1
Изобретение относится к измерительной технике и может быть использовано для сигнализации положения объектов, движущихгся с ускорением, в устройствах автоматики и телемеханики и других подобных устройствах.
Иэвестнь бесконтактные сигнализаторы пспоженин, которые содержат магнитные системы, ИСТОЧНИКИ питания, пороговые элементы и магниточувствительные эпементы, ориентированные так, что при воздействии ,пш магниточувствительный элемент ПОЛЯмагнитнсй системы на выходе элемента формируется сигнал, несущий информацию о положении движущегося объек .
Недостатком этих устройств является большая погрешность.
Наиболее близким , техническим решением к предлагаемому изобретению является бесконтактньй сигнализатор пологжения, содержащий магнитную головку с зазором, укрепленную на подвижном объекте, гальваномагнитный датчик, укрепленный на неподвижном об7эекте5 источник питания постоянного
тока и пороговый элемент, вход которого подключен к выходу датчика 2.
Недостатком известного сигнализатора, является зависимость динамически погрешности момента сигнализации от скорости и ускорения движущегося объекта, причем погрешнсють особенно велика при малых скоростях движущегося объекта.
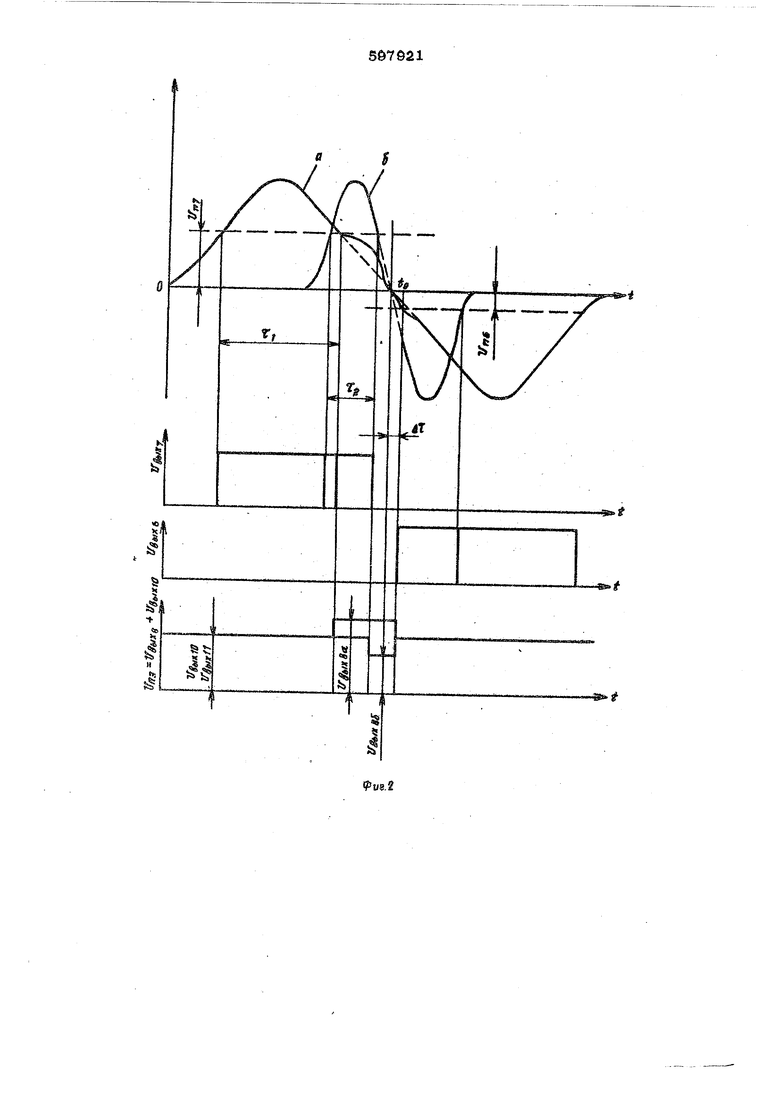
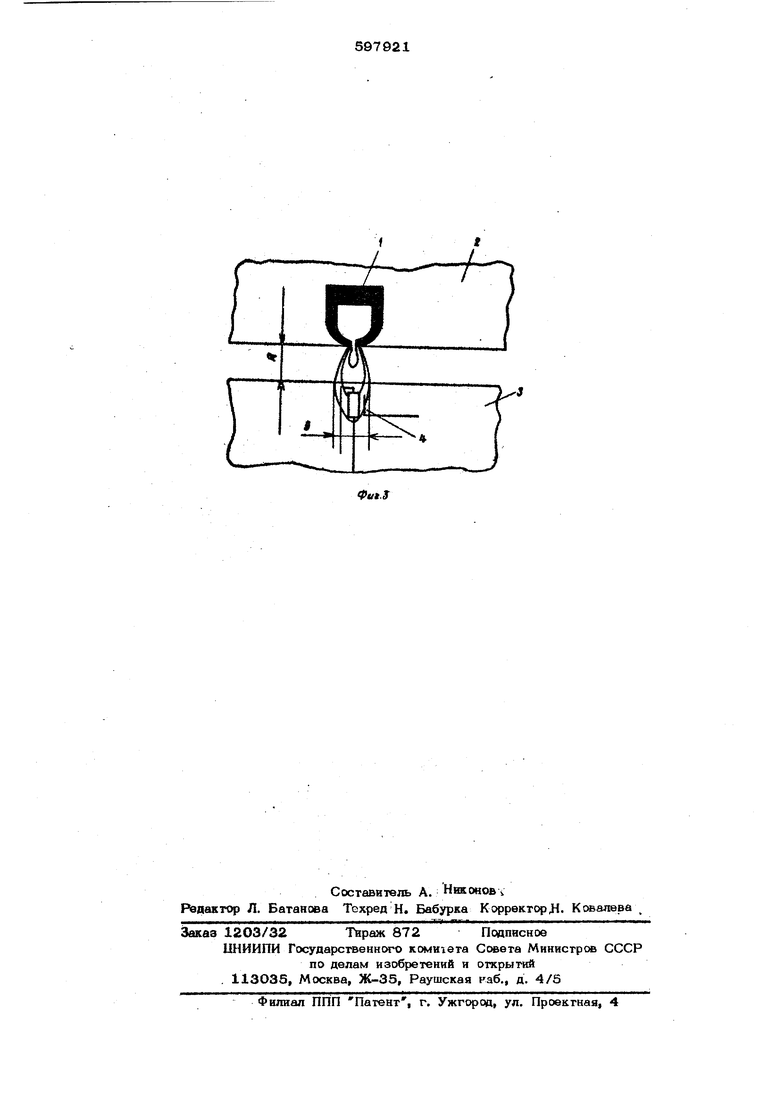
и,пя уменьшения динамической погрешности предлагаемый сигнализатор снабжен вторым пороговым элементом, првобраэова телем время-напряжение, коммутатором и источником постоянного нйпряжения, гальваномагнитный датчик выполнен в виде гальваномагниторекомбинационного транзистора,, входы пороговых элементов подключены к выходу датчика, выход первого порогового элемента подключен к входу сбрасывания прес разователй ;время-напряжение и к первому упраалйкшему входу коммутатора к является выходом сзигналиаатора, выход второго порогоЕОГо элемент-в подключен к вхэду преобразователя вре;ч5Я-напряжение и ко второму управляющему входу комг тутатора. Шзхход ксточника постоянного напряжения подключен к входу коммутатора и выход преобразователя время-напряже ние подкгаочены к управлшошему электроду датчика. На фаг, 1 представлена (|огнкционап ная схема бесконтактного сигнализатора положения; на фиг. 2 - временные диаграммы сигналов на выходах соответств ющих блоков; на фиг. 3 - ориентация галь ваномагниторекомбинадионного (ПГМР) транзистора в поле магнитной системы. Устройство содержит магнитную головк 1 с зазором, укрепленную на объекте 2, который передвигается относительно неподвижного объекта 3. На неподвижном объекте 3 расположен гальваномагнитный . датчик 4, например ranbeaHOMarHHTOpeKOMбинационный (ПГМР) транзистор, который ориентирован так, что.плоскость его полевого электрода тпараллельная плоскости Bdзора магнитной головки 1. ПГМР транзистор 4 соединен с источником 5 питания постоянного тока. К точке соединения ПГМ транзистора и источника 5 питания подклю чены пороговые элементы б и 7. Выход порогового элемента 7 соединен с преобразователем 8 время-напряжение, выход которого соединен с полевым электродом ПГМР транзистора. Выход порогового элемента 6 соединен со входом сбрасыван преобразователя 8 и с выходным зажимом 9 бесконтактного сигнализатора положения. К выходному- зажиму устройства подсоединен первый управляющий вход коммутатора 10, второй управляющий вход которого соединен с выходом порогового эле мента 7. Вход коммутатора 1О соединен с источником 11 постоянного напряжения, а выход соединен с полевым электродом .ПГМР -транзистора. Бесконтактный сигнализатор положения работает следующим образом. При движении объекта: 2 относительно объекта 3 и прохождении магнитной головки 1 с зазором, над ПГМР .транзистором на выходе последнего получается сигнал, диаграмма которого показана на фиг. 2. На полевой электрод ПГМР транзистора через коммутатор 10 подается с выхода источника постоянного Напряжения смещени Ufj3 U-Bt,iif,() V скорости V| движения объекта 2 сигнал имеет форму а , при большей скорости i V форму. S . При постоянной величине зазора R между объектами 2 и 3 (фиг. 3) максимальное -значение напряжения сигнала на выходе ПГМР транзистора зависит только от его магннточувствительности. При этом ширина импульса напряжения на выходе аорогового устройства 7 является обратно пропорциональней скорости движения объекта 2. В исходном состоянии на noneBoiS 9лекгрод1, ПГМР транзистора через коммутатор 1О подано постоянное напряжение смешения от ис, точника 11. Оно обуславливает постоянную , магниточувствительность ПГМР транзистора. При наличии сигнала на выходе ПГМР транзистора срабатывает пороговый элемент 7. Длительность выходного импульса порогового элемента обратно пропорциональна скорости движения объекта 2. .;В,преобразователе 8 время-напряжение этот импульс преобразуется в постоянное напряжение, величина которого обратно пропорциональна скорости движения объекта 2. Послеокончания выходного импульса порогового элемента 7 коммутатор 10 отключает источник постоянного напряжения от полевого электрода ПГМР транзисторами на него подается выходное напряжение преобразователя времянапряжение, Магниточувствительность ПГМР транзистора увеличивается или уменьшается в зависимости от скорости движения объекта 2. Выходнсй импульс порогового элемента 6 поступает на выходной зажим сигнализатора положения и на коммутатор 1О для подачи начального смешенияU j jj на полевой электрод ПГМР транзистора, а также на преобразователь 8 время-напряжение для разрядки последнего. Использование ПГМР.. транзистора в предлагаемом устройстве обеспечивает исключение динамической погрешности в относительном диапазоне скоростей объекта 2 не менееУА Ц( , Формула изобретения Бесконтактный сигнализатор положения, одержащий .магнитную головку с зазором, гальваномагнитный датчик, источник питания постоянного тока и пороговый элемент, вход оторого подключен к выходу датчика, о т . ич-ающийся тем, что, с целью гленыивнкя динамической погрешности,, он набжен вторым прроговым элементом, пре«. образователем время.-напряжение, коммутатором и источником .постоянного напряжения, альваномагнитный датчик выполнен в виде олевого гальваномагниторекомбинационного ранзистора, входы пороговых элементов одключены к выходу датчика, выход перого порогового элементаподключен к ходу сбрасывания преобразователя врея1-напряже-1{е и к первому управляющему ходу коммутатора и является выходом игнализатора, выход второго порогового лемента подключен к входу преобразоватея время-напряжение и ко второму управляюему входу коммутатора, выход источника
постоянного напряжения подключен к входу коммутатора, а выход коммутатора и выход преобразователя время-напряжение подклю чены к управл пощему электроду датчика.
Источники информации, принятые во вн мание при аксп ггиэе:
1. Хомерики О. К. Применение гальваноК агнитных датчиков в устройствах автоматики и измерений. М., 1971. Энергия, с. 31-98.
2.Приборы и системы управления. М. 19 1972, № 7, с. 13-15.

| название | год | авторы | номер документа |
|---|---|---|---|
| Бесконтактный коммутирующий узел | 1977 |
|
SU669349A1 |
| Устройство для измерения магнит-НОгО пОля | 1979 |
|
SU822091A1 |
| Бесконтактный сигнализатор положения | 1979 |
|
SU846997A1 |
| Способ измерения постоянного магнитного поля | 1978 |
|
SU789934A1 |
| Устройство для измерения перемещений | 1988 |
|
SU1548660A1 |
| Устройство для измерения тока | 1980 |
|
SU898331A1 |
| Способ измерения постоянного магнитногопОля | 1979 |
|
SU838620A1 |
| Твердотельный преобразователь магнитных полей | 1980 |
|
SU894623A1 |
| ИНТЕГРАЛЬНЫЙ ГРАДИЕНТНЫЙ МАГНИТОТРАНЗИСТОРНЫЙ ДАТЧИК | 2010 |
|
RU2453947C2 |
| Матричный преобразователь магнитных полей | 1980 |
|
SU907483A1 |