Изобретение относится к электротехнике и может быть использовано для электроснабжения автономных объектов, требующих стабильную сеть переменного тока при переменной скорости вращения вала генератора.
Известен способ управления автономным асинхронным генератором с вентильным преобразователем в цепи ротора, заключающийся в воздействии сигналом по отклонению выходного напряжения генератора на вентильный преобразователь и поддержании постоянной частоты выходного напряжения при переменной скорости вращения ротора, в соответствии с которым частоту коммутации вентилей преобразователя задают по рассогласованию частот выходного напряжения и опорного генератора, формирующего постоянную частоту, причем частота коммутации вентилей преобразователя превышает частоту сети на величину, пропорциональную скорости вращения ротора [1].
Недостатком этого способа является невысокое качество выходного напряжения генератора при быстром изменении скорости вращения вала генератора из-за малого быстродействия и малой точности контура регулирования частоты. При изменении частоты вращения вала генератора изменяется задание на частоту напряжения ротора, однако из-за отсутствия датчика частоты вращения ротора, точность задания частоты напряжения ротора невысокая, кроме того, измерение выходной частоты генератора может быть выполнено с запаздыванием на часть периода выходного напряжения, что также снижает точность поддержания требуемой частоты выходного напряжения генератора. ШИМ-инвертор напряжения питает обмотку ротора прямоугольными импульсами напряжения, это приводит к повышенному уровню высших гармоник в выходном напряжении генератора.
Наиболее близким к изобретению по технической сущности и достигаемому результату является способ управления автономным асинхронным генератором с вентильным преобразователем в цепи ротора, заключающийся в воздействии сигналом по отклонению выходного напряжения генератора на вентильный преобразователь и поддержании постоянной частоты выходного напряжения при переменной скорости вращения ротора, причем частота напряжения на выходе преобразователя превышает частоту выходного напряжения генератора на величину, пропорциональную скорости вращения ротора, сигнал отклонения выходного напряжения генератора подают на пропорционально-интегральный регулятор, сигнал на выходе которого ограничивают при достижении предельно допустимого уровня, и формируют сигнал задания амплитуды синусоидального напряжения на выходе вентильного преобразователя, задают желаемую частоту вращения магнитного поля статора генератора, измеряют частоту вращения ротора генератора и вычисляют сумму этих частот, пропорционально которой формируют сигнал задания частоты синусоидального напряжения на выходе вентильного преобразователя, на основе сформированных сигналов задания амплитуды и частоты формируют сигналы задания мгновенных значений синусоидальных трехфазных напряжений на выходе вентильного преобразователя, смещенных относительно друг друга на угол 2π/3, подают эти синусоидальные сигналы на первые входы трех фазных релейно-гистерезисных регуляторов напряжения, измеряют сигналы мгновенных значений фазных напряжений на выходе вентильного преобразователя, подают эти сигналы на вторые входы релейно-гистерезисных регуляторов напряжения, в каждом релейно-гистерезисном регуляторе определяют отклонение между заданными и измеренными сигналами фазных напряжений, сравнивают отклонение с пороговым уровнем, при превышении которого подают на управляющие входы соответствующих фаз вентильного преобразователя сигналы управления, коммутируют ключевые элементы вентильного преобразователя и добиваются снижения отклонения между заданными и измеренными сигналами фазных напряжений на выходе вентильного преобразователя до значения, меньше чем пороговый уровень [2].
Недостатками этого способа является сложность поддержания постоянства напряжения на выходе генератора при изменении нагрузки, т.к. напряжение питания ротора, используемое для организации замкнутого контура управления, при изменении частоты тока ротора связано с током ротора, определяющим возбуждение двигателя, нелинейной зависимостью, что требует дополнительной форсировки напряжения возбуждения при увеличении частоты тока ротора; повышенная мощность вентильного преобразователя, т.к. частота тока ротора больше частоты выходного напряжения, при этом велико индуктивное сопротивление обмотки ротора, ограничивающее ток ротора; низкая помехоустойчивость системы управления, т.к. напряжение на выходе инвертора содержит помимо основной гармоники высшие гармоники и канал обратной связи по мгновенным значениям выходных фазных напряжений содержит большое количество помех.
Целью изобретения является улучшение стабилизации напряжения на выходе генератора при изменении нагрузки, повышение помехоустойчивости системы управления.
В предлагаемом способе управления автономным асинхронным генератором с вентильным преобразователем в цепи ротора, содержащим выпрямитель и инвертор, соединенные через сглаживающий реактор, заключающемся в воздействии сигналом по отклонению выходного напряжения генератора на вентильный преобразователь и поддержании постоянной частоты выходного напряжения при переменной скорости вращения ротора, причем частота напряжения на выходе преобразователя отличается от частоты выходного напряжения генератора на величину, пропорциональную скорости вращения ротора, в функции сигнала отклонения выходного напряжения генератора формируют сигнал задания мгновенных значений трехфазной синусоидальной выходной переменной инвертора, задают желаемую частоту вращения магнитного поля статора генератора, измеряют частоту вращения ротора генератора, на основе сформированных сигналов задания амплитуды и частоты формируют сигналы задания мгновенных значений синусоидальной трехфазной выходной переменной инвертора, смещенные относительно друг друга на угол 2π/3, подают эти синусоидальные сигналы на первые входы трех фазных релейно-гистерезисных регуляторов выходной переменной инвертора, измеряют сигналы мгновенных фазных значений выходной переменной инвертора, подают эти сигналы на вторые входы фазных релейно-гистерезисных регуляторов выходной переменной инвертора, в каждом релейно-гистерезисном регуляторе определяют отклонение между заданными и измеренными сигналами выходной переменной инвертора, сравнивают отклонение с пороговым уровнем, при превышении которого подают на управляющие входы соответствующих фаз вентильного преобразователя сигналы управления, коммутируют ключевые элементы вентильного преобразователя и добиваются снижения отклонения между заданными и измеренными сигналами выходной переменной инвертора до значения, меньшего, чем пороговый уровень, в качестве трехфазной выходной переменной инвертора используют мгновенные значения фазных токов, вычисляют разность частот вращения магнитного поля статора и частоты вращения ротора генератора, пропорционально которой формируют сигнал задания частоты синусоидального напряжения на выходе вентильного преобразователя, между выпрямителем и сглаживающим реактором включают ключевой элемент, а встречно-параллельно входу инвертора со сглаживающим реактором включают диод и образуют при отключении ключевого элемента цепь прохождения тока, протекающего за счет энергии, накопленной в обмотках двигателя и сглаживающего реактора, среди трех заданных синусоидальных фазных токов на выходе инвертора определяют наибольшее положительное мгновенное значение и наибольшее по модулю отрицательное мгновенное значение и вычисляют сумму модулей этих величин, среди трех измеренных фазных токов на выходе инвертора определяют наибольшее положительное мгновенное значение и наибольшее по модулю отрицательное мгновенное значение и рассчитывают сумму модулей этих величин, определяют отклонение между заданными и измеренными наибольшими значениями модулей разностей мгновенных значений фазных токов на выходе инвертора, сравнивают отклонение с пороговым уровнем, при превышении которого включают ключевой элемент в цепи постоянного тока, а когда это отклонение не превышает пороговый уровень, отключают ключевой элемент в цепи постоянного тока.
В предлагаемом способе управления автономным асинхронным генератором улучшена стабилизация напряжения на выходе генератора при изменении нагрузки, повышена помехоустойчивость системы управления, т.к. сигнал обратной связи по мгновенным значениям тока на выходе инвертора содержит значительно меньший уровень гармоник, чем сигнал мгновенных значений выходных фазных напряжений.
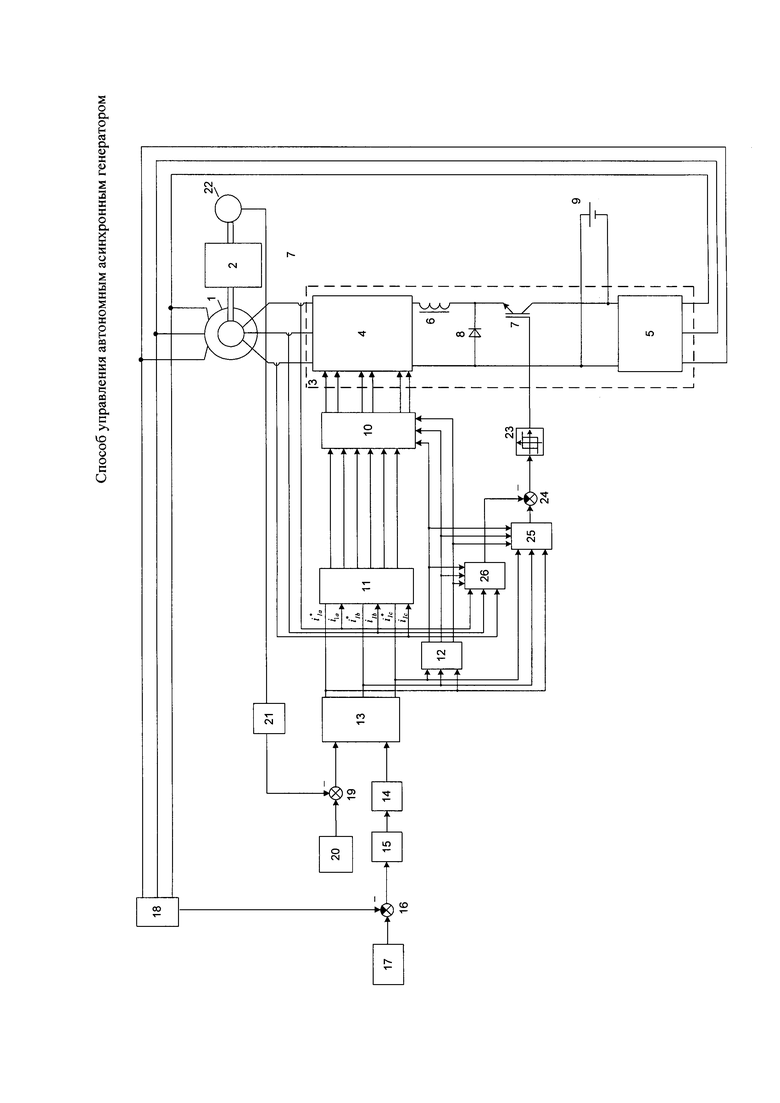
На фигуре приведена функциональная схема управления автономным асинхронным генератором.
Устройство, реализующее предложенный способ, содержит автономный асинхронный генератор с фазным ротором 1, соединенный с источником механической энергии вращения 2, имеющим переменную скорость вращения. В цепь фазного ротора автономного асинхронного генератора 1 включен регулируемый преобразователь 3, содержащий последовательно соединенные по цепи постоянного тока автономный инвертор тока 4, нерегулируемый выпрямитель 5, сглаживающий реактор 6. Между выпрямителем 5 и сглаживающим реактором 6 включают ключевой элемент 7, встречно-параллельно входу инвертора со сглаживающим реактором включен диод 8. Силовой вход регулируемого выпрямителя 5 подключен к выходной цепи автономного асинхронного генератора 1. Для начального запуска автономного асинхронного генератора параллельно выпрямителю включена аккумуляторная батарея 9. Выход блока выбора сигналов 10 соединен с входом автономного инвертора тока 4. Входы блока 10 соединены с выходами трехфазного регулятора тока 11 и блока определения фазы с максимальным значением по модулю 12. Входы блока определения фазы 12 и блока трехфазного регулятора тока 11 соединены с формирователем 13, вырабатывающим сигналы задания мгновенных значений тока на выходе инвертора. Вторые входы трехфазного регулятора тока 11 соединены с фазными выходами инвертора 4. Амплитудный вход формирователя 13 соединен с выходом блока ограничения 14, вход которого соединен с выходом пропорционально-интегрального регулятора напряжения 15, а его вход соединен с выходом узла сравнения 16. Положительный вход узла сравнения 16 соединен с выходом блока задания выходного напряжения генератора 17, отрицательный вход узла сравнения 16 соединен с выходом датчика 18 выходного напряжения генератора 1. Частотный вход формирователя 13 соединен с выходом узла сравнения 19, первый положительный вход которого соединен с выходом блока задания выходной частоты 20, второй отрицательный вход узла сравнения 19 соединен с выходом пропорционального блока 21, вход которого соединен с выходом датчика 22 частоты вращения ротора, установленного на одном валу с генератором 1 и источником механической энергии 2.
Вход ключевого элемента 7 соединен с выходом релейного регулятора 23, вход которого соединен с выходом узла сравнения 24. Положительный вход узла сравнения 24 соединен с выходом блока задания выпрямленного тока преобразователя 25, отрицательный вход узла сравнения 24 соединен с выходом блока расчета эквивалентного выпрямленного тока преобразователя 26. На вход блока задания выпрямленного тока преобразователя 25 поступают сигналы от формирователя 13 и блока определения фазы 12. Вход блока расчета эквивалентного выпрямленного тока преобразователя 26 соединен с блоком определения фазы 12 и с фазными выходами инвертора 4.
Управление автономным асинхронным генератором осуществляется следующим образом. При первоначальном запуске автономный инвертор тока преобразует постоянное напряжение от аккумуляторной батареи в трехфазный ток, подаваемый в ротор автономного асинхронного генератора. Под действием этого тока формируется вращающееся электромагнитное поле в воздушном зазоре автономного асинхронного генератора. В результате этого наводится ЭДС в обмотке статора. При появлении выходного напряжения автономного асинхронного генератора 1 появляется напряжение на выходе нерегулируемого выпрямителя 5, который теперь обеспечивает питание автономного инвертора 4 и подзарядку аккумуляторной батареи 9.
Порядок чередования фаз в роторе выбран таким образом, что электромагнитное поле в воздушном зазоре вращается в сторону направления вращения ротора, при этом частота тока роторной цепи и соответственно частота тока инвертора ω2 будет определяться формулой:

где ω1*- задаваемая частота тока статора; ωр - измеренная частота вращения ротора генератора; pn - число пар полюсов генератора.
Сигнал с выхода сумматора 19 поступает на частотный вход формирователя 13 задания синусоидальных фазных токов. Любое изменение частоты вращения вала генератора сопровождается изменением частоты тока на выходе инвертора в соответствии с формулой (1), в результате частота тока на выходе генератора ω1 поддерживается на заданном уровне.
Блок 17 вырабатывает задание на выходное напряжение генератора 1, которое сравнивается в узле сравнения 16 с измеренным датчиком 18 значением выходного напряжения генератора 1. Сигнал отклонения преобразуется ПИ-регулятором в сигнал задания на амплитуду выходного тока инвертора и поступает на амплитудный вход формирователя 13, который формирует сигнал задания на синусоидальные фазные токи на выходе инвертора 3, сдвинутые относительно друг друга на угол 2π/3.
Эти сигналы задания мгновенных значений фазных токов i2a*, i2b*, i2c* поступают на первые входы релейно-гистерезисных регуляторов тока 11 в виде синусоидального сигнала требуемой амплитуды I* и частоты ω*, на вторые входы регуляторов 11 поступают мгновенные значения фазных токов i2a, i2b, i2c, измеряемые на выходе инвертора 4. В фазных регуляторах 11 на выходах элементов сравнения получаем разницу между заданным и действительным значениями тока в фазах:

затем полученные сигналы поступают на входы блоков гистерезиса, работающих по следующему алгоритму:

где Δ - модуль гистерезиса, задаваемый из условия точности поддержания тока.
Формируемые фазные токи на выходе инвертора 4 имеют два граничных значения - верхнее и нижнее, отличающиеся от заданной синусоиды тока на величину Δ, в пределах которых в любой момент времени должен находиться ток на выходе инвертора 4. Если отклонение между заданным и измеренным сигналами превышает пороговый уровень, релейно-гистерезисных регулятор вырабатывает сигнал, поступающий в инвертор, и осуществляются коммутации соответствующих ключей инвертора, в результате чего происходит уменьшение рассогласования и ток на выходе инвертора входит в допустимую зону отклонения.
При изменении скорости вращения ωp вала источника механической энергии вращения 2, в случае изменения амплитуды и частоты напряжения на выходе автономного асинхронного генератора, появляется рассогласование на входе регулятора напряжения, изменяется сигнал задания на амплитуду тока на выходе инвертора, а также изменяется сигнал задания частоты тока на выходе автономного инвертора 4, определяемый по выражению (1). Эти изменения сигналов задания воздействуют на автономный инвертор тока 4, и отклонения выходного напряжения генератора устраняются за счет изменения частоты и амплитуды тока на выходе автономного инвертора 4.
Блок определения фазы с максимальным значением по модулю 12, который определяет сигналы управления в зависимости от значений фазных токов, работает по следующему алгоритму:
если  и
и  , то
, то 
если  и
и  , то
, то 
если  и
и  , то
, то 
Таким образом, уровень сигнала максимального значения по модулю фазы равен «1» только на определенном выходе блока.
Если мгновенное значение задания тока фазы «A» по модулю больше мгновенных значений задания токов фаз «B» и «C» по модулю, тогда логическая единица появляется на выходе ImaxA, если мгновенное значение задания тока фазы «В» по модулю больше мгновенных значений задания токов фаз «A» и «C» по модулю, тогда логическая единица появляется на выходе ImaxB, если мгновенное значение задания тока фазы «C» по модулю больше мгновенных значений задания токов фаз «A» и «B» по модулю, тогда логическая единица появляется на выходе ImaxC.
Если на блок выбора сигналов 10 поступает сигнал от блока 12 с максимальным значением по модулю тока в фазе ImaxA, ImaxB, ImaxC, то управляющие сигналы, поступающие на ключи инвертора, которые отвечают за ток в этой фазе, генерируются таким образом, чтобы обеспечить заданное направление протекания тока. Сигналы управления остальными ключами проходят через блок 10 без изменения от блока регулятора тока 11.
Нерегулируемый выпрямитель 5 обеспечивает питание инвертора 4 при включенном ключевом элементе 7. При отключенном элементе 7 образуется контур, включающий генератор 1, инвертор 4, катушку индуктивности 6 и диод 8. Ключ 7 регулирует уровень подпитки инвертора.
Величина тока Id выпрямленной цепи регулируется по величине отклонения от уровня сигнала задания Idзад. Релейный регулятор 23 формирует сигналы управления ключом 7 по сигналу рассогласования, поступающего с узла сравнения 24. Сигнал задания выпрямленного тока Idзад определяется блоком задания выпрямленного тока преобразователя 25 на основании сигналов задания мгновенных значений фазных токов инвертора i2a, i2b, i2c, поступающих от формирователя 13, и сигнала управления от блока определения фазы 12. Сигнал Idзад рассчитывается согласно алгоритму:
если  , то
, то 
если  , то
, то 
если  , то
, то 
Таким образом, уровень сигнала Idзад равен максимальному заданию мгновенного фазного тока генератора 1 по модулю одной из фаз формирователя 13. Если мгновенное значение задания тока фазы «A» по модулю больше мгновенных значений задания токов фаз «B» и «C» по модулю, тогда мгновенное задание выпрямленного тока равно мгновенному заданию тока фазы «A», если мгновенное значение задания тока фазы «B» по модулю больше мгновенных значений задания токов фаз «A» и «C» по модулю, тогда мгновенное задание выпрямленного тока равно мгновенному заданию тока фазы «B», если мгновенное значение задания тока фазы «C» по модулю больше мгновенных значений задания токов фаз «A» и «B» по модулю, тогда мгновенное задание выпрямленного тока равно мгновенному заданию тока фазы C.
Блок расчета эквивалентного выпрямленного тока преобразователя 26 работает аналогично блоку задания выпрямленного тока преобразователя 25 и вырабатывает на выходах значения мгновенных фазных токов соответствующей фазы.
В устройстве, реализующем предложенный способ управления автономным асинхронным генератором, с целью лучшей стабилизации напряжения на выходе генератора при изменении нагрузки, снижения мощности инвертора, повышения помехоустойчивости системы управления, формируют мгновенные значения трехфазного тока ротора, регулируют входной ток инвертора, частоту тока ротора определяют как разницу частот вращения поля статора и ротора генератора.
Список литературы
1. Патент РФ №2213409. Способ управления автономным асинхронным генератором. МПК H02P 9/00, 9/48. 27.09.2003. Бюл. №27.
2. Патент РФ №2539347. Способ управления автономным асинхронным двигателем. МПК H02P 9/44, 9/48. 26.07.2013. Бюл. №2.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ АВТОНОМНЫМ АСИНХРОННЫМ ДВИГАТЕЛЕМ | 2013 |
|
RU2539347C1 |
| СПОСОБ УПРАВЛЕНИЯ АВТОНОМНЫМ АСИНХРОННЫМ ГЕНЕРАТОРОМ | 2021 |
|
RU2761868C1 |
| СПОСОБ УПРАВЛЕНИЯ АВТОНОМНЫМ АСИНХРОННЫМ ГЕНЕРАТОРОМ | 2019 |
|
RU2760393C2 |
| Способ управления асинхронным двигателем с фазным ротором | 2022 |
|
RU2786694C1 |
| СПОСОБ УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДОМ ПЕРЕМЕННОГО ТОКА | 2011 |
|
RU2456742C1 |
| СПОСОБ УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДОМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1991 |
|
RU2020724C1 |
| ЧАСТОТНО-РЕГУЛИРУЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2006 |
|
RU2313894C1 |
| СПОСОБ УПРАВЛЕНИЯ АВТОНОМНЫМ АСИНХРОННЫМ ГЕНЕРАТОРОМ | 2001 |
|
RU2213409C2 |
| АСИНХРОННЫЙ ВЕНТИЛЬНЫЙ КАСКАД | 2011 |
|
RU2474951C1 |
| Способ регулирования выходных напряжений автономной системы энергоснабжения с асинхронным вентильным генератором и автономная система энергоснабжения с асинхронным вентильным генератором (ее варианты) | 1981 |
|
SU1066022A1 |
Изобретение относится к области электротехники и может быть использовано для электроснабжения автономных объектов, требующих стабильную сеть переменного тока при переменной скорости вращения вала генератора. Технический результат - улучшение стабилизации напряжения на выходе генератора при изменении нагрузки, повышение помехоустойчивости системы управления. В способе управления автономным асинхронным генератором с вентильным преобразователем в цепи ротора частоту тока ротора изменяют пропорционально сумме частот вращения ротора и поля статора генератора, формируют сигналы задания мгновенных значений синусоидальной трехфазной выходной переменной инвертора, смещенные относительно друг друга на угол 2π/3, определяют отклонение между заданными и измеренными сигналами выходной переменной инвертора, сравнивают отклонение с пороговым уровнем, при превышении добиваются снижения отклонения до значения, меньшего, чем пороговый уровень. Между выпрямителем и сглаживающим реактором включают ключевой элемент, а встречно-параллельно входу инвертора со сглаживающим реактором включают диод и образуют при отключении ключевого элемента цепь прохождения тока, протекающего за счет энергии, накопленной в обмотках двигателя и сглаживающего реактора. Определяют отклонение между заданными и измеренными наибольшими значениями модулей разностей мгновенных значений фазных токов на выходе инвертора, сравнивают отклонение с пороговым уровнем, при превышении которого включают ключевой элемент в цепи постоянного тока, а когда это отклонение не превышает пороговый уровень, отключают ключевой элемент в цепи постоянного тока. Способ управления автономным генератором позволяет улучшить стабилизацию напряжения на выходе генератора при изменении нагрузки, повысить помехоустойчивость. 1 ил.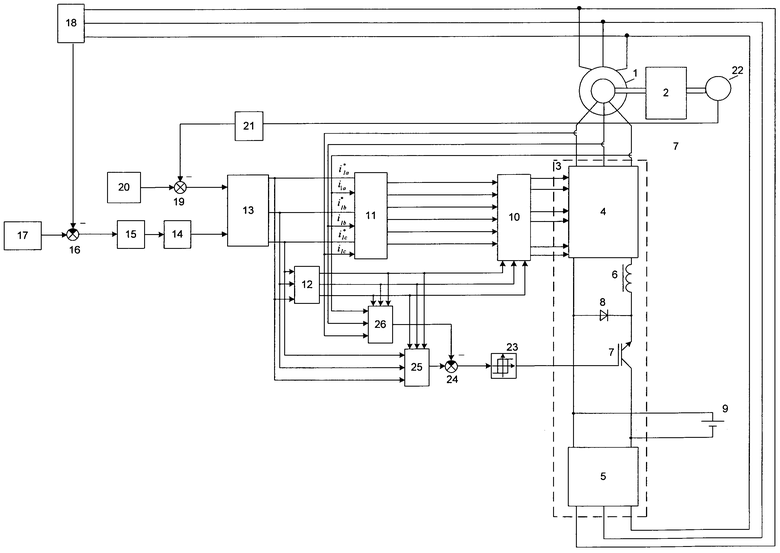
Способ управления автономным асинхронным генератором с вентильным преобразователем в цепи ротора, содержащим выпрямитель и инвертор, соединенные через сглаживающий реактор, заключающийся в воздействии сигналом по отклонению выходного напряжения генератора на вентильный преобразователь и поддержании постоянной частоты выходного напряжения при переменной скорости вращения ротора, причем частота напряжения на выходе преобразователя отличается от частоты выходного напряжения генератора на величину, пропорциональную скорости вращения ротора, в функции сигнала отклонения выходного напряжения генератора формируют сигнал задания мгновенных значений трехфазной синусоидальной выходной переменной инвертора, задают желаемую частоту вращения магнитного поля статора генератора, измеряют частоту вращения ротора генератора, на основе сформированных сигналов задания амплитуды и частоты формируют сигналы задания мгновенных значений синусоидальной трехфазной выходной переменной инвертора, смещенные относительно друг друга на угол 2π/3, подают эти синусоидальные сигналы на первые входы трех фазных релейно-гистерезисных регуляторов выходной переменной инвертора, измеряют сигналы мгновенных фазных значений выходной переменной инвертора, подают эти сигналы на вторые входы фазных релейно-гистерезисных регуляторов выходной переменной инвертора, в каждом релейно-гистерезисном регуляторе определяют отклонение между заданными и измеренными сигналами выходной переменной инвертора, сравнивают отклонение с пороговым уровнем, при превышении которого подают на управляющие входы соответствующих фаз вентильного преобразователя сигналы управления, коммутируют ключевые элементы вентильного преобразователя и добиваются снижения отклонения между заданными и измеренными сигналами выходной переменной инвертора до значения, меньшего, чем пороговый уровень, отличающийся тем, что в качестве трехфазной выходной переменной инвертора используют мгновенные значения фазных токов, вычисляют разность частот вращения магнитного поля статора и частоты вращения ротора генератора, пропорционально которой формируют сигнал задания частоты синусоидального напряжения на выходе вентильного преобразователя, между выпрямителем и сглаживающим реактором включают ключевой элемент, а встречно-параллельно входу инвертора со сглаживающим реактором включают диод и образуют при отключении ключевого элемента цепь прохождения тока, протекающего за счет электромагнитной энергии, накопленной в обмотках двигателя и сглаживающего реактора, среди трех заданных синусоидальных фазных токов на выходе инвертора определяют наибольшее положительное мгновенное значение и наибольшее по модулю отрицательное мгновенное значение и вычисляют сумму модулей этих величин, среди трех измеренных фазных токов на выходе инвертора определяют наибольшее положительное мгновенное значение и наибольшее по модулю отрицательное мгновенное значение и рассчитывают сумму модулей этих величин, определяют отклонение между заданными и измеренными наибольшими значениями модулей разностей мгновенных значений фазных токов на выходе инвертора, сравнивают отклонение с пороговым уровнем, при превышении которого включают ключевой элемент в цепи постоянного тока, а когда это отклонение не превышает пороговый уровень, отключают ключевой элемент в цепи постоянного тока.
| СПОСОБ УПРАВЛЕНИЯ АВТОНОМНЫМ АСИНХРОННЫМ ДВИГАТЕЛЕМ | 2013 |
|
RU2539347C1 |
| СПОСОБ УПРАВЛЕНИЯ АВТОНОМНЫМ АСИНХРОННЫМ ГЕНЕРАТОРОМ | 2001 |
|
RU2213409C2 |
| НОВЫЕ СОЕДИНЕНИЯ, ОБЛАДАЮЩИЕ АНТИБАКТЕРИАЛЬНОЙ АКТИВНОСТЬЮ | 2005 |
|
RU2410386C2 |
| Способ повышения устойчивости трещиноватых пород при проведении горных выработок | 1974 |
|
SU742577A1 |
| US 7830127 B2, 09.11.2010 | |||
| EP 1959554 A1, 20.08.2008 | |||
| W0 2006069569 A1, 06.04.2004. | |||

