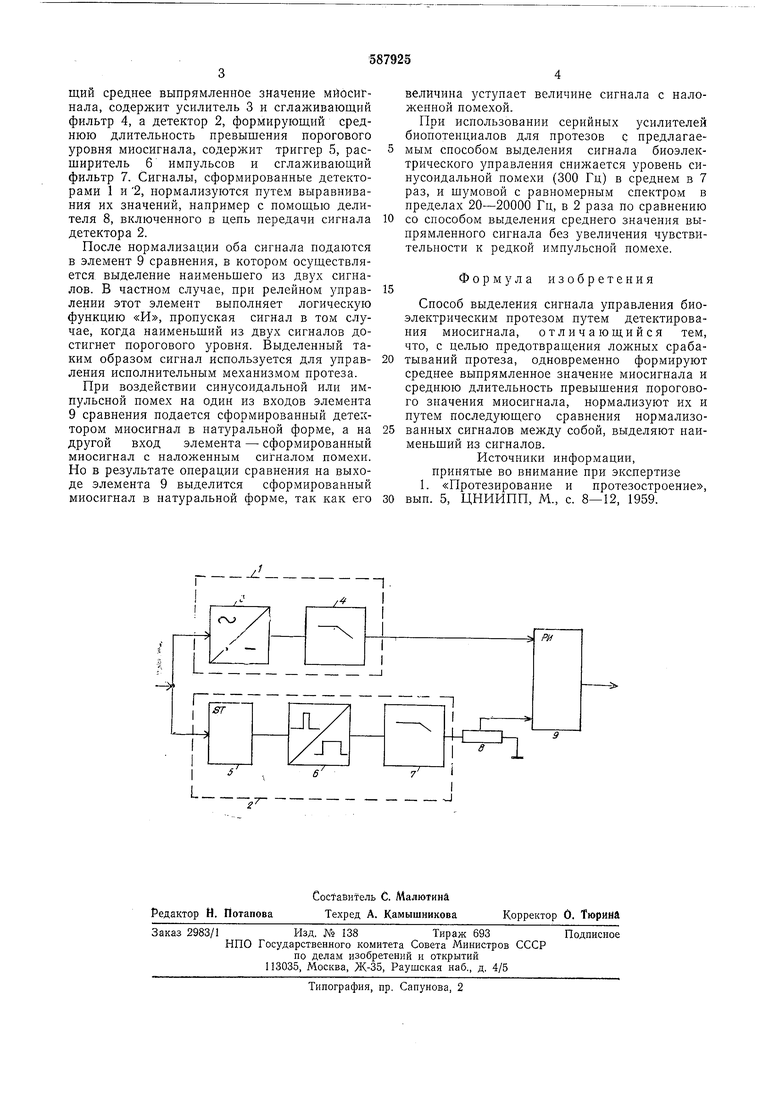
щий среднее выпрямленное значение мйоснг-нала, содержит усилитель 3 и сглаживающий фильтр 4, а детектор 2, формирующий среднюю длительность превышения порогового уровня миосигнала, содержит триггер 5, расширитель б импульсов и сглаживающий фильтр 7. Сигналы, сформированные детекторами 1 и 2, нормализуются путем выравнивания их значений, например с помощью делителя 8, включенного в цепь передачи сигнала детектора 2.
После нормализации оба сигнала подаются в элемент 9 сравнения, в котором осуществляется выделение наименьшего из двух сигналов. В частном случае, при релейном управлении этот элемент выполняет логическую функцию «И, пропуская сигнал в том случае, когда наименьший из двух сигналов достигнет порогового уровня. Выделенный таким образом сигнал используется для управления исполнительным механизмом протеза.
При воздействии синусоидальной или импульсной помех на один из входов элемента 9 сравнения подается сформированный детектором миосигнал в натуральной форме, а на другой вход элемента - сформированный миосигнал с наложенным сигналом помехи. Но в результате операции сравнения на выходе элемента 9 выделится сформированный миосигнал в натуральной форме, так как его
величина уступает величине сигнала с наложенной помехой.
При использовании серийных усилителей биопотенциалов для протезов с предлагаемым способом выделения сигнала биоэлектрического управления снижается уровень синусоидальной помехи (300 Гц) в среднем в 7 раз, и шумовой с равномерным спектром в пределах 20-20000 Гц, в 2 раза по сравнению
со способом выделения среднего значения выпрямленного сигнала без увеличения чувствительности к редкой импульсной помехе.
Формула изобретения
Способ выделения сигнала управления биоэлектрическим протезом путем детектирования миосигнала, отличающийся тем, что, с целью предотвращения ложных срабатываний протеза, одновременно формируют среднее выпрямленное значение миосигнала и среднюю длительность превышения порогового значения миосигпала, нормализуют их и путем последующего сравнения нормализованных сигналов между собой, выделяют наименьший из сигналов.
Источники информации, принятые во внимание при экспертизе 1. «Протезирование и протезостроение, вып. 5, ЦНИИПП, М., с. 8-12, 1959.
| название | год | авторы | номер документа |
|---|---|---|---|
| Детектор сигнала в системах биоэлектрического управления протезами (его варианты) | 1984 |
|
SU1247008A1 |
| Детектор миоэлектрического сигнала в системах биоэлектрического управления протезами | 1977 |
|
SU649426A1 |
| Устройство для определения временных интервалов активного состояния мышц | 1990 |
|
SU1766370A1 |
| СПОСОБ МИОЭЛЕКТРИЧЕСКОГО УПРАВЛЕНИЯ ИСКУССТВЕННОЙ КОНЕЧНОСТЬЮ (ВАРИАНТЫ) | 1995 |
|
RU2108768C1 |
| Узел управления биоэлектрических протезов | 1984 |
|
SU1245308A1 |
| Система биоадаптивного регулирования | 1983 |
|
SU1110441A1 |
| СПОСОБ УПРАВЛЕНИЯ АВТОНОМНЫМ АСИНХРОННЫМ ГЕНЕРАТОРОМ | 2015 |
|
RU2606643C1 |
| Система и способ формирования команд управления на основании биоэлектрических данных оператора | 2018 |
|
RU2738197C2 |
| СПОСОБ ОХРАННОЙ СИГНАЛИЗАЦИИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1992 |
|
RU2060555C1 |
| СПОСОБ УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДОМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1991 |
|
RU2076448C1 |
