Изобретения относятся к подъемно-транспортной технике и могут быть использованы в приборах безопасности грузоподъемных кранов, в частности в системах координатной защиты грузоподъемных кранов.
Известен способ определения угла азимута грузоподъемного крана, называемый потенциометрическим, заключающийся в том, что один или несколько оборотов платформы (стрелы) крана с помощью промежуточных редукторов преобразуют во вращение движка однооборотного линейного потенциометра, перемещение движка потенциометра преобразуют в электрическое напряжение и далее осуществляют аналого-цифровое преобразование этого напряжения (Г. Виглеб. Датчики. Москва, «МИР», 1989 г., Дж. Фрайден. Современные датчики. Справочник. Москва, «ТЕХНОСФЕРА», 2006 г.).
Устройство для осуществления этого способа содержит потенциометр, ось которого закреплена непосредственно или через редуктор на опорно-ходовой части, а корпус - на поворотной части крана, источник постоянного напряжения, подключенный к первому и второму выводам потенциометра, третий вывод которого соединен с входом аналого-цифрового преобразователя (Ограничитель нагрузки крана ОНК-140-13. Новые нормативные материалы по безопасной эксплуатации подъемных сооружений. Вып.2. - М.: Изд-во ПИО ОБТ, 1999, с.47-86).
Недостатком этого способа и устройства для его осуществления является ограниченный диапазон измеряемых углов потенциометром, как правило, 300-330°, поскольку существует разрыв в контактной системе потенциометра в момент перехода его движка с начала на конец обмотки.
Соответственно, в определенном секторе потенциометра (обычно 30-60°) угол азимута (положение поворотной платформы крана) не измеряется.
Кроме того, к недостаткам этого измерителя нужно отнести невысокую надежность, вызванную низкой износоустойчивостью контактной системы потенциометра, необходимость механического контакта с объектом при обеспечении соосности осей вращения потенциометра и поворотной части крана, низкую помехоустойчивость к внешним климатическим факторам.
Известны бесконтактные датчики угла - энкодеры (Г.Виглеб. Датчики. Москва, «МИР», 1989 г., Дж. Фрайден. Современные датчики. Справочник. Москва, «ТЕХНОСФЕРА», 2006 г.). Они лишены недостатков потенциометрических датчиков в части рабочей области. Диапазон рабочих значений углов составляет величину 360°, помимо этого бесконтактные датчики не имеют трущихся контактных частей и их износостойкость составляет миллионы оборотов.
К недостаткам энкодеров можно отнести только необходимость обеспечения соосности между валом энкодера и поворотной частью крана. Для решения этой проблемы приходится ставить редукторы и (или) применять гибкие валы, что приводит к повышению стоимости устройства и появлению люфтов во всех механических передаточных звеньях.
Известен способ измерения угла азимута грузоподъемного крана по патенту Российской Федерации №2206869 от 29.03.2002 г.
Этот способ заключается в создании искусственного магнитного поля, неподвижного относительно опорно-ходовой части грузоподъемного крана. Указанное поле воздействует на два магниточувствительных элемента, расположенных на поворотной платформе крана и сдвинутых относительно друг друга на четверть оборота. В результате формируют два электрических напряжения пропорционально синусу и косинусу угла между направлением искусственного магнитного поля и углом поворота платформы крана. Определяют полярности этих напряжений и на основании этих полярностей судят о квадранте угла азимута, а также определяют абсолютные значения этих напряжений и по их величинам судят о значении угла азимута в пределах каждого квадранта.
В том же патенте описано устройство для измерения угла азимута грузоподъемного крана, наиболее близкое к предлагаемому. Это известное устройство содержит два магниточувствительных элемента, закрепленных на поворотной платформе крана со сдвигом на четверть оборота, входы которых подключены к источнику питания, а выходы подключены к входам измерительной схемы. На опорно-ходовой части крана закреплен источник магнитного поля, который выполнен в виде постоянного магнита и имеет размеры, значительно превышающие размеры магниточувствительных элементов. Такое техническое решение не содержит трущихся и несоосных частей.
Недостатком этого способа и устройства является необходимость монтажа постоянного магнита и двух разнесенных в пространстве по дуге на четверть оборота (2πR/4) магниточувствительных элементов на поворотной части крана.
Наиболее близким к предлагаемому изобретению, относящемуся к способу измерения угла азимута грузоподъемного крана, является способ по патенту Российской Федерации №2268233 от 25.11.2002 г.
Этот способ заключается в том, что на поворотной части крана размещают два чувствительных элемента, которые сдвинуты относительно друг друга на четверть оборота, воздействуют на чувствительные элементы с возможностью получения двух электрических напряжений, выявляют амплитуду и полярность этих напряжений, на основании которых вычисляют значение величины угла азимута. На неповоротной части крана дополнительно размещают два чувствительных элемента, сдвинутых относительно друг друга на четверть оборота, которые обеспечивают формирование двух дополнительных электрических напряжений. При этом все чувствительные элементы выполняют магниточувствительными и воздействуют на них магнитным полем Земли. Затем путем обработки дополнительных электрических напряжений определяют угол между неповоротной частью крана и магнитным полем Земли, а действительное значение угла азимута определяют как разность угловых положений неповоротной и поворотной частей крана относительно магнитного поля Земли.
В известном устройстве, реализующем этот способ, содержатся два чувствительных элемента, закрепленных на поворотной части крана со сдвигом на четверть оборота, входы которых подключены к источнику питания, а выходы подключены к входам измерительной схемы, на неповоротной части крана размещены два дополнительных чувствительных элемента, сдвинутых также со смещением на четверть оборота, входы которых подключены к источнику питания, а выходы подключены к дополнительным входам измерительной схемы, при этом все чувствительные элементы выполнены магниточувствительными с возможностью измерения магнитного поля Земли.
Недостатком изобретения является наличие четырех чувствительных элементов (двух основных и двух дополнительных).
Техническим результатом предлагаемого изобретения является упрощение конструкции и повышение технологичности устройства за счет сокращения количества монтажных частей.
Для получения такого технического результата в предлагаемом способе измерения угла азимута грузоподъемного крана, заключающемся в том, что с выходов двух магниточувствительных датчиков, установленных на поворотной части крана в зоне действия внешнего магнитного поля, снимают электрическое напряжение, причем с выхода одного датчика - пропорциональное синусу угла поворота крана относительно силовых линий магнитного поля, а с выхода другого датчика - пропорциональное косинусу этого угла, определяют полярности напряжений и их величины, по этим значениям определяют угол азимута, в качестве внешнего магнитного поля используют магнитное поле Земли, а в качестве датчиков используют магниторезистивные мосты, внутренние магниточувствительные структуры которых ориентированы только по одной оси, причем оси этих датчиков ортогональны и расположены в горизонтальной плоскости. Перед каждым снятием показаний датчиков их внутренние магниточувствительные структуры устанавливают по легкой оси поочередно в противоположных направлениях управляющими импульсами тока.
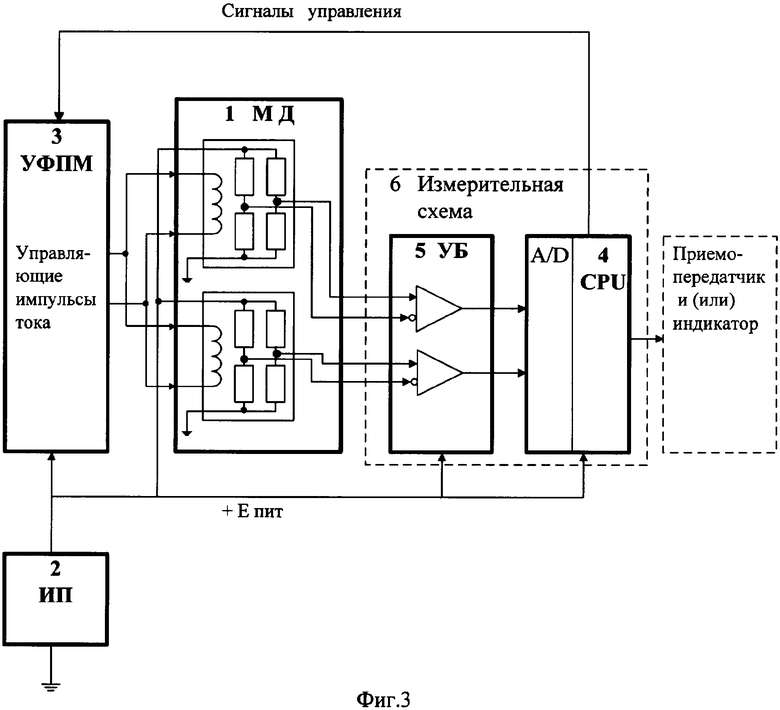
Для достижения названного технического результата предлагается устройство для измерения угла азимута грузоподъемного крана, содержащее два закрепленных на поворотной части крана и подключенных к источнику питания магниточувствительных датчика, размещенных в одном корпусе, выходы которых соединены с соответствующими входами измерительной схемы угла азимута, выход которой соединен с выходом устройства. Датчики выполнены в виде чувствительных к магнитному полю Земли магниторезистивных мостов, магниточувствительные структуры которых ориентированы только по одной оси, причем оси этих датчиков ортогональны и расположены в горизонтальной плоскости.
В отличие от известного в предлагаемое устройство введен узел формирования периодической последовательности двуполярных управляющих импульсов тока, выход которого соединен с управляющими входами датчиков. Эти кратковременные импульсы непрерывно устанавливают и переустанавливают внутренние магниточувствительные структуры датчиков по легкой оси в противоположных направлениях. Формированием импульсов управляет измерительная схема, снабженная управляющим выходом, соединенным со входом введенного узла. При этом измерительная схема обеспечивает съем показаний датчиков в промежутках времени между соседними управляющими импульсами тока.
Решение может достигаться также тем, что измерительная схема содержит усилительный блок и микроконтроллер, причем входы измерительной схемы подключены к соответствующим входам усилительного блока, выходы которого подключены к соответствующим входам аналого-цифрового преобразователя микроконтроллера, выходы микроконтроллера подключены к соответствующим выходам измерительной схемы.
В предлагаемом изобретении сокращается количество монтажных частей также за счет того, что магниточувствительные датчики располагаются в одном корпусе.
Предлагаемые изобретения иллюстрируются чертежами и диаграммами (фиг.1, 2, 3).
Фиг.1 иллюстрирует определение азимута стрелы крана по горизонтальным составляющим проекции вектора магнитного поля.
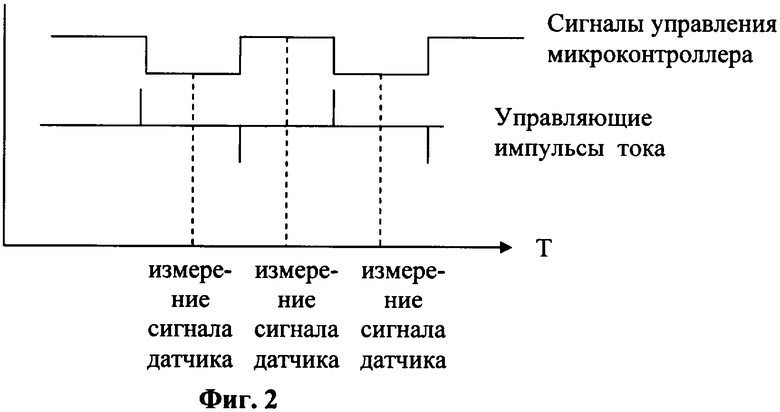
На фиг.2 изображена временная диаграмма работы устройства.
На фиг.3 представлена блок-схема устройства.
Для осуществления способа измерения угла азимута грузоподъемного крана необходимо определиться с направлением силовых линий внешнего магнитного поля. Силовые линии магнитного поля земли начинаются на Южном магнитном полюсе и заканчиваются на Северном. Силовые линии магнитного поля Земли перпендикулярны поверхности Земли на магнитных полюсах и параллельны на экваторе. Для определения угла азимута необходимы только две горизонтальные составляющие проекции вектора магнитного поля на горизонтальную плоскость Нх и Ну, вертикальная составляющая не рассматривается. Каждый датчик измеряет один из компонентов горизонтального поля - по оси Х и по оси Y.
Нх=Н sin α
Ну=Н cos α
Если принять направление стрелы крана за ось Х (фиг.1), тогда угол α между осью Х и направлением на северный магнитный полюс определяется как арктангенс отношения составляющих Ну к Нх
α=arctg(Hy/Hx)=arctg (sin α/cos α)
В качестве магниточувствительных датчиков используют два магниторезистивных моста, управляемых узлом формирования периодической последовательности двуполярных управляющих импульсов тока.
Во время работы микропроцессор формирует управляющие импульсы (фиг.2), которые при помощи этого узла формирования импульсов тока преобразуются в узкие (1-2 мкс) импульсы тока амплитудой 4-5А, ориентирующие домены магниторезисторов вдоль оси предпочтительного намагничивания так называемой «легкой оси».
После окончания действия импульса тока домены магниторезисторов под воздействием вектора магнитного поля Земли занимают положение, отличное от исходного, тем самым, изменяя сопротивление магниторезистора и величину тока, протекающего через магниторезистивный мост. После окончания действия импульса тока проводится измерение и запоминание напряжения с выхода моста Y (Uвых1), после чего на узел формирования импульсов тока поступает следующий импульс управления с выхода микроконтроллера. Узел формирования импульсов формирует второй узкий импульс тока, направление которого противоположно первому. В результате этого домены магниторезисторов ориентируются вдоль легкой оси, но в противоположном направлении. Повторно проводятся измерение и запоминание напряжения с выхода моста Y (Uвых2) и затем производятся вычисления по формуле
UY=(Uвых1-Uвых2)/2
Это позволяет избавиться от погрешностей, связанных с начальным смещением моста, температурным дрейфом самого моста и связанной с ним измерительной схемы. Таким образом, получаем значение напряжения, пропорционального синусу угла проекции вектора магнитного поля на ось Y.
Аналогичным образом вычисляется значение напряжения, пропорционального косинусу угла проекции вектора магнитного поля на ось X.
В идеальном случае выходные сигналы при повороте на 360° представляют собой синусоидальную волну одинаковой величины, причем фаза одного выходного сигнала отличается от фазы другого на 90°, т.к. внутренние магниточувствительные структуры датчиков ориентированы только по одной оси, оси этих датчиков ортогональны и расположены в горизонтальной плоскости.
Уравнение окружности с центром в условной системе координат выражается следующей формулой:
Н2=Нх 2+Ну 2=Н2cos2α+H2sin2α
В реальной обстановке металлические конструкции крана вносят свои искажения, окружность превращается в эллипс со смещенным центром. Для устранения искажений необходимо ввести поправочные коэффициенты. Для их вычисления производится не менее одного полного оборота крана вокруг своей оси, значения выходных сигналов датчиков накапливаются в микропроцессоре и вычисляются поправочные коэффициенты. После одного вычисления значения поправочных коэффициентов сохраняются в памяти микроконтроллера и используются для коррекции последующих измерений.
Затем выбирают реперную точку на строительной площадке, присваивают ей начальное значение 0 градусов и отсчет угла поворота крана ведут уже от этой точки.
Реализация способа измерения угла азимута в виде предложенного устройства позволяет получать данные об угле поворота в 360°, не имеет каких-либо контактных или несоосных элементов, устройство выполнено в едином конструктиве.
Устройство для измерения угла азимута содержит магниточувствительные датчики 1 (фиг.3), жестко закрепленные на поворотной платформе (стреле) крана в горизонтальной плоскости. Входы магниторезистивных мостов этих датчиков соединены с источником питания 2, управляющие входы датчиков через узел 3 формирования периодической последовательности двуполярных управляющих импульсов тока соединены с микроконтроллером 4, а выходы датчиков соответственно соединены через усилительный блок 5 с входами измерительной схемы 6, выполненной в виде микроконтроллера со встроенным многоканальным преобразователем аналог-код. Выход измерительной схемы соединен с выходом устройства.
Микроконтроллер 4 со встроенным аналого-цифровым преобразователем может быть любого типа, например АТ89Сххх, AT90Sxxx, ATmega xxx, PIC16C 71-74, 68НС08хх - 68НС708хх и др.
В качестве магниточувствительных датчиков 1 могут быть использованы магниторезисторные микросхемы серии НМС с двумя магниторезистивными мостами, расположенными ортогонально друг к другу (ось Х и ось Y), например НМС 1002, НМС 1022, НМС 1052 (фирмы Honeywell).
В качестве узла 3 формирования периодической последовательности двуполярных управляющих импульсов тока может быть использован, например, ключ на полевых транзисторах IRF 7105 или аналогичный.
В качестве усилителя 5 может быть использован любой дифференциальный усилитель, например К 143 5 УД2 или LM324, имеющий низкий коэффициент шума.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ИЗМЕРЕНИЯ УГЛА АЗИМУТА ГРУЗОПОДЪЕМНОГО КРАНА (ВАРИАНТЫ) И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2002 |
|
RU2268233C2 |
| СПОСОБ ИЗМЕРЕНИЯ УГЛА АЗИМУТА ГРУЗОПОДЪЕМНОГО КРАНА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2002 |
|
RU2206869C2 |
| ОГРАНИЧИТЕЛЬ ГРУЗОПОДЪЕМНОСТИ СТРЕЛОВОГО КРАНА | 1992 |
|
RU2045468C1 |
| СПОСОБ КАЛИБРОВКИ И УСТРОЙСТВО ИЗМЕРЕНИЯ УГЛА НА ОСНОВЕ МОСТОВОГО МАГНИТОЧУВСТВИТЕЛЬНОГО ДАТЧИКА | 2015 |
|
RU2589755C1 |
| СПОСОБ КОНТРОЛЯ ПОЛОЖЕНИЯ РЕЛЬСОВОГО КРАНА НА КРАНОВОМ ПУТИ | 2005 |
|
RU2281241C2 |
| СПОСОБ И УСТРОЙСТВО АВТОМАТИЧЕСКОЙ КООРДИНАТНОЙ ЗАЩИТЫ БАШЕННОГО КРАНА ПРИ РАБОТЕ В СТЕСНЁННЫХ УСЛОВИЯХ | 2002 |
|
RU2246441C2 |
| Цифровой измеритель тока | 2016 |
|
RU2666582C2 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ МАГНИТНОГО ПОЛЯ СКЕЛЕТНЫХ МЫШЦ ПРИ ОПРЕДЕЛЕНИИ МЫШЕЧНОЙ АКТИВНОСТИ | 2016 |
|
RU2646747C2 |
| СПОСОБ ЗАЩИТЫ СТРЕЛОВОГО ГРУЗОПОДЪЕМНОГО КРАНА ОТ ПЕРЕГРУЗКИ (ВАРИАНТЫ) | 2006 |
|
RU2322382C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ УГЛОВОГО ПЕРЕМЕЩЕНИЯ КОНСТРУКТИВНЫХ ЭЛЕМЕНТОВ | 2005 |
|
RU2300736C1 |
Изобретение относится к измерительной технике и может быть использовано в приборах безопасности грузоподъемных кранов. Сущность: с выходов двух установленных на поворотной части крана датчиков, чувствительных к магнитному полю Земли, снимают электрическое напряжение. В качестве датчиков используют магниторезистивные мосты, магниточувствительные структуры которых ориентированы только по одной оси. Оси датчиков ортогональны и расположены в горизонтальной плоскости. С выхода одного датчика получают напряжение, пропорциональное синусу угла поворота крана относительно силовых линий магнитного поля, а с выхода другого датчика - пропорциональное косинусу этого угла. Перед каждым снятием показаний датчиков домены их внутренних магниточувствительных структур ориентируют по легкой оси поочередно в противоположных направлениях управляющими импульсами тока. Измерительная схема обеспечивает съем показаний датчиков в промежутках времени между соседними управляющими импульсами тока. Затем определяют полярности напряжений, их величины и рассчитывают угол азимута. Технический результат: упрощение конструкции и повышение технологичности. 2 н. и 1 з.п. ф-лы, 3 ил.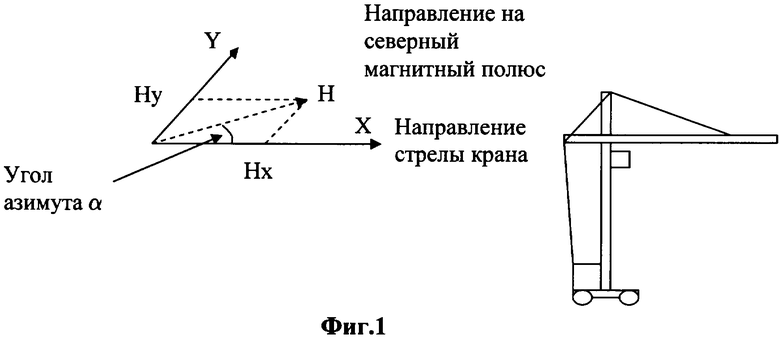
| СПОСОБ ИЗМЕРЕНИЯ УГЛА АЗИМУТА ГРУЗОПОДЪЕМНОГО КРАНА (ВАРИАНТЫ) И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2002 |
|
RU2268233C2 |
| СПОСОБ ИЗМЕРЕНИЯ УГЛА АЗИМУТА ГРУЗОПОДЪЕМНОГО КРАНА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2002 |
|
RU2206869C2 |
| Указатель положения стрелы поворотного крана | 1985 |
|
SU1379239A1 |
| DE 4409153 A1 21.09.1995. | |||

