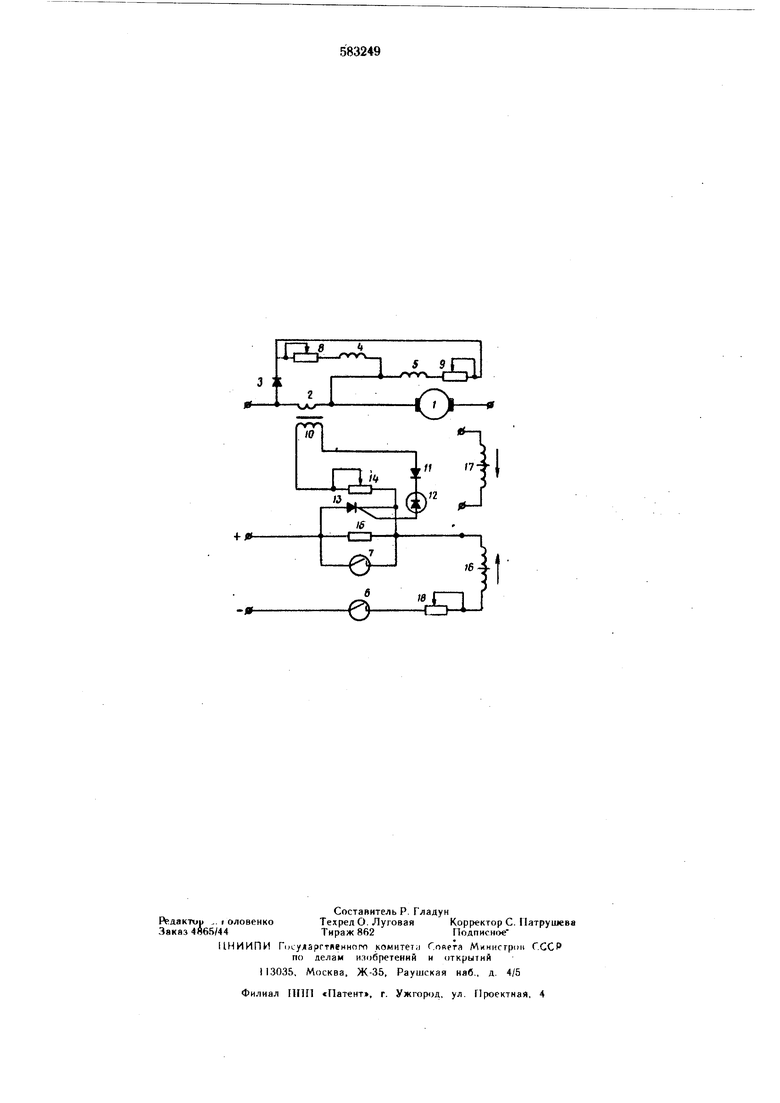
На чертеже изображена схема устройства для управления напорным механизмом экскаватора. Устройство для управления напорным механизмом экскаватора содержит якорь двигателя рабочего органа (подъема) 1, обмотку 2 дополнительных полюсов генератора, параллельно которой включены через диод 3 обмотки 4 и 5 двух нормально открытых магнитоуправляемых контактов 6 и 7, пороги срабатывания которых регулируются резисторами 8 и 9. В цепь стабилизирующей обмотки 10, через диод И и стабилитрон 12, включен управляющий электрод тиристора 13. Регулирование порога срабатывания тиристора осуществляется резистором 14. Анод-катодный переход тиристора включен параллельно балластному сопротивлению 15 и второму магнитоуправляемому контакту 7, подсоединенным к началу обмотки 16 автоматизации магнитного усилителя генератора напора, включенной встречно задающей обмотке 7. Регулирование ампер-витков обмотки автома(изацин осуществляется резистором 18. Работа устройства осуществляется следующим образом. После подведения ковща к забою машинист ставит командоконтроллеры рабочего органа (подъема) и напора в положение, соответствующее максимальной скорости рабочих движений, и подает напряжение в цепь обмотки 16 автоматизации. По достижении силой тока двигателя рабочего органа (подъема) 80% от тока отсечки замыкается первый магнитоуправляемый контакт 6, обеспечивая питание обмотки 16 через балластное сопротивление 15 и резистор 18. К работе подготавливается тиристор 13, включенный на падение напряжения на балластном сопротивлении 15. Так как обмотка 16 включена встречно задающей обмотке 17, то скорость напора уменьщится или станет равной нулю, в зависимости от настройки резистора 18. При дальнейщем увеличении тока двигателя I замкнется второй магнитоуправляемый контакт 7, шунтирующий балластное сопротивление 15. При этом ампер-внтки обмотки 16 автоматизации превысят ампер-витки задающей обмотки 17. Произойдет реверсирование двигателя напора и уменьщение толщины стружки. При стопореннн исполнительного органа сила тока двигателя J возрастает с интенсивностью, большей заданной и определяемой стабилитроном 12 и резистором 14. В стабилизирующей обмотке 10, расположенной на дополнительных полюсах, наводится имТ1ульс ЭДС, достаточный для того, чтобы пробить стабилитрон 12 и открыть тиристор 13, который защунтирует балластное сопротивление 15, обеспечивая реверс двигателя напора. После снижения силы тока до величины, меньшей порога первого магнитоуправляемого контакта 6 последний размыкается и разрывает цепь обмотки 16, обеспечивая движение напора вперед и закрываятиристор 13, который вновь готов к работе. Таким образом, устройство для управления напорным механизмом имеет два статических порога, определяемых порогами срабатывания магнитоуправляемых контактов 6 и 7, и динамический порог, определяемый стабилитроном 12 и тиристором 13. Диод 3 препятствует работе схемы при опускании ковща, а диод 11 предотвращает срабатывание тиристора 13 при резком уменьшении силы тока двигате,11я . Использование устройства исключает субъективное влияние машиниста на процесс управления, так как машинист реагирует на уже сверщивщееся событие - стопорение ковща в забое или не полностью заполненный ковщ - и обеспечивает работу экскаватора при черпании в режиме максимальной мощности привода рабочего органа (подъема), позволяя получить максимальную производительность. Формула изобретения Устройство для управления напорным механизмом экскаватора, содержащее обмотку дополнительных полюсов генератора рабочего органа, магнитный усилитель генератора напора, диоды, резисторы и источник питания, отлимающееся тем, что, с целью повышения производительности экскаватора и снижения динамических нагрузок, оно снабжено тиристором, стабилитроном и двумя магнитоуправляемыми контактами, обмотки которых подключены параллельно обмотке дополнительных полюсов ге.нератора рабочего органа, а в цепь его стабилизирующей обмотки через диод и стабилитрон подключен управляющий вход тиристора, параллельно которому подключены резистор и один из магнитоуправляемых контактов, подсоединенные к источнику питания, резистору цепи стабилизирующей обмотки и началу управляющей обмотки магнитного усилителя генератора напора, конец которой через резистор и второй магнитоуправляемый контакт.соединен с источ;Ником питания, причем управляющая обмотка включена встречно задающей. Источники информации, принятые во внимание при экспертизе: 1. Авторское свидетельство СССР № 412354, кл. Е 02 F 5/20,1974. 2. Сатовский Б. И. и др. Современные карьерные экскаваторы. М., «Недра, 1971, с. 284-288.
-0
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО для ОГРАНИЧЕНИЯ ДИНАМИЧЕСКИХ УСИЛИЙ В ОДНОКОВШОВЫХ ЭКСКАВАТОРАХ | 1972 |
|
SU347408A1 |
| Устройство для защиты асинхронного двигателя от перегрузки | 1980 |
|
SU961027A1 |
| УСТРОЙСТВО ЗАЩИТЫ ОТ ВНУТРЕННИХ ПЕРЕНАПРЯЖЕНИЙ ТРЕХФАЗНЫХ ЭЛЕКТРИЧЕСКИХ СЕТЕЙ С ИЗОЛИРОВАННОЙ НЕЙТРАЛЬЮ (ВАРИАНТЫ) | 2001 |
|
RU2232457C2 |
| Устройство для температурной защиты электродвигателя | 1982 |
|
SU1120444A1 |
| Способ управления электроприводом напора экскаватора и устройство для его осуществления | 1986 |
|
SU1430475A1 |
| Устройство для защиты блоков генератор-трансформатор от замыканий на землю | 1984 |
|
SU1224892A1 |
| Устройство для контроля и учета работы экскаватора | 1979 |
|
SU959119A1 |
| Устройство для управления электромагнитом постоянного тока | 1985 |
|
SU1282224A1 |
| УСТРОЙСТВО ДЛЯ ЗАЩИТЫ ЭЛЕКТРИЧЕСКОЙ МАШИНЫ ПЕРЕМЕННОГО ТОКА ОТ АНОРМАЛЬНЫХ РЕЖИМОВ | 1994 |
|
RU2069435C1 |
| УСТРОЙСТВО ДЛЯ ЗАЩИТЫ ЭЛЕКТРО- И ТЕХНОЛОГИЧЕСКОГО ОБОРУДОВАНИЯ | 1993 |
|
RU2117380C1 |