1
Изобретение относится к аналоговой вычислительной технике и может быть использовано для построения специализированных вычислителей систем автоматического управления объектами и процессами.
Известны функциональные преобразователи угловых перемещений в электрическое сопротивление, содержащие профилированные проводники с клеммами иликонтактными площадками, Движок и устройство управления съемом сопротивления 1|.
Недостатками механических потенциометров с профилированными каркасами являются: низкая надежность, обусловленная наличием механических контактов у оси движка и в точке соприкосновения движка с каркасом; низкое быстродействие, свойственное для механических устройств; высокая инструментальная погрешность (), вызванная эффектом ступенчатого изменения сопротивления между клеммами потенциометра из-за конечной величины диаметра провода обмотки каркаса и ширины движка.
Наиболее близким техническим решением к предлагаемому изобретению является функциональный преобразователь, содержащий поворотную магнитную систему, в зазоре которой
установлен, активный элемент с контактными площадками и выводами 2J.
Это устройство имеет следующие недостатки: низкое быстродействие, обусловленное необходимостью создания магнитной системы управления, развивающей поле в кристалле полупроводника 0,3-1,5 Тл; высокие погрешности, обусловленные влиянием побочных эффектов (эффекта ХоЛла, Баркгаузена и др.) и температурной зависимостью сопротивления
магниторезистора; невозможность получения функциональных зависимостей и удовлетворительных точностных характеристик без применения дополнительных полупроводниковых элементов и специальных схем.
Целью изобретения является повышение надежности и быстродействия устройства.
Это достигается тем, что в функциональном преобразователе активный элемент выполнен в виде плоского магнитного кристалла с расположенными на его поверхностях на путн образования магнитных.доменов фигурными немагнитными металлическими аппликациями с выводами, активный элемент ориентирован поверхностями перпендикулярно оси вращения поворотной магнитной системы.
Такой функциональный преобразователь лишен недостатков прототипа.
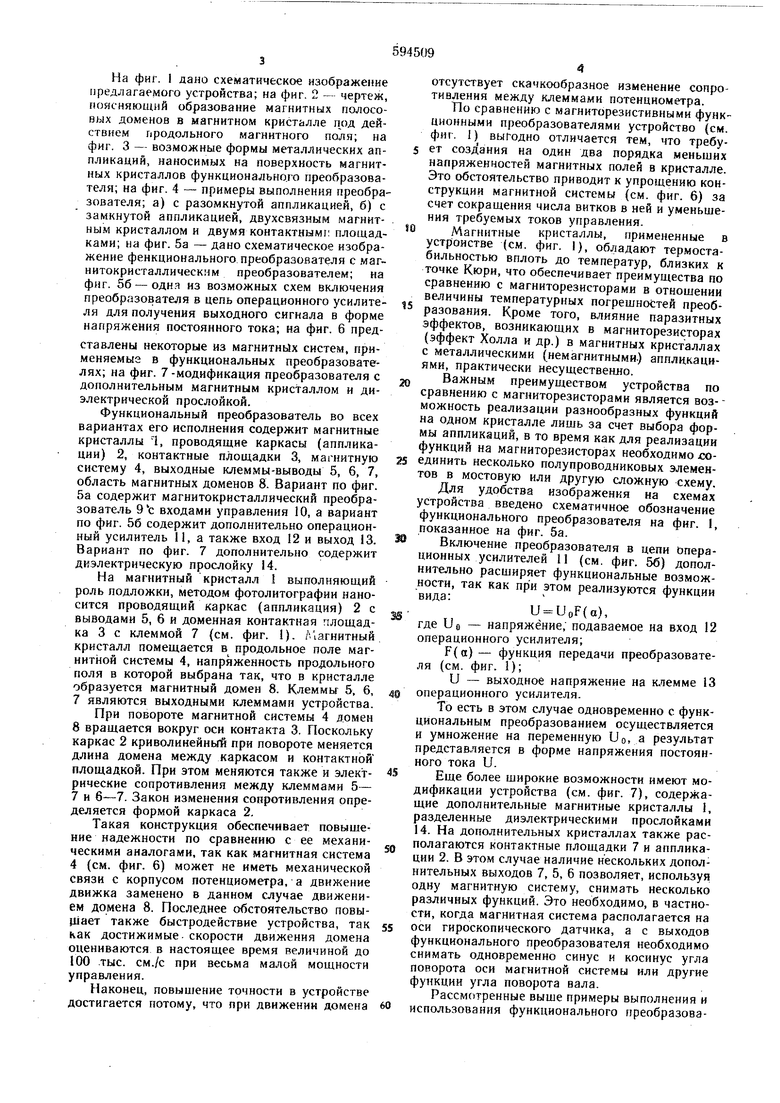
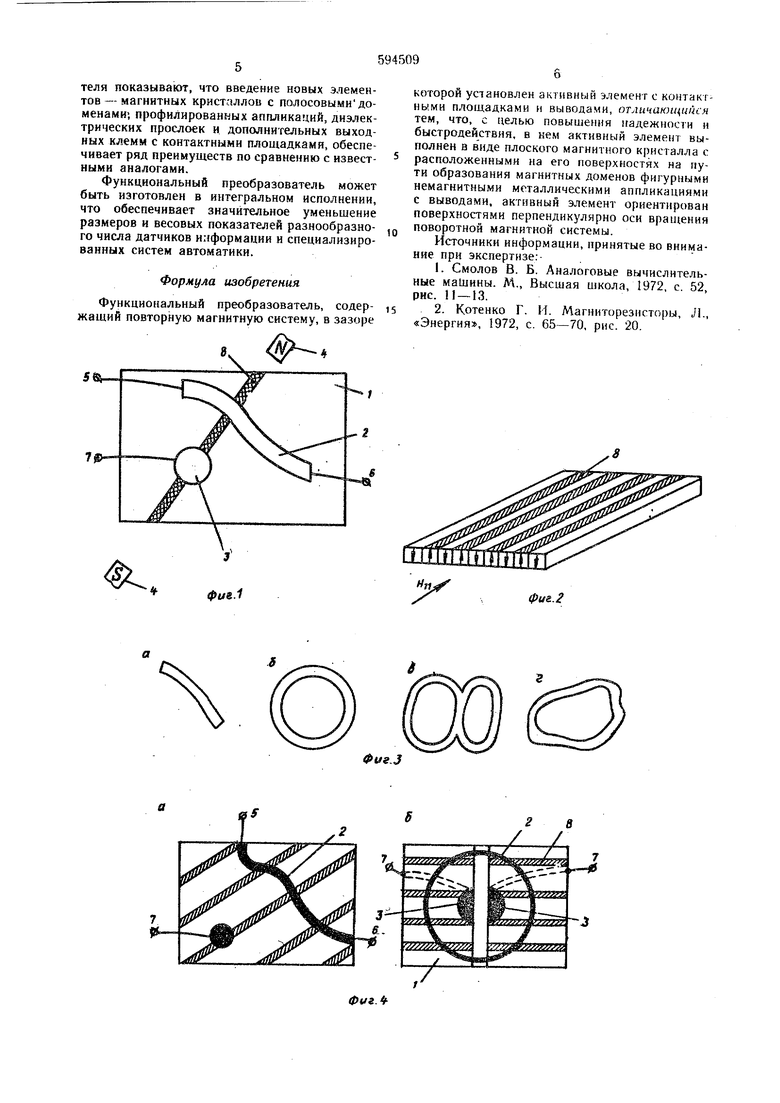
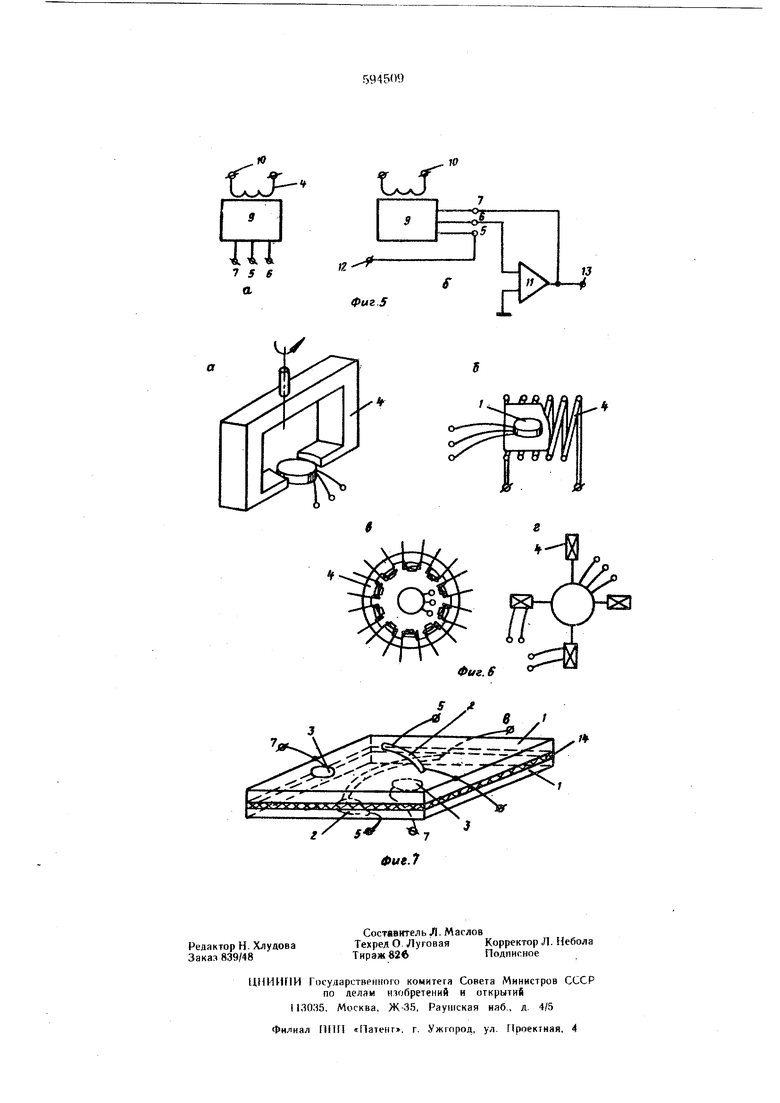
На фиг. 1 дано схематическое изображение предлагаемого устройства; на фиг. 2 - чертеж, поясняющий образование магнитных полосовых доменов в магнитном кристалле под действием продольного магнитного поля; на фиг, 3 - возможные формы металлических аппликаций, наносимых на поверхность магнитных кристаллов функционального преобразователя; на фиг. 4 - примеры выполнения преобразователя; а) с разомкнутой аппликацией, б) с замкнутой аппликацией, двухсвязным магнитным кристаллом и двумя контактным;: площадками; на фиг. 5а - дано схематическое изображение фенкционального преобразователя с магнитокристаллическим преобразователем; на фиг. 56 - одня из возможных схем включения преобразователя в цепь операционного усилителя для получения выходного сигнала в форме напряжения постоянного тока; на фиг. 6 представлены некоторые из магнитных систем, применяемые в функциональных преобразователях; на фиг. 7-модификация преобразователя с дополнительным магнитным кристаллом и диэлектрической прослойкой.
Функциональный преобразователь во всех вариантах его исполнения содержит магнитные кристаллы 1, проводящие каркасы (аппликации) 2, контактные площадки 3, магнитную систему 4, выходные клеммы-выводы 5, 6, 7, область магнитных доменов 8. Вариант по фиг. 5а содержит магнитокристаллический преобразователь 9с входами управления 10, а вариант по фиг. 56 содержит дополнительно операционный усилитель 11, а также вход 12 и выход 13. Вариант по фиг. 7 дополнительно содержит диэлектрическую прослойку 14.
На магнитный кристалл выполняющий роль подложки, методом фотолитографии наносится проводящий каркас (аппликация) 2 с выводами 5, 6 и доменная контактная площадка 3 с клеммой 7 (см. фиг. 1). Магнитный кристалл помещается в продольное поле магнитной системы 4, напряженность продольного поля в которой выбрана так, что в кристалле образуется магнитный домен 8. Клеммы 5, 6,
7являются выходными клеммами устройства.
При повороте магнитной системы 4 домен
8вращается вокруг оси контакта 3. Поскольку каркас 2 криволинейный при повороте меняется длина домена между каркасом и контактной площадкой. При этом меняются также и электрические сопротивления между клеммами 5- 7 н б-7. Закон изменения сопротивления определяется формой каркаса 2.
Такая конструкция обеспечивает повышение надежности по сравнению с ее механическими аналогами, так как магнитная система 4 (см. фиг. 6) может не иметь механической связи с корпусом потенциометра, а движение движка заменено в данном случае движением домена 8. Последнее обстоятельство повышает также быстродействие устройства, так как достижимые скорости движения домена оцениваются в настоящее время величиной до 100 .тыс. см./с при весьма малой мощности управления.
Наконец, повышение точности в устройстве достигается потому, что при движении домена
отсутствует скачкообразное изменение сопротивления между клеммами потенциометра.
Tlo сравнению с магииторезистивными функцнонными преобразователями устройство (см. фиг. 1) выгодно отличается тем, что требу5 ет создания на один два порядка меньших напряженностей магнитных полей в кристалле. Это обстоятельство приводит к упрощению конструкции магнитной системы (см. фиг. 6) за счет сокращения числа витков в ней и уменьшения требуемых токов управления, бМагнитные кристаллы, примененные в
устройстве (см. фиг. 1), обладают термостабильностью вплоть до температур, близких к точке Кюри, что обеспечивает преимущества по сравнению с магниторезисторами в отношении величины температурных погрешностей преобразования. Кроме того, влияние паразитных эффектов, возникающих в магниторезисторах (эффект Холла и др.) в магнитных кристаллах с металлическими (немагнитными.) аппликациями, практически несущественно. 2(j Важным преимуществом устройства по сравнению с магниторезисторами является воз- можность реализации разнообразных функций на одном кристалле лишь за счет выбора формы аппликаций, в то время как для реализации функций на магниторезисторах необходимо со25 единить несколько полупроводниковых элементов в мостовую или другую сложную схему. Для удобства изображения на схемах устройства введено схематичное обозначение функционального преобразователя на фиг. I, показанное на фиг. 5а.
Включение преобразователя в цепи операционных усилителей 11 (см. фиг. 56) дополнительно расширяет функциональные возможности, так как при этом реализуются функции вида: SU UoF(a),
где и о - напряжение; подаваемое на вход 12 операционного усилителя;
F(a)- функция передачи преобразователя (см. фиг. 1);
и - выходное напряжение на к.1емме 13 0 операционного усилителя.
То есть в этом случае одновременно с функциональным преобразованием осуществляется и умножение на переменную Uo, а результат представляется в форме напряжения постоянного тока и.
Еще более широкие возможности имеют модификации устройства (см. фиг. 7), содержащие дополнительные магнитные кристаллы 1, разделенные диэлектрическими прослойками 14. На дополнительных кристаллах также расg полагаются контактные площадки 7 и аппликации 2. В этом случае наличие нескольких дополнительных выходов 7, 5, 6 позволяет, используя одну магнитную систему, снимать несколько различных функций. Это необходимо, в частности, когда магнитная система располагается на 5 оси гироскопического датчика, а с выходов функционального преобразователя необходимо снимать одновременно синус и косинус угла поворота оси магнитной системы или другие функции угла поворота вала.
Рассмотренные выше примеры выполнения и использования функционального преобразователя показывают, что введение новых элементов- магнитных кристаллов с полосовымидоменами; профилированных аппликаций, диэлектрических прослоек н дополнительных выходных клемм с контактными площадками, обеспечивает ряд преимуществ по сравнению с известными аналогами.
Функциональный преобразователь может быть изготовлен в интегральном исполнении, что обеспечивает значительное уменьшение размеров и весовых показателей разнообразного числа датчиков информации и специализированных систем автоматики.
Формула изобретения
Функциональный преобразователь, содержащий повторную магнитную систему, в зазоре
которой установлен активный элемент с контакгными площадками н выводами, отличающийся тем, что, с целью повышения надежности и быстродействия, в нем активный элемент выполнен в виде плоского магнитного кристалла с расположенными на его поверхностях на пути образования магнитных доменов фигурными немагнитными металлическими аппликациями с выводами, активный элемент ориентирован поверхностями перпендикулярно оси вращения поворотной магнитной системы.
Источники информации, принятые во внимание при экспертизе:1.Смолов В. Б. Аналоговые вычислительные машины. М., Высшая щкола, 1972, с. 52, рис. 11 - 13.
2.Котенко Г. И. Магниторезисторы, Л., «Энергия, 1972, с. 65-70, рис. 20.
фиг.2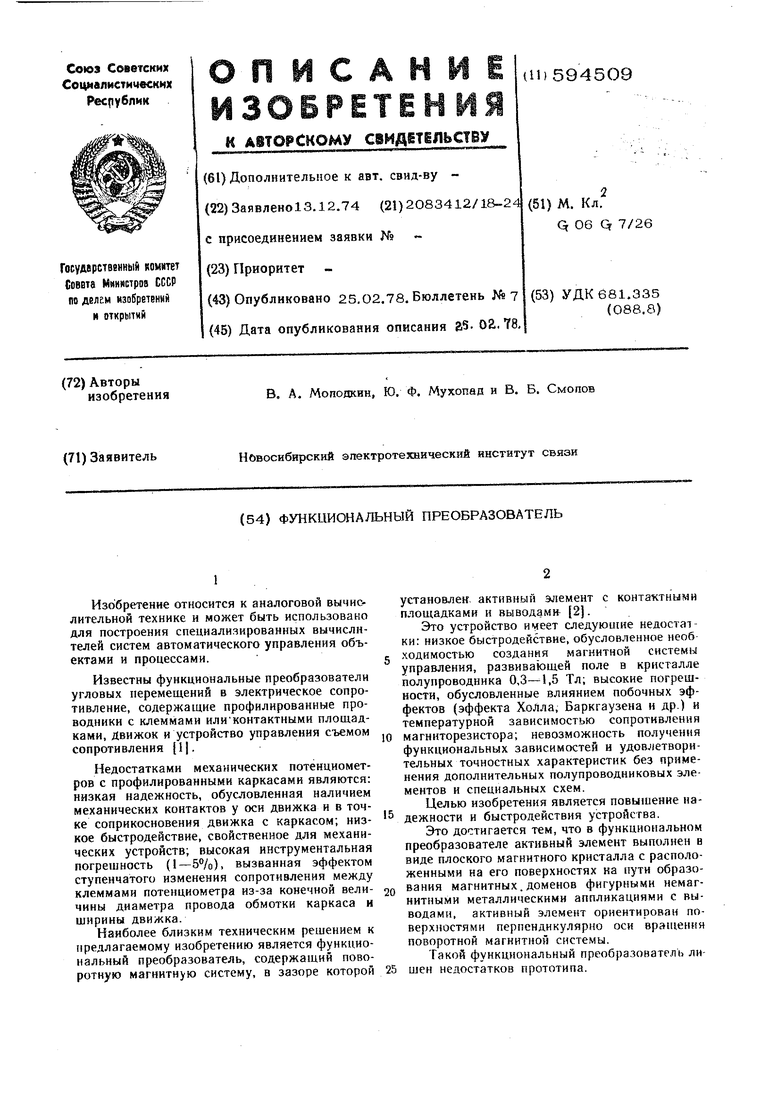
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ИЗМЕРЕНИЯ УГЛА АЗИМУТА ГРУЗОПОДЪЕМНОГО КРАНА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2344370C1 |
| Устройство для защиты преобразователя | 1983 |
|
SU1127038A2 |
| ПРЕОБРАЗОВАТЕЛЬ ЛИНЕЙНЫХ ПЕРЕМЕЩЕНИЙ В КОД | 2009 |
|
RU2400014C1 |
| Запоминающее устройство на магнитных доменах | 1976 |
|
SU640367A1 |
| Регулятор переменного напряжения | 1980 |
|
SU904186A1 |
| МНОГООБОРОТНЫЙ ФУНКЦИОНАЛЬНЫЙ ПОТЕНЦИОМЕТР | 1969 |
|
SU243686A1 |
| Устройство для считывания цилиндрических магнитных доменов | 1986 |
|
SU1325557A1 |
| Магниторезистивный датчик перемещений | 1982 |
|
SU1027657A1 |
| МИКРОЭЛЕКТРОМЕХАНИЧЕСКИЙ ДАТЧИК МИКРОПЕРЕМЕЩЕНИЙ С МАГНИТНЫМ ПОЛЕМ | 2012 |
|
RU2506546C1 |
| МАГНИТОКРИСТАЛЛИЧЕСКИЙ СДВИГОВЫЙ РЕГИСТР | 1973 |
|
SU368650A1 |
Фиг.Э
LJ
10
