таким образом, последняя обмотка является размагничивающей.
Взаимодействие указанных обмоток обусловливает, во-первых, строгое ограничение выпрямленного тока, а следовательно, и крутящего момента двигателя, во-вторых, механическая характеристика последнего может быть получена формы, аналогичной кривым, изображенным на фиг. 4.
Фиг. 2 и 3 дают представление об устройстве и принципе действия фазорегулятора (фазопреобразователя).
Он состоит из: 1) статора 42 с трехфазной двух- или четырехполюсной обмоткой 6; 2) ротора 41 с соответствующей трехфазной обмоткой 7; 3) электромагнита 49 с тремя катушками (число катушек может быть любым); 4) магнитопровода 50 в виде цилиндрической пружины специальной формы и 5) уравновешивающего приспособления, состоящего из топкого троса или струны 47, цилиндрических пружин 45, прикрепленных одним концом к ребрам ротора, а другим - к дуге 46. Это приспособление служит для настройки фазорегулятора; для этой же цели служит и гайка 51.
Ротор 41 опирается на подщипниковый щиток и втулку 48, на которой покоится спираль 50. Ротор, таким образом, может только поворачиваться.
Принцип действия прибора состоит в следующем.
Вращающийся магнитнь й поток статора 42 наводит в обмотке 7 переменную электродвижущую силу (э. д. с.) одинаковой частоты с напряжением сети.
Для получения э. д. с. остроугольной формы магнитопровод ротора делается небольшого сечения и из специального сорта железа, которое быстро насыщается. Таким образом в этом отнощении получается как бы импульсный трансформатор, в котором из-за того что сердечник быстро насыщается, кривая э. д.с. вторичной обмотки сильно искажается, получая остроугольную форму.
Та часть ротора, которая заходит в промежуток между статором и спиралью 50, имеет прорезы. Конструктивно число этих прорезов может быть равно или в два раза больше числа па3GB, устроенных на массивной части ротора. Благодаря этим прорезам по учаются стержни наподобие беличьей клетки, однако до наложения обмотки 6 они будут разомкнуты.
После наложения обмотки стержни могут быть соединены электрически при помощи специального кольца или каким-либо иным путем. Железные стержни, таким образом, будут служить одновременно проводником силовых магнитных линий. Так как в данном случае частота тока ротора одинакова с частотой тока статора, то, по крайней мере, в установившемся режиме на величину тока ротора скажет сильное влияние явление скин-эффекта. Действие последнего, как известно, равносильно омическому сопротивлению, включенному в цепь ротора асинхронного двигателя. Благодаря этому предполагается получить от фазорегулятора мягкую и вместе с тем устойчивую характеристику.
Поток статора, пересекая железные стержни ротора, наводит в них э. д. с. и ток, который, взаимодействуя с магнитным потоком статора, создает вращающий момент; под влиянием этого
момента ротор повернется на некоторый угол, вместе с чем установится и соответствующий угол зажигания.
Регулирование угла зажигания основывается на том, что магнитный поток, охватывающий стержни ротора, может изменяться (за счет перераспределения в расточке статора) благодаря перемеисению витков спирали 50 из области статора в область электромагнита 49 и, наоборот, в зависимости от того, в какую сторону сдвинется равновесие. Последнее достигается под влиянием двух противоноложно направленных сил магнитного притяжения.
С одной стороны действует втягивающая сила вращающегося поля статора, которое, стремясь увеличиться, будет сближать витки и тем самым уменьшать сопротивление магнитной цепи. С другой стороны, действует сила электромагнита, стремящаяся перетянуть витки из области статора. При надлежащем подборе параметров прибора между действием статора и электромагнита может быть достигнуто устойчивое равновесие, которое будет сдвигаться то в одну, то в другую сторону, в зависимости от изменения намагничивающей силы электромагнита. Намагничивающая сила последнего создается совместным действием обмоток, обтекаемых разными токами, так или иначе зависящими от рабочего режима выпрямительной системы.
Обмотки электромагнита следует ориентировать таким образом, чтобы, при увеличении сшты тока в цепи якоря электродвигателя, вращающийся поток статора 42 увеличивался; тогда будет увеличиваться момент вращения ротора, а следовательно, и угол зажигания.
Для достижения устойчивого равновесия спирали 50 придается специальная форма, которая должна исключить возможность самовозбуждения электромагнита. Для этого нужно подобрать подходящую зависимость величины зазора от числа перемещаемых в ту или другую сторону витков снирали 50; одновременно с этим можно изменять промежутки между витками путем подвертывания гайки 51.
Благодаря сравнительно очень легкому ротору фазорегулятор будет достаточно быстро реагировать на резкие изменения нагрузки.
Работу устройства и изменение тока регулируемого двигателя 5 в зависимости от скорости вращения двигателя можно проследить следующим образом. Если нагрузка на валу двигателя увеличится, то возрастает ток, который ослабит магнитный поток электромагнита и часть витков спирали 50 перейдет в область статора; от этого магнитный поток статора перераспределится так, что возрастет вращающий момент ротора и, следовательно, угол зажигания увеличится, но вместе с увеличением последнего среднее значение выпрямленного напряжения )меньшится, от чего скорость двигателя упадет. Уменьщение скорости двигателя, в свою очередь, вызовет уменьшение ампервитков обмотки Я отчего размагничивание электромагнита усилится.
Обмотка 9 оказывает большое влияние на форму кривой момента, так как она, начиная с некоторого значения тока двигателя, сильно уменьщает магнитный поток электромагнита, благодаря чему кривая получает сразу же крутой загиб вниз (фиг. 4).
Влияние обмотки 9 будет тем больше, чем больше предельные ампервитки ее. Поэтому, для получения механической характеристики желаемой формы предусмотрено регулировочное сопротивление 13 (фиг. I).
При уменьщении нагрузки все произойдет в обратном порядке.
В предельном положении, когда двигатель остановится под нагрузкой, в обмотке 10 установится максимальный ток, а в обмотке 9 ток упадет почти до нуля. В этом положении магнитный поток электромагнита будет обусловлен разностью ампервитков, создаваемых обмотками 8 и 10.
Для регулирования предельного тока предусмотрено регулировочное сопротивление 14, включенное в цепь независимой обмотки электромагнита.
Если теперь, по каким-либо причинам, полярность на зажимах двигателя изменилась, то изменится направление тока в обмотке 9 и поток электромагнита еще больше уменьшится. Спираль
50 еще больше сдвинется в сторону статора. Это, в свою очередь, вызовет дальнейшее увеличение угла зажигания, который перейдет в область .1,ательной полуволны; вектор напряжеия вторичной обмотки анодного трансформатора изменит направление на обратное. Таким образом, условие для перехода от выпрямления к инвертированию в фазорегуляторе выполняется.
Возбуждение управляемого двигателя 5 (фиг. 1) осуществляется от отдельной возбудительной установки, состоящей из: 1) генератора 17, соединенного непосредственно с независимой обмоткой возбуждения 16 и приводимого во вращение асинхронным двигателем 25; 2) двигателя /8 с независимой обмоткой 20, включенного последовательно с обмоткой возбуждения 19 на зажимы генератора 77; 3) газотрона 24, включенного в цепь независимой обмотки 23; 4) специального механизма, связанного с двигатегем 18 при помощи какой-либо переачи, например, зубчатой (шестерни 8 и 29).
Основной обмоткой возбуждения у генератора 17 является шунтовая обмотка 22.
Обмотки 19 и 23 включены навстречу обмотке 22, но только обмотка 23 обтекается током в определенные периды, о чем будет сказано ниже.
Конструкция упомянутого выше механизма в общих чертах заключается в следующем.
Крестовина 30 опирается на два подшипника, в которых она может свободно вращаться. В эту крестовину встраиваются- две пружины: одна - осевая 37 (помещается между двумя свободно скользящими по оси крестовины кольцами 55 и 36) и другая - диаметральная 31 помещается в стакане с соответствующими прорезами для пропуска троса 55 и имеет на своих концах по ролику (на чертеже не показанных).
На правую часть оси крестовины надевается щайба 32, к которой прикрепляются два конца гибкого троса 55; таким образом, трос под действием двух вышеуказанных пружин находится всегда в натянутом состоянии.
К стакану крестовины прикрепляется
шестерня 29 (или шкив), с которой сцепляется моторная шестерня 28.
Назначение этого механизма заключается в следующем: если шайба 32 заторможена (что может быть достигнуто соответствующим тормозом 54 или каким-либо стопорным приспособлением), то под действием двигателя J8 трос 55 будет навиваться на щайбу 32; при этом пружины 5/ и 57 будут сжиматься. Принимая во внимание, что при сжатии пружины 31 угол а (фиг. 1) уменьшается, характеристика механизма, т. е. зависимость крутящего момента Л4 крестовины от угла 9 закручивания (или, что все равно, от числа ее оборотов) будет иметь форму, аналогичную фиг. 5. Можно так подобрать пружины 5/ и 57, что в интервале, почти равном предельному углу закручивания, крутящий момент будет иметь почти постоянное значение. Таким образом, при навивке троса механизм получает некоторый запас энергии.
Характеристика с пр иблизительно параллельным участком кривой обусловливает постоянство возбуждения двигателя 5 в течение всего рабочего процесса.
Система, состоящая из комбинации выше т азанных машин, обмоток возбуждения и механизма 28-57, может менять ток ; в обмотке возбуждения 16 по величине и нзиправлению непрерывно. Как известпо, внешняя характеристика щунтового генератора имеет устойчивую аб и неустойчивую ав части (фиг. 6). При токе Jrnax (точка а) генератор начнет размагничиваться, если нагрузка имеет тенденцию увеличиваться; при этом ток спадет до значения, соответствующего точка в. Но если в этот момент от какого-либо постороннего источника тока при помощи другой обмотки возбуждения генератор намагнитить в обратном направлении, то он сам возбудится в том же
направлении, причем посторонний источник тока может быть отключен раньше, чем генератор полностью возбудится; здесь важно только изменить направление потока, т. е. создать обычные условия для самовозбуждения. Эти условия как раз и создаются
тем, что двигатель 18, включенный последовательно с обмоткой 19 на зажимы генератора 17, в нужный момент затормаживается вышеуказанным механизмом, причем, согласно фиг. 5, двигатель некоторое время работает под небольшой постоянной нагрузкой, так что ток, протекающий по обмотке 19, не окажет почти никакого влияния на возбуждение генератора 17, но как только пружины сомкнутся до отказа, то сразу же ток в обмотке 19 быстро возрастет, вследствие чего генератор 17 размагнитится, и напряжение на его зажимах упадет почти до, нуля. Так как двигатель 18 получает питание от генератора 17, то момент его тоже упадет почти до нуля и тогда, под действием механизма 28-37, двигатель начнет вращаться в обратную сторону. В этот момент потенциальная энергия механизма перейдет в электрическую и по обмотке 19 потечет ток в том же направлении, в каком он проходил до размагничивания. Он то и возбудит генератор 17 в противоположном направлении.
По мере роста напряжения генератора 17 скорость двигателя 18 будет возрастать (при этом трос сматывается), двигатель начнет работать в качестве генератора, а ток в обмотке 19 сохранит свое направление, т. е. он будет намагничивать генератор. Поскольку ток этот, noi сравнению с никовым, ничтожно мал, он на возбуждении генератора почти совсем не отразится.
Далее, когда трос начнет наматываться, двигатель будет преодолевать сопротивление от сжатия пружины; вследствие этого появится сначала очень небольшой размагничивающий ток, а потом этот ток быстро возрастет и онять размагнитит генератор.
Нетрудно усмотреть, что циклическое намагничивание генератора может длиться сколько угодно времени как некоторый периодически повторяющийся непрерывный процесс. Продолжительность периода и характер изменения напряжения генератора, а следовательно, и тока возбуждения управляемого двигателя, будут зависеть: первый - от передаточного числа и скорости двигателя 18, второй - как от характеристики механизма 29-37
((})иг. 5) и самого генератора, так и от инерции вращающихся масс механизма 29-37 и якоря двигателя 18.
Сочетание подобной системы возбуждения рабочего двигателя с описанным выше фазорегулятором позволяет осуществить управление двигателем без участия автоматической и коммутационной аппаратуры: все процессы в предлагаемом устройстве протекают во времени непрерывно, а момент двигателя всегда остается ограниченным, независимо от характера и величины внешних сопротивлений, преодолеваемых рабочим механизмом.
Предлагаемое устройство обладает тем свойством, что, во-первых, скорость двигателя 5 может меняться периодически по любому графику, а вовторых, продолжительность периода можно изменять в очень широких пределах. Так, изменяя передаточное число механизма и магнитный поток двигателя 18 и переставляя упорное кольцо 36, можно установить любой период работы в пределах от долей секунды до нескольких минут. Однако, для целого ряда случаев требуемый диапазон изменения может быть осуществлен за счет только изменения ноля двигателя 18.
Поэтому, предлагаемое устройство открывает возможности для осуществления полной автоматизации рабочих процессов некоторых машин, как, например, одноковшевого экскаватора, грейфера и т. п., работающих по циклическому графику.
На фиг. 8 приведены графики скорости (кривая л), тока (кривая /) и э. д. с. рабочего двигателя (кривая Е) для случая циклического поворота тяжелой материальной системы (случай аналогичен повороту экскаватора).
За основную периодическую кривую здесь принята не кривая числа оборотов, а кривая э. д. с., как непосредственно вытекающая из свойств разобранной схемы возбуждения.
Как 1видно, в одном периоде изменения скорости двигателя укладываются два периода изменения его э. д. с.
Положительная полуволна э. д. с. соответствует разгону, а отрицательная - торможению, причем при торможении имеется возврат той части энергии, которая запасается в поворотной системе во время разгона.
Для того, чтобы в инвертерном speжиме исключить возможность короткого замыкания, амплитуда отрицательной полуволны напряжения Е на зажимах двигателя значительно уменьшена по сравнению с режимом выпрямления (см. заштрихованные участки на кривой Е фиг. 8). Это достигается при помош,и обмотки 23 и газотрона 24, который включается таким образом, что он пропускает ток только во время торможения. Во время же разгона ток через газотрон не пройдет, и обмотка 23 окажется как бы отключенной от двигателя 5.
Для подрегулировки тока в цепь обмотки 23 включается сопротивление 2/.
Влияние обмотки 23 на возбуждение двигателя наглядно представлено на фиг. 7 (кривая ;,,), где заштрихованные участки показывают, насколько s каждый момент времени уменьшается счла тока возбуждения при торможении системы.
В интервале а, б, когда возбуждение двигателя меняет знак, ток достигнет максимальной величины. Здесь ток не производит полезной работы, а только нагревает двигатель. Для того, чтобы этого не было, в схеме предус.мотрен контактор 27, который в точке а замыкает сеточную цепь на короткое и тем самым запирает одновременно все рабочие тиратроны, что равносильно выключению двигателя. В точке б контактор размыкает сеточную цепь, и двигатель оказывается включенным. Если время торможения будет мало по сравнению с продолжительностью полупериода, то, очевидно, контактор можно и не предусматривать.
В инвертерном режиме (при торможении) изменение скорости в зависимости от момента приблизительно пойдет по пунктирной кривой фиг. 4.
Управление двигателем 5 и настройка схемы по фиг. 1 для тех или иных условий работы производятся следующим. образом. Прежде всего следует отметить, что, если двигатель 18 непосредственно затормозить (для чего потребуется другой тормоз 38 на фиг. 1), то возбуждение почти упадет до нуля.
Таким образом, одновременно с запиранием тиратронов имеется возможность снять с рабочего двигателя и возбуждение, что равносильно полному выключению двигателя от питаюпхей установки, хотя главные цепи (якорная и возбуждения) остаются при этом замкнутыми.
Пользуясь тормозом 38, можно каждый полупериод изменения скорости (фиг. 8) разделять паузами любой продолжительности. Например, производя каждый раз торможение в точке в на фиг. 8, мы будем фиксировать определенный угол поворота в том или ином направлении. В таком случае, двигатель 18 может быть непосредственно соединен с крестовиной 30.
Если же затормаживание будем производить через одну точку б, т. е. регулярно через каждый полный период, ТС мы будем совершать поворот системы с возвратом в исходное положение. Случай этот может быть применен для экскаваторов, работающих в отвал.
Если тормозы 34 и 55 выключены, то двигатель 18 будет вращаться вхолостую с постоянной скоростью сколь угодно долго, а следовательно, и главный двигатель вынужден будет вращаться в одну сторону. Однако, скорость его будет зависеть от нагрузки, так как, хотя возбуждение его постоянно, но зато угол зажигания будет меняться в зависимости от выпрямленного тока (характеристика фазорегулятора от возбуждения двигателя не зависит).
В этом случае получаются обычные условия работы электропривода, когда двигатель, преодолевая какую-либо нагрузку, вращается в одну сторону, например, во время подъема груза, передвижения .моста, экскаватора, крана и т. п. Спуск груза со скоростью выше подъемной может быть осуществлен путем притормаживания двигателя /5, что вызовет ослабление поля двигателя 5, а следовательно, и его момента. Вследствие этого груз перетянет, двигатель 5 изменит направление вращения, вместе с чем изменится и полярность на его зажимах. Таким образом, и в этом случае условие для перехода от выпрямления к инвертированию
выполняется. Что касается газотрона 24, то он может и не потребоваться.
Чтобы осуществить реверс, необходимо тормоз 38 выключить, а шайбу 32 на некоторое время затормозить. Процесс переключения описан выше.
Кроме разобранного выше способа спуска груза находит большое применение, так называемый, силовой спуск с рекуперацией энергии. Скорость спуска при этом выше скорости подъема. Переход- от подъема па спуск происходит путем реверса, а не путем ослабления поля двигателя, как было раньше.
Этот случай требует два реверса, т. е. необходимо два раза затормозить тормоз 34: один раз до разгона, а другой раз - после того, как скорость двигателя 5 начнет повышаться под действием груза. Кроме того, после второго реверса необходимо выключить тормоз 34. Все это может быть осуш,ествлено путем соответствуюш,его подбора параметров возбудительной системы (передаточного числа механизма 29-37, величины сжатия его пружин, насыш,ения двигателя 18 и т. д.).
Предлагаемая схема возбуждения рабочего двигателя 5 может быть применена пе только для питания его от выпрямителей, но п в случае питания от специального генератора с диференциальньш возбуждением (система Бард-Леонарда). В этом случае свойства привода будут аналогичны свойствам описанного привода.
Таким образом, электропривод, выполненный согласно настояш;ему изобретению, обладает следующими свойствами:
1. Все процессы, связанные с изменением направления вращения, торможением и остановкой рабочего двигателя, происходят в условиях замкнутой системы электрических цепей без участия коммутационной и автоматической аппаратуры, npn4e t ток, а следовательно, и момент двигателя во времени изменяются непрерывно, оставаясь строго ограниченными.
2. Рекуперация энергии может происходить через один и тот же выпрямитель, т. е. система обратима, причем переход от выпрямления к инвертированию осуществляется плавно без резких толчков тока.
Предмет изобретения.
1.Устройство для автоматического регулирования двигателя постоянного тока, питаемого от ионного выпрямителя, управляемого при посредстве фазопреобразователя, с применением сдельного мотор-генератора для возбуждения регулируемого двигателя, отличающееся тем, что, с целью осуществления всех рабочих процессов регулируемого двигателя при постоянно замкнутых электрических цепях и изменения момента двигателя в строго ограниченных пределах, к зажимам возбудительного генератора 17 подключена вспомогательная машина постоянного тока 18, связанная механически с регулировочным приспособлением в виде троса, надетого на вращающуюся крестовину с двумя пружинами таким образом, чтобы намагничивание возбудительного генератора имело циклический характер.
2.Форма выполнения устройства по п. 1, отличающаяся тем, что, с целью плавного перехода от выпрямления к инвертированию, фазопреобразователь выполнен с очень легким ротором и органически связан с электромагнитом со спиральным якорем, служащим одновременно магнитопроводом.
3.В устройстве по пп. 1 и 2 применение добавочной обмотки возбуждения 23 у возбудителя 77, подключенной через газотрон 24 к зажимам регу.лируемого двигателя 5, с целью предохранения от короткого замыкания в инвертерном режиме.
к авторскому свидетельству Н. Б. Захарова
Д1 57320
сригтЗ
(РмгтЗ4S 4-5 5, И
1 7 Т / б 46
{ у/ -щ: I I I с
штщШШ 5
к авторскому свидетельству Н. Е. Захарова
№ 57320
ФмгЭ
.
- 1
Фиг 6
|к
# mok +1.
-Iо
Т
