У управляемых на расстоянии механизмов время торможения зависит от величины скорости, которую механизм имел в момент подачи команды „стоп.
Поэтому, обычно предусматривается опережение команды „стоп, зеличина которого определяется так, чтобы после выбега управляемый механизм пришел в заданное положение. Эта задача успешно разрешается в случае, когда механизм останавливается всегда с установившейся постоянной скорости. Время выбега, при этом, практически постоянно, так что опережение удобно задается, как функция пути следяш,его устройства.
В ряде случаев (например, случай привода нажимного устройства прокатных станов) скорость механизма в момент подачи сигнала „стоп меняется в очень широких пределах, что приводит в итоге к уменьшению точности работы и понижению средней скорости в период рабочего цикла (разгон, работа при постоянной скорости, выбег).
Предлагаемое устройство имеет целью достичь автоматической зависимости между величиной опережения и скоростью управляемого механизма, что повышает точность работы и дает
большую среднюю скорость в продолжение рабочего цикла.
Для осуществления этой цели в предлагаемом устройстве, согласно изобретению, на вал управляемого двигателя насаживается вспомогательный генератор, напряжение которого используется для сдвигания в сторону опережения равновесного положения следящей системы. Для этого напряжение генератора может быть подано в качестве смещающего напряжения в цепь сетки ионных приборов потенциометрического следящего устройства или же может быть использовано для питания серводвигателя, предназначенного поворачивать одну из частей следящей системы, находящуюся под воздействием пружины.
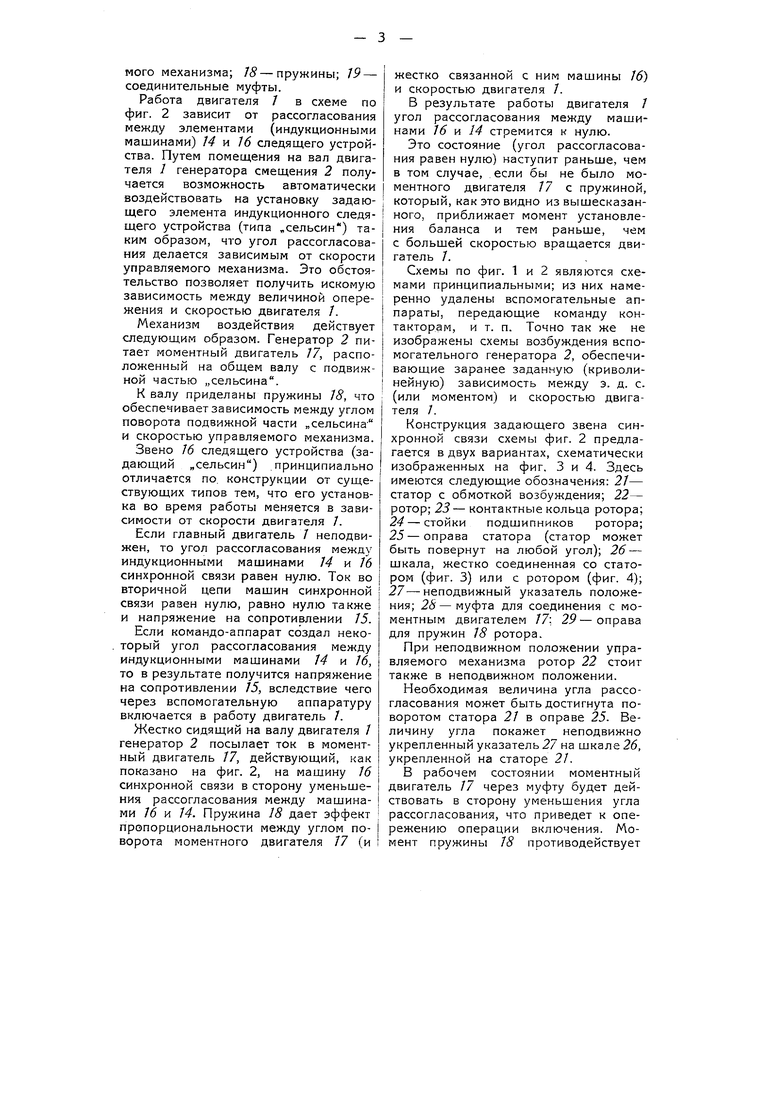
Сущность изобретения поясняется чертежом, на фиг. 1 и 2 которого изображены электрические схемы двух возможных вариантов предлагаемого устройства, на фиг. 3 и 4 - два варианта конструкции задающего звена следящей системы в продольном разрезе.
На фиг. 1 имеются следующие обозначения: / - двигатель, управляемый следящим устройством, образуемым потенциометрами 3 и 4, 2 - вспомогательный генератор (генератор смещения); 3-потенциометр задающий; 4-потенциометр обратной связи, связанный с движением управляемого механизма; 5 - сопротивление для подачи смещения в цепь сетки тиратрона 6 и 7, дающих команды „вперед, назад и „стоп ; 8 и 9 - устройства, воспринимающие команду от тиратронов и включающие и выключающие двигатель 7; /О - сопротивления в цепи сеток тиратронов для связи с следящим устройством.
Схема по фиг. 1 работает следующим образом. Потенциометры 3 н 4 образуют элементарную следящую систему, которая обеспечивает надлежащее управление двигателем 7 через посредство тиратронов б (прямой ход) и 7 (обратный ход).
Расположенный на общем валу с двигателем / смещающий генератор 2 включен таким образом, что даваемое им смещение включает тиратроны с опережением, зависящим от скорости управляемого механизма. Соответствие между внешней характеристикой смещающего генератора и кривой, изображающей путь, проходимый управляемым механизмом в период выбега, в зависимости от скорости, имевщей место в момент подачи команды „стоп, достигается комбинированной системой возбуждения генератора 2 и использованием его нелинейных характеристик.
Если двигатель / неподвижен, расстройки между звеньями следящей системы нет (ток в сопротивлениях /О отсутствует).
Если путем переключения (или иной операции), производимого от командного аппарата (на фиг. 1 не показан), возникает небаланс между звеньями следящей системы, то появляется ток в сопротивлениях /(. Напряжение на сопротивлении JO через исполнительные аппараты автоматики (условно представленные на фиг. 1 тиратроном 6 и обмоткой S) приведет к включению контактора и двигатель 7 начинает работать.
Работа тиратронов б и /селективна, т. е. работает только один из них. При одном и том же направлении тока, текущего в сопротивлениях W,
к сетке тиратронов подаются напряжения, равные по величине, но разные по полярности.
Жестко связанный с двигателем / вспомогательный генератор 2 посылает ток в сопротивление 5. Направление этого тока таково, что вызываемое им падение напряжения в сопротивлении 5 геометрически вычитается из напряжения в цепи сетки, обусловленного токами небаланса в сопротивлениях 10, включенных в диагональ следящей системы. Как видно по схеме фиг. 1, в цепи сетки каждого из тиратронов действует напряжение, равное алгебраической сумме напряжения на сопротивлении Ю (от тока небаланса следящей системы) и напряжения на сопротивлении 3 (от генератора 2). Как известно, в результате действия обратной связи баланс в следящей системе при работе двигателя восстанавливается. В схеме по фиг. 1 тиратрон б сработает (выключит двигатель) ранее, чем восстановится баланс в следящей системе, так как при равенстве напряжений (они различны по полярности) на сопротивлениях W и 5 результирующее напряжение на сетке тиратрона будет равно нулю. Ясно, что опережение включения будет тем больще, чем больше скорость двигателя / (а следовательно, и напряжения на сопротивлении 5, обусловленного током, посылаемым генератором 2), что и требуется.
Вариант предлагаемого устройства, в применении к случаю использования в качестве следящей системы аппаратов типа „сельсин, изображен на фиг. 2. Здесь имеются следующие обозначения: 12-передача к следящему устройству; 75-муфта для соединения двигателя с механизмом; J4- следящее устройство типа „сельсин ; 75-элемент устройства, воспринимающий рассогласование между элементами 7 и 76 и воздействующий на аппаратуру, управляющую двигателем 7; 76 - задающее звено следящего устройства типа „сельсин ; 77- моментный двигатель, действующий на звено 76 следящего устройства к смещающий установку последнего в зависимости от скорости управляемого механизма; 18-пружины; 19 - соединительные муфты.
Работа двигателя / в схеме по фиг. 2 зависит от рассогласования между элементами (индукционными машинами) J4 и 76 следящего устройства. Путем помещения на вал двигателя / генератора смещения 2 получается возможность автоматически воздействовать на установку задающего элемента индукционного следящего устройства (типа ,сельсин) таким образом, что угол рассогласования делается зависимым от скорости управляемого механизма. Это обстоятельство позволяет получить искомую зависимость между величиной опережения и скоростью двигателя /.
Механизм воздействия действует следующим образом. Генератор 2 питает моментный двигатель /7, расположенный на общем валу с подвижной частью „сельсина.
К валу приделаны пружины 18, что обеспечивает зависимость между углом поворота подвижной части „сельсина и скоростью управляемого механизма.
Звено 16 следящего устройства (задающий „сельсин) .принципиально отличается по. конструкции от существующих типов тем, что его установка во время работы меняется в зависимости от скорости двигателя 7.
Если главный двигатель 7 неподвижен, то угол рассогласования между индукционными мащинами 14 и 76 синхронной связи равен нулю. Ток во вторичной цепи мащин синхронной связи разен нулю, равно нулю также и напряжение на сопротивлении 75.
Если командо-аппарат создал некоторый угол рассогласования между индукционными мащинами 14 и 16, то в результате получится напряжение на сопротивлении 15, вследствие чего через вспомогательную аппаратуру включается в работу двигатель 7.
Жестко сидящий на валу двигателя 7 генератор 2 посылает ток в моментный двигатель 77, действующий, как показано на фиг. 2, на мащину 76 синхронной связи в сторону уменьшения рассогласования между мащинами 76 и 14. Пружина 18 дает эффект пропорциональности между углом поворота моментного двигателя 77 (и
жестко связанной с ним машины 76) и скоростью двигателя 1.
В результате работы двигателя 7 угол рассогласования между машинами 76 и 14 стремится к нулю.
Это состояние (угол рассогласования равен нулю) наступит раньше, чем в том случае, если бы не было моментного двигателя 77 с пружиной, который, как это видно из вышесказанного, приближает момент установления баланса и тем раньше, чем с большей скоростью вращается двигатель 7.
Схемы по фиг. 1 и 2 являются схемами принципиальными; из них намеренно удалены вспомогательные аппараты, передающие команду контакторам, и т. п. Точно так же не изображены схемы возбуждения вспомогательного генератора 2, обеспечивающие заранее заданную (криволинейную) зависимость между э. д. с. (или моментом) и скоростью двигателя 7.
Конструкция задающего звена синхронной связи схемы фиг. 2 предлагается в двух вариантах, схематически изображенных на фиг. 3 и 4. Здесь имеются следующие обозначения: 27- статор с обмоткой возбуждения; 22- ротор; 23- контактные кольца ротора; 24 - стойки подшипников ротора; 25-оправа статора (статор может быть повернут на любой угол); 26 - шкала, жестко соединенная со статором (фиг. 3) или с ротором (фиг. 4); 27-неподвижный указатель положения; 28-муфта для соединения с моментным двигателем 77; 29-оправа для пружин 18 ротора.
При неподвижном положении управляемого механизма ротор 22 стоит также в неподвижном положении.
Необходимая величина угла рассогласования может быть достигнута поворотом статора 27 в оправе 25. Величину угла покажет неподвижно укрепленный указатель 27 на шкале 26, укрепленной на статоре 27.
В рабочем состоянии моментный двигатель 77 через муфту будет действовать в сторону уменьшения угла рассогласования, что приведет к опережению операции включения. Момент пружины 18 противодействует
моменту, развиваемому моментным двигателем 77.
В варианте по фиг. 4 статор 21 | сельсина неподвижен, ротор 22 соединен с осью, на которой он ара- щается на скользящей опоре 20, по- ; средством муфты 30, допускающей соединение при любых углах относительного поворота ротора и муфты 30 : между собою.
Установка угла рассогласования достигается простым поворотом ротора на оси; муфта 30 при этом разъеди- j иена. Угол отсчитывается на щкале26, закрепленной на роторе, по неподвижному указателю 27.
После установки ротор22 сцепляется с осью, связанной через посредство глухой муфты 28 с моментным двигателем /7.
На оси расположено приспособление с пружинами /5, натяжение которых определяет угол добавочного смещения ротора 22, обусловливаемого действием моментного двигателя 77.
В дополнение к сказанному можно отметить следующее. Угол поворота машины 76 (фиг. 2) ограничен, но путем введения зубчатых передач возможно увеличить (или уменьшить) величину угла опережающего смещения в несколько раз. Явтор специально оговаривает возможность осущ.ествления связи между машинами 77 и 76 с переменным передаточным числом, что может иметь особые преимуидества для специальных целей.
Предмет изобретения.
1.Устройство для управления на расстоянии при помощи следящей системы, отличающееся тем, что, с целью автоматического изменения опережения отключения управляемого двигателя при различных скоростях отрабатывания заданного ему перемещения, на валу указанного двигателя насажен вспомогательный генератор, напряжение которого служит для сдвигания в сторону опережения равновесного положения следящей системы.
2.Форма выполнения устройства по п. 1, отличающаяся тем, что генератор служит для подачи смещающего напряжения в цепь сетки ионных приборов потенциометрического следящего устройства.
3.Форма выполнения устройства по п. 1, отличающаяся тем, что генератор служит для питания серводвигателя, предназначенного поворачивать одну из частей следящей системы, находящуюся под воздействием пружины.
4.Форма выполнения устройства по п. 3, отличающаяся тем, что поворотная часть следящей системы соединена с находящейся под воздействием пружины и жестко сцепленной с валом серводвигателя осью при помощи муфты, например, электромагнитной, предназначенной осуществлять сцепление после установки поворотной части следящей системы на заданный угол.
сриг. а
21
а11иг.4
(//////////// // /////f/////////////,


| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО для АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ МАГИСТРАЛЬНЫМ ЭЛЕКТРОВОЗОМ | 1966 |
|
SU187079A1 |
| Синхронно-следящая система | 1943 |
|
SU68080A2 |
| Следящий привод | 1941 |
|
SU67550A1 |
| ПРОГРАММНО-СЛЕДЯЩЕЕ УСТРОЙСТВО | 1937 |
|
SU61116A1 |
| УСТРОЙСТВО для УПРАВЛЕНИЯ МОЛ1ЕНТНЫМ ЭЛЕКТРОДВИГАТЕЛЕМ | 1969 |
|
SU243687A1 |
| Стенд для испытания двух взаимосвязанных электроприводов | 1980 |
|
SU957137A1 |
| СИСТЕМА УПРАВЛЕНИЯ РЕЖИМОМ ЖИДКОСТНОГО РАКЕТНОГО ДВИГАТЕЛЯ | 1997 |
|
RU2119186C1 |
| ПЛАВУЧАЯ ВЕТРОЭЛЕКТРИЧЕСКАЯ УСТАНОВКА | 1998 |
|
RU2173280C2 |
| Масштабно-дистанционная фотокопировальная система | 1955 |
|
SU121164A1 |
| КУРСОВАЯ СИСТЕМА | 2004 |
|
RU2279636C1 |

Тип. „Печатный Труд-. Зак. 2673-700
cdur 1
19
5 О 5 /а
CD И Г. 2
