Предлагаемое изобретение касается прицельного для летательных аппаратов приспособления с линией прицеливания, наклон которой относительно вертикали, находящейся в вертикальной плоскости направления полета, устанавливается согласно определяемого из уравнения
угла опережения. В этом уравнении: Vg обозначает собою скорость, равнодействующую собственной скорости летательного аппарата и скорости, придаваемой ему ветром; это - скорость летательного аппарата относительно земли; Н - высоту летательного аппарата над землею, t - время падения бросаемой с этой высоты бомбы и R - величину отставания, т.-е. то расстояние, на которое бомба отстает по сравнению с тем случаем, когда она в безвоздушном пространстве достигла бы поверхности земли. При этом делается допущение, что сопротивление воздуха действует на бомбу только в плоскости ее полета.
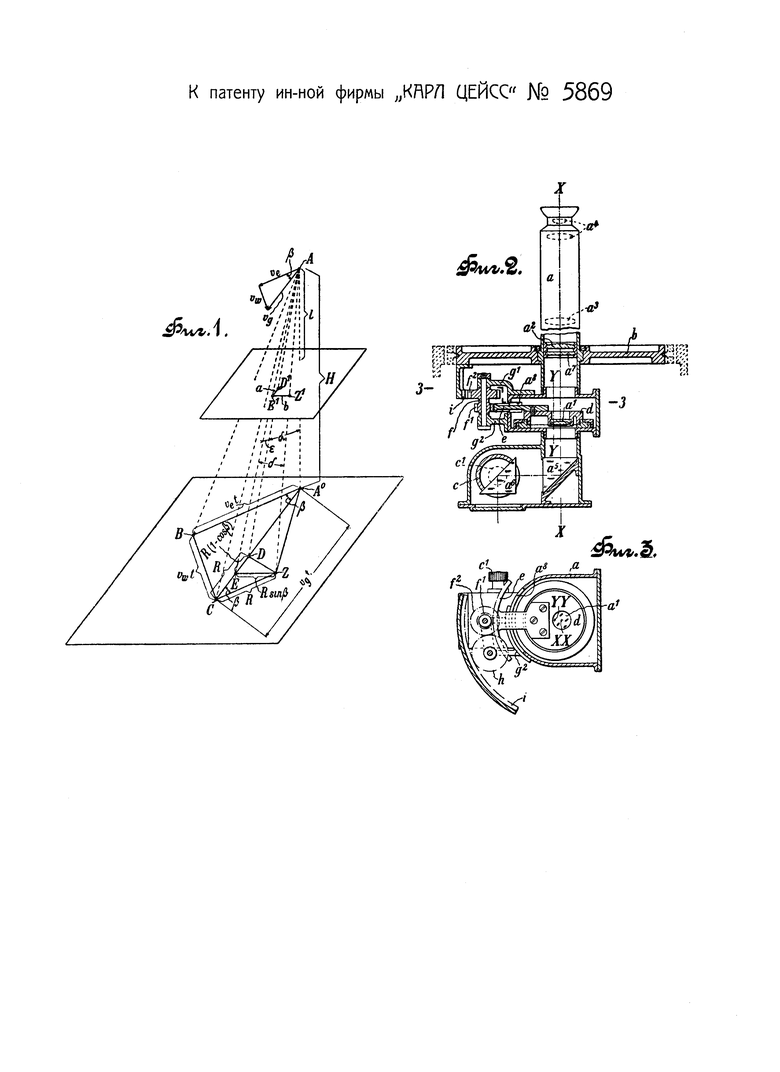
На фиг. 1 прилагаемых чертежей приведена геометрическая схема, из которой уясняются основания устройства предлагаемого прицельного приспособления. Там А - место нахождения летательного аппарата на высоте Н, над точкой  на поверхности земли; аппарат имеет собственную скорость Ve от действия мотора и скорость
на поверхности земли; аппарат имеет собственную скорость Ve от действия мотора и скорость  , придаваемую ему действием ветра, так что он обладает равнодействующей скоростью полета Vg над землей. В безвоздушном пространстве, бомба, брошенная при полном безветрии, достигла бы земли в точке В, а при скорости от ветра, равной , в точке С, при чем В параллельно Ve и, если t есть время полета бомбы, то В=Vet. Равным образом, ВС параллельно и равно t. Вследствие же сопротивления воздуха, бомба в действительности не достигает точки С, а - другой точки, отстающей от С на расстояние R. Известные до сих пор прицельные приспособления, учитывающее запаздывание бомбы, строились с тем допущением, что сопротивление воздуха действует лишь в вертикальной плоскости, определяемой направлением полета, и что поэтому запаздывание R бомбы будет параллельно Vg, так что бомба упадет на землю в точке D. Этому допущению соответствует угол опережения в этой плоскости, который определяется из чертежа уравнением:
, придаваемую ему действием ветра, так что он обладает равнодействующей скоростью полета Vg над землей. В безвоздушном пространстве, бомба, брошенная при полном безветрии, достигла бы земли в точке В, а при скорости от ветра, равной , в точке С, при чем В параллельно Ve и, если t есть время полета бомбы, то В=Vet. Равным образом, ВС параллельно и равно t. Вследствие же сопротивления воздуха, бомба в действительности не достигает точки С, а - другой точки, отстающей от С на расстояние R. Известные до сих пор прицельные приспособления, учитывающее запаздывание бомбы, строились с тем допущением, что сопротивление воздуха действует лишь в вертикальной плоскости, определяемой направлением полета, и что поэтому запаздывание R бомбы будет параллельно Vg, так что бомба упадет на землю в точке D. Этому допущению соответствует угол опережения в этой плоскости, который определяется из чертежа уравнением:
Но в действительности направление запаздывания бомбы - параллельно Ve, так что бомба упадет в Z, при чем точка Z тем дальше от D, чем больше угол β, образуемый собственной скоростью аппарата Ve со скоростью Vg полета над землей. Если β=0, т.-е., если аппарат летит по ветру или против ветра, то Z и D совпадают. Таким образом, только в этом случае указанное допущение верно. Во всех других случаях следует производить поправку в наклоне прицельной линии.
Предлагаемое изобретение имеет целью получение этой поправки помощью особого приспособления, посредством которого линии прицела может быть придано, с одной стороны, изменение наклона, падающее в вертикальную плоскость, определяемую направлением полета, и с другой стороны - направленное перпендикулярно к этой вертикальной плоскости. Если на фиг. 1 опустить перпендикуляр из Z на С, который пересечет этот отрезок в Е, то изменение наклона в этой вертикальной плоскости - изменение опережения - определяется углом DAE=Σ, и изменение наклона в направлении, перпендикулярном к этой плоскости - изменение бокового направления - определяется углом EAZ=δ, при чем эти углы, как выводится легко из чертежа, вычисляются по следующим уравнениям:
Если представить себе, что ниже точки А, на расстоянии  от точки А (фиг 1), находится параллельная земле плоскость - земля принята в пределах цели плоской - то эта плоскость пересечет лучи АЕ, AD и AZ соответственно в точках Е′, D′ и Z′, при чем, как это легко вывести,
от точки А (фиг 1), находится параллельная земле плоскость - земля принята в пределах цели плоской - то эта плоскость пересечет лучи АЕ, AD и AZ соответственно в точках Е′, D′ и Z′, при чем, как это легко вывести,
Если теперь представить себе, что имеется прицельное приспособление (например, диоптр с прорезью и мушка), в котором двумя частями (прорезью и мушкой) определяются две точки линии прицеливания, так что одна часть (прорезь) определяет точку А этой линии, а другая часть (мушка) определяет вторую ее точку в этой же плоскости, то для производства поправки в наклоне линии прицеливания надо будет передвинуть вторую часть прицельного приспособления (мушку), в пределах воображаемой плоскости, по направлению полета на величину а, при чем она перейдет из D в Е′; что касается составляющей ветра, перпендикулярной к направлению полета, то ее надо будет переместить на величину b, при чем мушка перейдет из Е′ в Z′. Для установки этой части прицельного приспособления может служить, например, система, состоящая из салазок, движущихся по двум перпендикулярным направлениям. Так как, при принятой определенной форме бомбы и постоянной собственной скорости аппарата Ve, частное  , а вместе с тем - при постоянном - и величина
, а вместе с тем - при постоянном - и величина  могут считаться постоянными, то установки обоих салазок этой системы будут изменяться лишь в зависимости от угла β, составляемого собственной скоростью Ve аппарата со скоростью Vg относительно земли, так что установки салазок могут быть легко произведены соответственно шкалам, построенным для функций (1 - cos β) или sin β.
могут считаться постоянными, то установки обоих салазок этой системы будут изменяться лишь в зависимости от угла β, составляемого собственной скоростью Ve аппарата со скоростью Vg относительно земли, так что установки салазок могут быть легко произведены соответственно шкалам, построенным для функций (1 - cos β) или sin β.
Как легко видеть, эта часть прицельного приспособления, вместо двух перемещений a и b может быть приведена на свое место из D′ в Z′ посредством одного вращения на угол β в установочной плоскости. При этом центр вращения этой части должен находиться на расстоянии  от D′, притом так, чтобы этот центр вращения всегда находился вместе с точкой D′ на направлении полета, а именно - перед точкой D′; далее, направление вращения должно быть обратным направлению того вращения, которое летательный аппарат получает от действия ветра.
от D′, притом так, чтобы этот центр вращения всегда находился вместе с точкой D′ на направлении полета, а именно - перед точкой D′; далее, направление вращения должно быть обратным направлению того вращения, которое летательный аппарат получает от действия ветра.
Та плоскость, в которой перестанавливается часть прицельного приспособления, может находиться также на расстоянии вверх от точки А. В этом случае, перемещения а и b переставной части прицельного приспособления должны получить обратное направление по сравнению с только - что рассмотренным случаем, или, в случае замены передвижений вращением, центр вращения этой части надо было бы брать на расстоянии же r, но за точкой D′.
Следующий практический случай, это, например, тот, когда выбранная нами плоскость не параллельна к поверхности земли, но всегда остается перпендикулярной к линии прицеливания, установленной соответственно углу опережения α. Тогда, как легко вывести, если расстояние плоскости до А равно , величины а′ и b′, соответствующие в данном случае величинам а и b, определяются из уравнений:
Таким образом, если опять предположить величину  постоянной, то а′ и b′ будут изменяться не только в зависимости от угла β, как а и b, но и в зависимости от изменения угла опережения α, притом а′ - пропорционально квадрату косинуса α, а b′ - пропорционально косинусу α. Если в этом случае, ту часть прицельного приспособления, которая должна была быть устанавливаема соответственно изменению добавочного угла наклона, надо, как выше было объяснено, перевести в ее новое положение посредством вращения, производимого в ее установочной плоскости, то надо вычислить соответствующую расстоянию r среднюю приближенную величину расстояния r′' для центра вращения, мирясь с привходящей незначительной ошибкой установки. Для того, чтобы ошибка эта, в среднем, была возможно малой, расстояние r′ рекомендуется выбрать соответственно уравнению:
постоянной, то а′ и b′ будут изменяться не только в зависимости от угла β, как а и b, но и в зависимости от изменения угла опережения α, притом а′ - пропорционально квадрату косинуса α, а b′ - пропорционально косинусу α. Если в этом случае, ту часть прицельного приспособления, которая должна была быть устанавливаема соответственно изменению добавочного угла наклона, надо, как выше было объяснено, перевести в ее новое положение посредством вращения, производимого в ее установочной плоскости, то надо вычислить соответствующую расстоянию r среднюю приближенную величину расстояния r′' для центра вращения, мирясь с привходящей незначительной ошибкой установки. Для того, чтобы ошибка эта, в среднем, была возможно малой, расстояние r′ рекомендуется выбрать соответственно уравнению:

при чем αmах обозначает наибольшее, а αmin - наименьшее значение угла опережения.
Для разобранных случаев, в которых требуемая поправка наклона линии прицеливания производится вращением части прицельного приспособления, оказывается, что, если в качестве прицельного приспособления служит прицельная подзорная труба, в плоскости изображений которой помещена вращающаяся относительно летательного аппарата (сама по себе или вместе с трубою) продольная метка, устанавливаемая по направлению полета, при чем в этой трубе это дополнительное изменение наклона производится установкой объектива в плоскости, перпендикулярной к ее оси, то особенно целесообразной формой осуществления будет та, в которой объектив будет сделан вращающимся около оси, параллельной оси этого объектива, и будет связан с этой продольной меткой (или, если эта продольная метка вращается вместе с трубой, то объектив связан с трубою) таким образом, что при вращении ее он повернется на тот же угол, но в обратном направлении. При этом, оси вращения объектива надо придать такое положение, чтобы она находилась при среднем положении объектива, вместе с осью его, в вертикальной плоскости, параллельной этой продольной марке. Труба устанавливается тогда на летательном аппарате таким образом, что эта вертикальная плоскость содержит направление собственной скорости аппарата и, именно так, что ось вращения объектива расположена с той стороны объектива, которая обращена к цели. При этом указание относительно взаимного положения оси объектива и оси вращения его касается такой трубы, в которой объектив представляет собою самую переднюю часть оптической системы. В случае применения перед объективом зеркальной системы, это указание относительно взаимного расположения частей применимо, соответственно, к отраженному зеркальной системой изображению обеих осей. Расстояние оси вращения объектива от оси его, поскольку оптическая ось трубы при установке угла опережения α остается вертикальной (если установка угла опережения производится установкой визирной метки) или получает наклон на угол α (если установка угла опережения производится наклоном всей трубы или вращением установленной перед объективом зеркальной системы), будет равно или
при чем для надо подставить фокусное расстояние объектива.
На фиг. 2 и 3 показана отвечающая изобретению прицельная труба в боковом виде и в плане. Труба а вращается около своей продольной оси X-X, внутри кольца b с карданным подвесом, как показано пунктиром. Оптическая система трубы состоит из объектива а1, сложной линзы а2, обращающей изображение линзы а3, окуляра а4 и установленной перед объективом зеркальной системы, которая состоит из двух прямоугольных, с одинаковыми гранями зеркальных призм, одна из которых, а5, закреплена наглухо, а другая - а6, принимающая лучи света, помещена во вращающейся втулке, ось вращения которой перпендикулярна к главному сечению призмы а5. Во вращающейся втулке эта призма а6 установлена так, что ее главное сечение параллельно такому же сечению призмы а5, и ось вращения втулки с лежит в зеркальной плоскости призмы. Помощью кнопки с1 и не показанного на чертеже приспособления для указания углов, втулка с, а с нею и призма а6, может быть установлена соответственно найденной тем или иным способом величине угла опережения.
Перед линзой а2 установлена пластинка а7 с делениями, снабженная перекрестием, одна черта которого параллельна главному сечению призм а5 и а6. Объектив а1 трубы поддерживается кольцом d, которое может вращаться в кожухе трубы таким образом, что ось вращения его Y-Y параллельна оси вращения X-X трубы, при чем обе оси лежат в плоскости, параллельной главному сечению призм а5 и а6. Кроме того, ось вращения Y-Y находится с той стороны объектива, которая обращена к призме а6, и взаимное расстояние обеих осей имеет величину:

где - фокусное расстояние объектива, R - запаздывание бросаемой с высоты Н бомбы, αmах - наибольший, αmin - наименьший из встречающихся углов опережения. С кольцом d свинчен вместе зубчатый сектор е, начальная окружность которого концентрична с кольцом d, имея общую с ним ось Y-Y. Этот сектор через прорезь а8 в стенке трубы сцепляется с зубчатым оборотом f1 колеса f, установленного между опорами g1, g2 на трубе так, что может вращаться около оси, параллельной оси вращения кольца d, при чем оно составляет одно целое с зубчаткой f2, ось которой совпадает с осью зубчатки f1. С этим вторым колесом f2 сцепляется зубчатка h, которая в свою очередь сцепляется с приделанным к кольцу b зубчатым ободом i, начальная окружность которого концентрична с осью вращения X-X трубы. Таким образом, колесо h катится по неподвижному зубчатому ободу i, если труба и соединенные с нею части (зубчатые передачи и система призм) вращаются около оси X X трубы и, вследствие этого качения, объектив а1 будет поворачиваться около своей (эксцентрической) оси вращения Y-Y. При этом, передаточные числа зацеплений подобраны так, чтобы при повороте трубы в кольце b, кольцо d, поддерживающее объектив а1, поворачивалось бы на тот же угол и в обратном направлении. Объектив а1 надо устанавливать в кольце d таким образом, чтобы его ось в (показанном на чертеже) среднем положении зубчатого колеса h относительно зубчатого обода i, которое соответствует также среднему положению зубчатого сектора е относительно зубчатки f1, совпадала бы с осью вращения X-X трубы.
Для пользования трубою а для наводки, кольцо снабжено карданным подвесом у летательного аппарата, таким образом, что ось вращения X-X, около которой труба вращается внутри кольца b, направлена вертикально и что, при том положении трубы относительно кольца, в котором ось объектива совпадает с осью X-X, главное сечение призм a5 и а6 параллельно продольной оси летательного аппарата. Призма а6 должна быть при этом направлена к переднему концу летательного аппарата. Далее, для пользования трубою надо только установить вращением кнопки с1, призму а6, соответственно вычисляемому из уравнения

или каким-либо иным образом определяемому углу опережения α, и повернуть трубу относительно кольца b таким образом, чтобы изображения видимых в трубу предметов проходили бы через поле зрения, параллельно главному сечению призм а5 и а6 и проведенной параллельной черте на пластинке а7, так, чтобы эта черта совпадала бы с направлением полета. Поправка наклонения прицельной линии, которая получилась при отклонении полета от направления, определяемого положением продольной оси летательного аппарата, производится вращением трубы, вследствие происшедшего от того поворота объектива а1, автоматически, так что, если бомба будет брошена в тот момент, когда прицельная линия пересекает подлежащую поражению цель, то эта цель будет поражена.
Прицельное приспособление для летательных аппаратов, с применением для прицельной наводки зрительной трубы, в плоскости изображения которой имеется продольная метка, вращаемая относительно летательного аппарата и устанавливаемая по направлению полета, в каковом аппарате добавочное изменение наклона прицельной линии производится перестановкой объектива в плоскости, перпендикулярной к оси трубы, характеризующееся тем, что, с целью сообщения прицельной линии такого добавочного изменения наклона, которое получается из двух составляющих, одной совпадающей с этой вертикальной плоскостью, а другой, направленной перпендикулярно к ней, - объектив а1 устроен поворотным вокруг оси Y-Y, параллельной его оптической оси, которая при среднем положении объектива находится вместе с его осью в вертикальной плоскости, параллельной продольной метке, каковой объектив а1 таким образом связан с этой продольной меткой, чтобы при ее вращении он также поворачивался на такой же угол, но только в противоположном направлении.
