Цель изобретения - сниженую нагрузки на элементы механизма перемещения и повышение тем самым его долговечности. Это достигается тем, что механизм перемещения каретки, содержащий .цилиндры пойачи, соединённые штоками с кареткой, и дозатор в виде винтовой пары и дозирукядего ш«линдра с плунжером, связанным с гайкой винтовой пары, снабжен разгрузочными, расположенными параллельна винту цилиндрами, плунжеры которых прикреплены к фланцу плунжера дозирующего цилиндра, а также дополнительными плунжерными иилнндрами с полыми плунжерами и пропущенными через них тягами, связывающими плунжеры и клетку, причем полости дополнительных Ш1линдров соединены с полостью йоаируккцего цилиндра Jepea дистанционно увравляемьгй клапан и аккумулятор.
Применение системы разгрузки плунжера дозирующего цилиндра позволяет резко снизить нагрузку на винт винтовой пары дозатора и уменьшить габариагы последнего Введение дополнительных плунжерных цилиндров, св51занных с разгрузочными цилиндрами через аккумулятор, обеспечивает уменьшение объема жидкости в гидравлической системе дозатора (что снижает по, грешность стабильности подачи за счет увеличения плотности жидкости), а также использование масла в качестве рабочей жидкости гидросистемы дозатора.
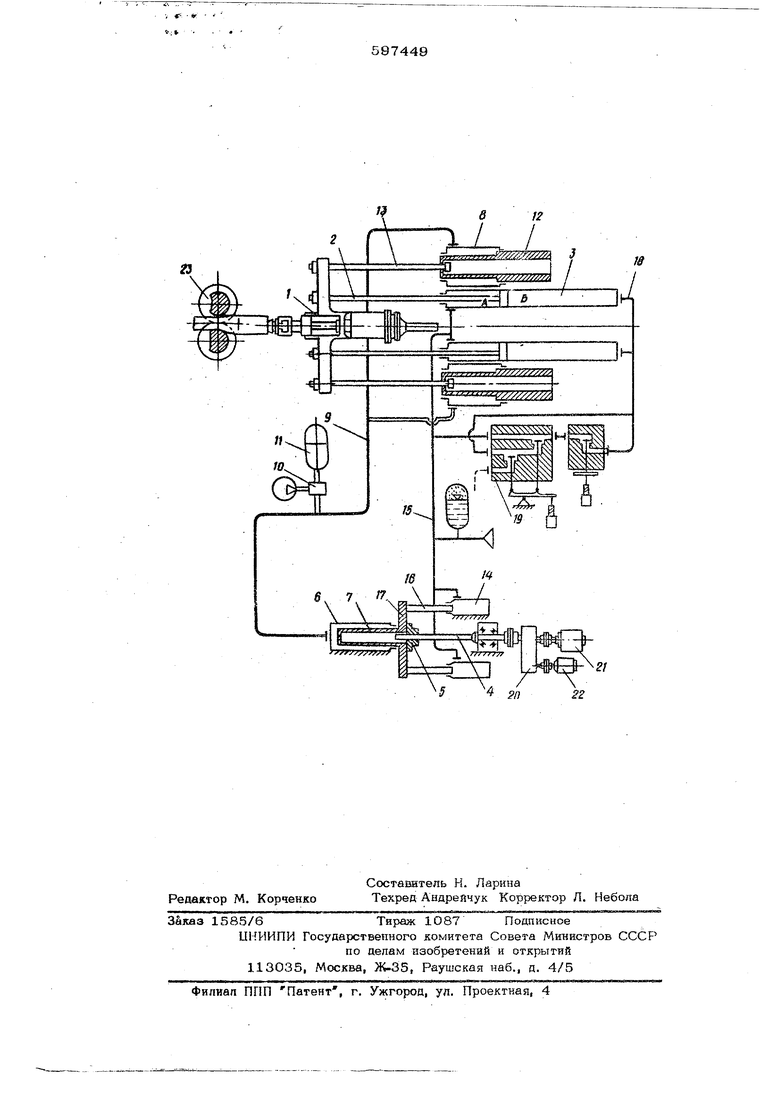
На чертеже показана схема предлагаемого механизма перемещения каретки.
Механизм перемещения каретки подающего аппарата пилигримового стана содержит соединенные с кареткой I через штоки 2 цилиндры 3 подачи двустороннего .действия и гидромеханический дозатор. Дозатор выполнен в виде винтовой пары с винтом 4 и гайкой 5, .дозиругошего цилиндра 6 с плунжером 7, связанным с гайкой 5 винтовой пары, и дополнительных плунжерных цнлиндров 8, полости которых соединены с полостью дозирующего цилиндра трубопроводом 9 через дистанционно управляемый клапан 10 и аккумулятор 11 Дополнительные цилиндры имеют полые ступенчатые плунжеры 12, через которые пропущены тяги 13, связывающие плунжеры с кареткой 1,
Механизм перемещения каретки снабжен разгрузочными, расположенными параллельно вииту цилиндрами 14, полости которых соединены с гидравлической общецеховой магистралью напрямую трубопроводом 16, а плунжеры 16 цилиндров прикреп-
лены к фланцу 17 плунжера 7 дозирующего цилиндра.
Цилиндры 3 подачи своими штоковыми полостями А связаны через трубопровод 15 с общецеховой магистралью. Поршневые полости Б этих цилиндров соединены между собой трубопроводом 18, связанным с главным дистрибутором 19, имеющим клапаны наполнения и сливные каналы. Винт 4 дозатора имеет регулируемый привод вращения через редуктор 20 с муфтой переключения от электродвигателя 21 |быстрого хода и электродвигателя 22 рабочего хода.
; Механизм перемещения каретки подающего аппарата работает следующим образом.
В исходном положении каретка 1 и связанные с ней щтоки 2 и тяги 13 находятся в крайнем правом положении. Ступенчатые полые плунжеры 12 дополнительных цилиндров также находятся в крайнек; правом положении, при этом ограничители их хода отрегулированы из расчета возможности прокатки гильз максимальной длины в данной партии. Плунжер 7 дозирующего цилиндра 6 находится в крайнем правом положении, разгрузочные цилиндры 14. подключены к напорной общецеховой магистрали напрямую и передают усилие на фланец 17 плунжера 7 дозирующего цилиндра. Клапаны главного дистрибутора 19, а также клапан 1О затфыты.
Для быстрого перемещения каретки 1 к валкам 23 рабочей клети открывают большой клапан главного дистрибутора 19. Одновременно благодаря блокировке открывается клапан IQ и включается электродвигатель 21 быстрого хода винта 4 в направлении перемещения плунжера 7 дозирующего цилиндра в исходное положение. При этом гидравлика из общецеховой магистрали по трубопроводу 18. через большой клапан главного дистрибутора 19 заполняет поршневую полость Б цилиндров 3 двустороннего действия. Их порщни со штоками 2 совместно с кареткой 1 и тягами 13 быстро перемещаются вперед к рабочей клети. Гидравлика из штоковых полостей А цилиндров 3 вытесняется обратно в сеть.
Винт 4 дозатора быстро перемещает 7 дозирующего цилиндра 6 в исходное положение, вытесняя при этом жидкость из дозирукицего цилиндра в аУскумулятор 11 через клапан 1О. После соприкосновения головок тяг 13 с внутренними передними торцовыми поверхностями ступенчатых полых плунжеров 12 начинается совместное перемещение каретки со ступенчатыми полыми плунжерами 12; при этом жидкость вытесняется из допЬлнительных цилиндров 8 в аккумулятор 11 через клпан 1О.
В момент рабочей подачи каретки открывают малый клапан главного дистрибутора 19, причём благодаря блокировке клапан 1О закрывается, электродвигатель 21 быстрого хода винта 4 отключается, а электродвигатель 22 рабочего хода винта начинает работать с заранее установленной скоростью. Жидкость из общецеховой магистрали по трубопроводу 18 через главный дистрибутор 19 поступает в поршнерые полости Б пигапшров 3 подачи двустороннего действия. Их поршни со штоками, с кареткой 1, тягами 13 я плунжерми 12 цилиндров 8 будут перемещаться вперед к валкам рабочей клети, вытесняя при этом жидкость из штоковых полостей А цнлнндров 3 подачи обратно в сеть, а из полостей дополнительных иилиндров 3 в полость дозирующего цилиндра 6. Величина перемещения каретки за один оборот определяется скоростью перемещения плунжера 7 дозирующего цилиндра 6.
При рабочей подаче усилие со стороны разгрузочных цилшшров 14 направлено против действия давления жидкости, вытесняемой из цилиндров 8, и тем самым разгружает винт 4. После осуществления рабочей подачи каретки производят ее перемещение в исходное положение путем включения электродвигателя 21 быстрого хода Евгата, который, вращаясь, перемещает плунжер 7 дозирующего цилиндра в исходное положение.
Одновременно жидкость из аккумулятогра 11 через клапан 10 вытесняется в полости цилиндров 8, плунжеры которых пе- ремеишются в исходное положение. Усгляя со стороны разгрузочнь оилшщров 14 направлены по направлению перемещения плунжера 7 дозирующего оилнндра.
Предлагаемый механизм благодаря использованию в нем автономного гидромеханического дозатора позволяет умег.ыиать объем жидкости в его гидросистеме,, что приводит к снижению хода плунжера дозируюшего цилиндра и повышению тем самым точности подачи, а также повышению долговечности вследствие применения системы разгрузки плунжера дозирующего цилиндра.
Формула изобретения
Механизм перемещения каретки подающего аппарата пильгерстана, содержащий цилиндры подачк, соединенные штоками с кареткой, и дозатор в виде винтовой пары и дозирующего цилиндра с плунжером, связанным с гайкой винтовой пары, отличающийся тем, что, с целью снижения нагрузки на элементы механизма и повь}шения тем самым егй долговечности, он снабжен разгрузочными, расположенными параллельно винту цилиндрами, плунжеры которых прикреплены к фланцу плунжера дозирующего цилиндра, а также дополнительными плунжерными цилиндрами с полыми плунжерами и пропущенными через них тягами, связывающими плунжеры и каретку, причем попости дополнительных цил шдров соединены с полостью дозирующего цилиндра через дистанционно уйравяявмый клапан и аккумулятор. Источники информации, принятые во внимание при экспертизе:
1.Кожевников С. Н. и др. Оборудование цехов с пнлнгргтмовымн трубопрокатными установками. М,, Мёталлурги дат, 1974, с. 178.
2.Авторское свидотельство СССР № 446328. кл. В 21 В 21/04, 1973.
в12
-XJL /
ftr
2i
22
| название | год | авторы | номер документа |
|---|---|---|---|
| Механизм перемещения каретки по дающего аппарата пилигримового стана | 1973 |
|
SU446328A1 |
| Устройство для перемещения каретки подающего аппарата пилигримового стана | 1978 |
|
SU743734A1 |
| ГИДРАВЛИЧЕСКИЙ ПРЕСС | 2010 |
|
RU2461462C2 |
| ДВИГАТЕЛЬ ВНУТРЕННЕГО СГОРАНИЯ ИЗМЕНЯЕМОЙ ТАКТНОСТИ | 1994 |
|
RU2090767C1 |
| СПОСОБ ФОРМИРОВАНИЯ РАЗРЫВНОГО ЗАРЯДА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2446378C1 |
| Плунжерный агрегат | 2017 |
|
RU2654560C1 |
| ГИДРАВЛИЧЕСКИЙ ПРЕСС | 2013 |
|
RU2521757C1 |
| УСТАНОВКА НАСОСНАЯ ПЛУНЖЕРНАЯ ПОГРУЖНАЯ И ЕЕ ЛИНЕЙНЫЙ ЭЛЕКТРОДВИГАТЕЛЬ | 2009 |
|
RU2422676C2 |
| УСТРОЙСТВО ДЛЯ РЕКУПЕРАЦИИ КИНЕТИЧЕСКОЙ ЭНЕРГИИ ТОРМОЖЕНИЯ ДВИЖУЩЕГОСЯ ТРАНСПОРТНОГО СРЕДСТВА | 2006 |
|
RU2355591C2 |
| УСТРОЙСТВО ДЛЯ СНАРЯЖЕНИЯ АРТИЛЛЕРИЙСКИХ БОЕПРИПАСОВ | 2016 |
|
RU2651712C2 |