(54) БЕСКОНТАКТНЬт СИГНАЛИЗАТОР ПОЛОЖЕНИЯ
| название | год | авторы | номер документа |
|---|---|---|---|
| Бесконтактный сигнализатор положения | 1976 |
|
SU597921A1 |
| Бесконтактный сигнализатор положения | 1988 |
|
SU1551970A1 |
| Бесконтактный сигнализатор положения | 1989 |
|
SU1693360A1 |
| Устройство для определения положения объекта | 1983 |
|
SU1290374A1 |
| ПОПЛАВКОВЫЙ ИЗМЕРИТЕЛЬ УРОВНЯ ЖИДКОСТИ | 2018 |
|
RU2683139C1 |
| Датчик тока | 1990 |
|
SU1725139A1 |
| ИНДУКТИВНЫЙ БЕСКОНТАКТНЫЙ ПЕРЕКЛЮЧАТЕЛЬ | 2002 |
|
RU2223567C2 |
| УСТРОЙСТВО ДЛЯ РЕГИСТРАЦИИ И КОНТРОЛЯ ПАРАМЕТРОВ ДВИЖЕНИЯ ТРАНСПОРТНЫХ СРЕДСТВ | 1995 |
|
RU2099787C1 |
| Универсальный бесконтактный измерительный преобразователь тока | 1990 |
|
SU1739307A1 |
| Путевой датчик | 1987 |
|
SU1519943A1 |
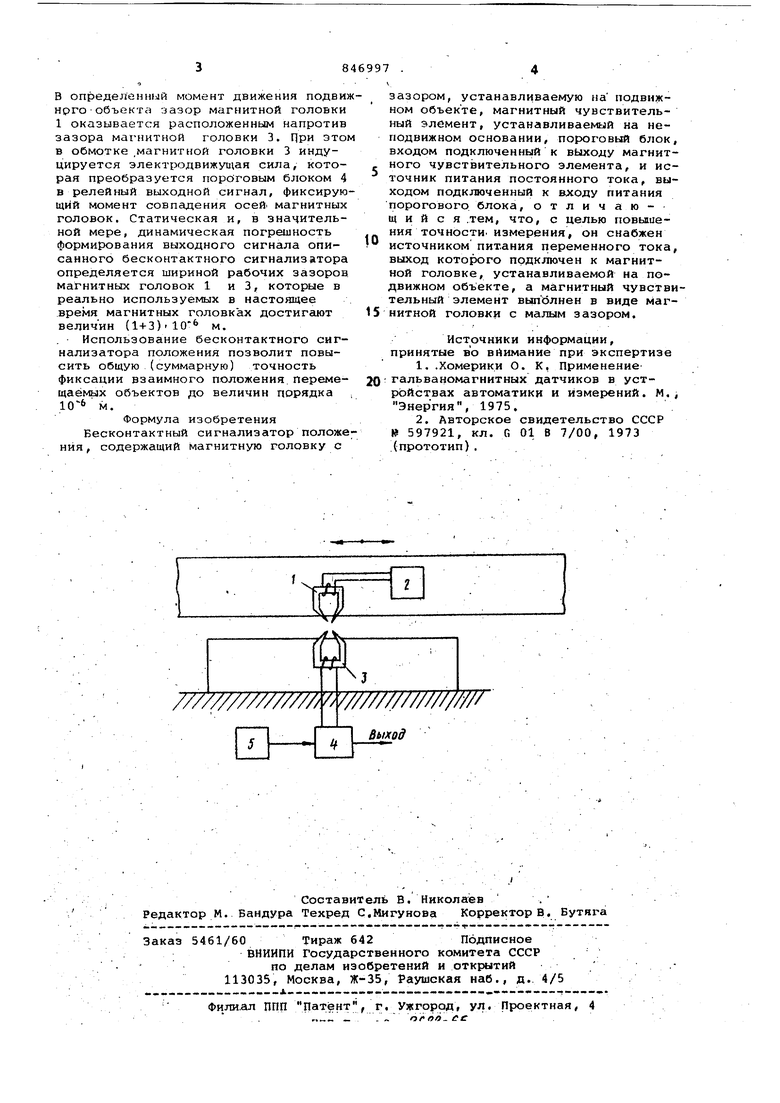
: . t . . . 1 Изобретение относится к измерител ной технике и может быть использован для сигнализации Положения движущихся объектов в устройствах автоматики и телемеханики. Известен бесконтактный сигнализатор положения, который содержит магнитную систему, расположенную на подвижном объекте, исчочннк питания, пороговый элемент гальваномагнитный чувствительны элемент 1 1 . Недостатком данного устройства является большая статическая и динамическая погрешность. Наиболее близким техническим решением к предлагаемому является бесконтактный сигнализатор положения, содержащий магнитную головку с зазорюм, устанавливаемую на подвижном объекте, магнитный чувствительный эл мент, устанавливаемый на неподвижном основании, пороговый блок входо подключенный к выходу магнитного : чувствительного элемента, и источни питания постоянного тока, выходом подключенный к входу питания порогового блока Г23. Однако этот сигнализатор характеризуется недостаточно высокой точностью измерейия. Цель изобретения - повыленке точности измерения. Поставленная цель достигается тем, что сигнализатор снабжен источником питания переменного ока, выход I OTOрого подключен к магнитной головке, устанавлиэаемой на подвижном объекте, а магнитный чувствительный элемент выполнен в виде магнитной головки с малым зазором. На чертеже представлена блок-схема бесконтактного сигнализатора положения. Сигнги)изатор содержит магнитную Золовку 1, расположенную на подвижном объекте, источник 2 питания переменного тока, выход которого подключен к магнитнойголовке 1, магнит-, ную головку 3 с Мсшым зазором, pacrtoложенную на неподвижном основании, пороговый блок 4, вход которого подключен к выходу магнитной головки 3, и источник 5 питания постоянного тока, подключенный к пороговому блоку 4. Сигнализатор работает следующим образом. Магнитная головка 1, питаемая переменным током от источника 2 питаний, создает вокруг своего рабочего зазора переменное электромагнитное поле.
В определенный момент движения подвижнрго-объекта зазор магнитной головки 1 оказывается расположенным напротив зазора магнитной головки 3. При этом в обмотке .магнитной головки 3 индуцируется электродвижущая сила, которая преобразуется пороговым блоком 4 в релейный выходной сигнал, фиксирующий Момент совпадения осей магнитных головок. Статическая и, в значительной мере, динамическая погрешность формирования выходного сигнала описанного бесконтактного сигнализатора определяется шириной рабочих зазоров магнитных головок 1 и 3, которые в реально используемых в настоящее время магнитных головках достиггиот величин (1+3)10 м.
Использование бесконтактного сигнализатора положения позволит повысить общую (суммарную) точность фиксации взаимного положения Перемещаемых объектов fio величин порядка м.
Формула изобретения Бесконтактный сигнализатор положения , содержащий Магнитную головку с
///////////7///// //
У//////////////////
зазором, устанавливаемую на подвижном объекте, магнитный чувствительный элемент, устанавливаемый на неподвижном основании, пороговьой блок, входом подключенный к выходу магнитного чувствительного элемента, и источник питания постоянного тока, выходом подключенный к входу питания порогового блока, отличающийся .тем, что, с целью повышения точности, измерения, он снабжен источником питания переменного тока, выход которого подключен к магнитной головке, устанавливаемой на подвижном объекте, а магнитный чувствительный элемент вьщблнен в виде магнитной головки с малым зазором.
Источники информации, принятые во вйимание при экспертизе
Выход
