1
Изобретение относится к области медицинской техники и предназначено для проведения испытаний исполнительных механизмов протезор, с электроприводами.
Известно устройство для испытания исполнительных механизмов протезов с электроприводами, содержащее блоки паузы, реверса и счетчик циклов i.
Однако известное устройство не позволяет имитировать реальные условия эксплуатации и получать достоверные результаты при испытании на надежность исполнительных механизмов.
Цель изобретения - имитация реальных условий эксплуатации исполнительных механизмов и получение достоверных результатов при испытании на надежность и долговечность.
Для этого устройство имеет блок управления, реле времени и координирующие ячейки но числу испытываемых механизмов, причем блок управления соединен с блоками паузы, peFiCpca и координирующими ячейками, а блок паузь с реле времени .и счетчиком циклов.
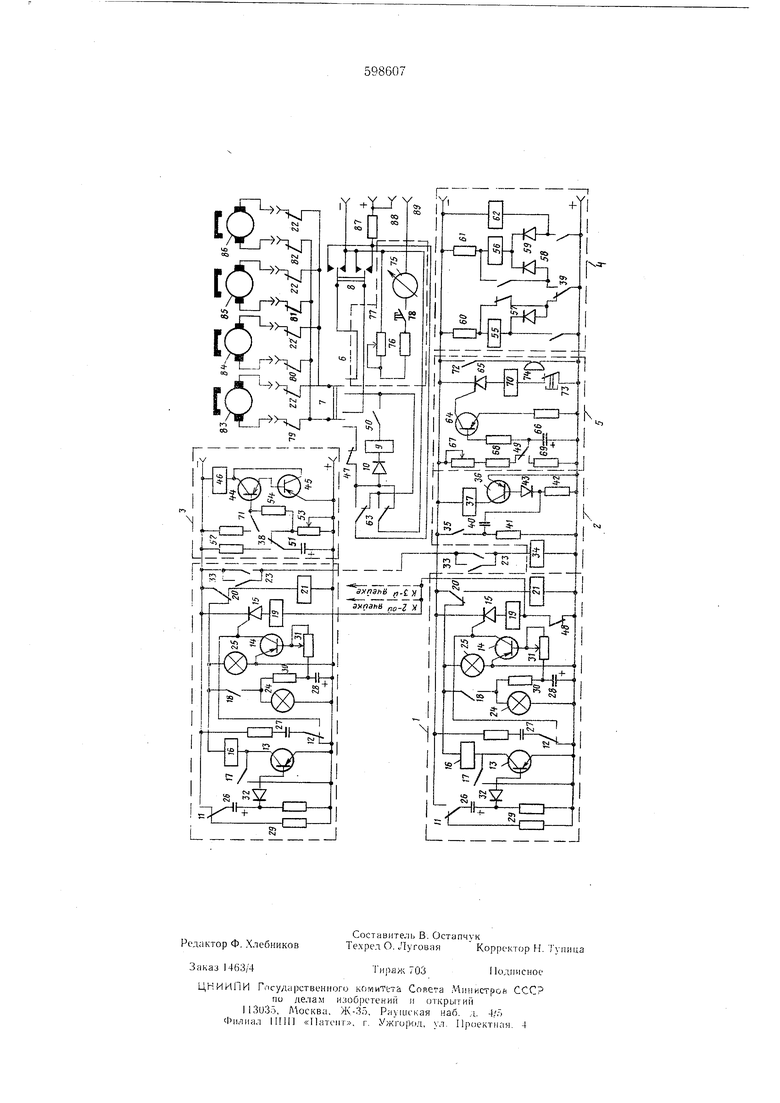
На чертеже изображена принципиальная схема предлагаемого устройства.
Оно содержит координирующие ячейки 1 (по числу испытуемых объектов), блок 2 управления блоком 3 паузы и блоком 4 реверса.
ячейку 5 слежения, калибровочный блок 6, систему ручного управления, выполненную в виде переключателя 7, при помощи которого выбирается ид управ.чения испытуемыми объектами (ручной или автоматический), и трехпозиционного ключа 8 с фиксированным нейтральным положением. Для отсчета циклов работы испытуемых объектов устройство содержит электромагнитный счетчик циклов и полупроводниковый диод 10.
Каждая координирующая ячейка содержит микропереключатели 1 1 и 12, имеющие по одной группе контактов на переключение, транзисторы 13 и 14, тиристор 15, электромагнитное реле 16 с контактами 17 и 18, электромагнитное реле 19 с контактами 20, электромагнитное реле 21 с контактами 22 и 23, контрольные лампы 24 и 25, конденсаторы 26-28, резисторы 29-31, диод 32 и тумблер 33.
Блок 2 включает в себя электромагнитное реле 34 с контактами 35, транзистор 36 и реле 37 с контактами 38 и 39, конденсатор 40, резисторы 41, 42 и диод 43.
Блок 3 в основном состоит из транзисторов 44 и 45, электромагнитного реле 46 с контактами 47-50 конденсатора 51 и резисторов 52-54.
Блок 4 представляет собой триггер, собранный на ЭоПектромагнитных реле 55 и 56, диодах 57-59 и резисторах 60 и 61. Блок имеет выходное реле 62 с двумя группами Контактов 63 на переключение.
Ячейка 5 слежения в основном содержит транзистор 64, тиристор 65, конденсатор 66, переменный резистор 67, резисторы 68 и 69, электромагнитное реле 70 с контактами 71 и 72, кнопку 73 с нормально замкнутыми контактами и зуммер 74
Калибровочный блок 6 имеет амперметр 75, калибровочный резистор 76, переменный резистор 77 и кнопку 78 с нормально разомкнутыми контактами.
Выключатели 79-82 служат для отключения от цепи питания двигателей 83-86 приводов любого из испытываемых объектов.
В обшей цепи питания электродвигателей приводом испытываемых объектов установлен резистор 87, служащий для обеспечения возможности наблюдения на экране, подключаемого к нему через гнезда 88 и 89 электронного осциллографу, формы кривой тока, протекающего через обмотку двигателя привода одко () из испытуе.мых объектов, с це.;1ью onpezteления времени движения звеньев привода и величины тока при работе последнего.
Устройство работает следующим образом (рас.:мотрим случай испытания искусственных кистей с электроприводом). Перед включением установки следует убедиться в том, что переключатель 7 находится в среднем положении, тумблеры 33 - разомкнутом, а выключатели 79-82 - в замкнутом положениях. В момент включения питания устройства зажигаются контрольные 25, сигнализируюшие о том, что установка готова к работе. После включения в сеть источника питания испытываемых объектов переключатель 7 переводят в положение, соответствуюшее автоматическому управ.лению работой испытуемых объектов. UejiH питания объектов скоммутироваиы так, что при первом вк.аючении пальцы всех испытываемых кистей начинают движение в сторону их смыкания. При полном сгибании пальцев последние, нажимая на рычаг микропереключателя 11, вызывают его срабатывание. При этом отрицательный полюс конденсатора 26 присоединяется к отрицательному полюсу источника питания, и конденсатор заряжается. Часть зар ядного тока конденсатора, поступая через диод 32 на базу транзистора 13, отпирает его на некоторое время. При соответствующем подборе номиналов элементов в схеме этого времени оказывается достаточно для кратковременного срабатывания реле 16. Контакты 7 этого реле, замыкаясь, обеспечивают подачу напряжения на обмотку электромагнитного реле 16 помимо транзистора 13 и обеспечивают блокировку этого реле после прекращения тока заряда конденсатора 26, а через вторую пару контактов 18 этогб реле подаетсяняпряжение на контро.тьную лампу 24 и конденсатор 28. Контрольная лампа 24 загорается, сшпализируя о том, что пальцы кисти
выполнили движение на схват. Конденсатор 28 заряжается через резистор 30 и потенциал его верхнего по схеме полюса через переменный резистор 31 подводится к базе транзистора 14. По мере заряда конденсатор;. 28 растет ко.Ьлекторный ток тр; нзистора 14 и как только его величина достигнет значения тока спрямления тиристора 15 последний открывается, вызывая срабатывание реле 19. Время от .момента нажатия пальцев кисти на рычаг
0 микропереключателя 11 до момента срабатывания реле 19 является временем выдержки двигателя привода кисти под током после выполнения движения на схват. Оно является необходи.мым компонентом программы испытаний, приближающим их условия к реальным условиям эксплуатации кисти и может регулироваться при помощи переменного резистора 31. При срабатывании реле 19 его контакты 20, переключаясь, размыкают цепь питания элементов координирующей ячейки и включают питание на обмотку реле 21. При этом лампы 24 и 25 гаснут, сигнализируя о том, что данная кисть выполняла движение на схват в соответствии с программой испытаний. Одновременно обесточивается реле 16, его контакты 17 и 18 возвраплаются в исходное положение, подготавливая ячейку к следующему плклу работы. Реле 21 своими нормально замкнутыми контактами 22 разрывают цепь питания одного из двигателей 83-86 привода кисти, а нормально разомкнуты.ми контактами 23 за. мыкает участок цепи питания реле 34 ячейки управления блоком 3 паузы и блоком 4 реверса.
После того, так подобны.м образом отработают последний объект испытаний и последняя кординирующая ячейка, будет замкнут последний участок в цепи питания реле 34. Это реле срабатывает и через свои нормально разомкнутые контакты 35 подключит конденсатор 40 к источнику питания (на чертеже не показан).
0 Блок управления блоком 3 паузы и блоком 4 реверса работает аналогично первой ступени координирующей ячейки, включающей в себя конденсатор 26, диод 32, транзистор 13 и реле 16. Поэтому замыкание контактов 35 ре, jT- 34 вызовет кратковременное срабатывание реле 37. Оно имеет две группы ко1ггактов 38 и 39 на переключение. Первая из них управляет работой блока 3 паузы, а вторая - блоком реверса. В момент срабатывания реле 37 его контакты 38 подключают конденсатор 51
через резистор 52 к источнику питания, и этот конденсатор заряжается. В мо.мент отпускания 37 конденсатор 51 подключается через резистор 54 к базе составного транзистора 44- 45 и разряжается через этот составной транзистор и резистор 53. В момент подключения конденсатора 51 к базе транзистора 44 срабатывает реле 46 блока 3 паузы. Отпускание реле 46 произойдет после того, как конденсатор 51 разрядится до такой степени, что коллекторный ток составного транзистора станет
меньше тока отпускания реле. Время удержаНИИ реле (время паузы) можно регулировать при помощи переменного резистора 53.
При срабатывании реле 46 его нормально замкнутые контакты 47 разрывают общую цепь питания двигателей 83-86 приводов испытываемых объектов на время паузы, обеспечивая некоторый «отдых последних. Одновременно нормально замкнутые контакты 48 этого реле разрывают общую цепь питания реле 19 и транзисторов 15 всех координирующих ячеек, вследствие чего обесточивается реле 19, 21 и 34. На элементы координирующих ячеек через контакты 20 подается напряжение, лампа 25 загорается, сигнализируя о том, что координирующая ячейка готова к следующему циклу работы. Вторая группа контактов 39 реле 37 управляет работой блока 4 реверса, выходное реле 62 которого изменяет свое состояние через такт срабатывания реле 37. Контактные группы 63 реле 62 изменяют на обратную полярность напряжение, питающее двигатель приводов. Помимо обеспечения паузы, реле 46 управляет работой ячейки 5 слежения и работой электромагнитного счетчика циклов 9. Через контакты 49 оно управляет ячейкой 5 слежения, которая представляет собой электронное реле времени. При срабатывании и отпускании реле-46 его контакты 49 периодически подключают конденсатор 66 либо к зарядной цепи, состоящей из резисторов 67 и 68, либо к разрядному резистору 69. При этом подключение к зарядной цепи происходит в период работы приводов, а к разрядной цепи - во время паузы.
Если в силу каких-либо причин время работы любого объекта превысит время настройки ячейки 5 слежения, устанавливаемое при помощи переменного резистора 67, то срабатывает реле 70. Контакты 71 этого реле, замыкаясь, вызовут срабатывание блока 3 паузы и выключение питания всех приводов через контакты 47 а через контакты 72 поступит напряжение на зуммер 74. По состоянию контрольных ламп 24 и 25 определяют, в каком объекте возник отказ. Так как реле 70 управляется током тиристора 65, то для последующего включения устройства нажимают кнопку 73,разрываю1цую цепь питания этого тиристора. Каждый раз, когда срабатывает реле 46, замыкаются его контакты 50, через которые подается питание на счетчик 9. Благод,аря тому, что в цепь обмотки счетчика 9 включен диод 10, счетчик будет срабатывать лищь при определенной полярности поступающего на него напряжения. Этим достигается подсчет только целых циклов движения пальцев кисти:сгибание + разгибание.
При необходимости можно выключить один или несколько испытуемых объектов, продолжая испытания остальньгх. Для этого необходимо перевести тумблер 33 соответствующей координирующей ячейки и один из выключателей 79-82 соответствующего кана.па в положение «выключено.
Устройство дает возможность контролировать стабильность во времени некоторых параметров испытуемых объектов (время движения звеньев механизма привода из одного крайнего положения в другое, величину рабочего и максимального тока двигателя привода) и техническое состояние объекта, проявляющееся в изменении нагрузки на двигатель при работе привода. Для этого к гнездам 88 и 89 подключают вход электронного осциллографа (на чертеже не показан). В этом случае оставляют работающим лищь контролируемый объект, остальные должны быть отключены от цепей управления и питания тумблерами 33 и выключателями 79-82 соответственно. Для калибровки чувствительности осциллографа трехпозиционный ключ 8 переводят в среднее положение и, периодически нажимая.на кнопку 78, при помощи переменного резистора 77 устанавливают выбранную величину калибровочного тока, контролируя ее по амперметру 75.
Координирующие ячейки получают сигнал о выполнении объектов движения в заданном объеме от микропереключателей, Я15ляющихся датчиками контроля выполнения заданных движений и срабатывающих при воздействии на них звеньев механизма в крайних положениях.
Каждая координирующая ячейка отключает «свой объект от цепей питания после выполнения им заданного объема движения и сигнализирует об этом световым индикатором. Координирующие ячейки связаны между собой и с ячейкой управления блоком паузы и блоком реверсирования таким образом, что пауза и реверсирование движения испытуемых объ ектов могут быть осуществлены лищь после того, как заданное программой испытаний движение будет полностью выполнено последним
из испытуемых объектов, причем очередное движение звеньев всех объектов начинается одновременно.
Таким образом, исключается возможность рассогласования работы испытуемых объектов и сбоя программы испытаний.
Формула изобретения
Устройство для испытания исполнительных механизмов протезов с электроприводами, содержащее блоки паузы, реверса и счетчик циклов, отличающееся тем, что, с целью имитации реальных условий эксплуатации исполнитель ных механизмов и получения достоверных результатов при испытании на надежность и долговечность, оно имеет блок управления, реле времени и координирующие ячейки по числу испытуемых механизмов, причем блок управления соединен с блоками паузы, реверса и координирующими ячейками, а блок паузы соединен с реле времени и счетчиком циклов; Источники информации, принятые во внимание при экспертизе:
1. .Авторское свидетельство СССР № 196249, М. КЛ.2 А 61 В 5/04. 1967.

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для испытаний электроприводов протезов | 1979 |
|
SU854386A1 |
| Счетчик с неразрушающейся информацией | 1989 |
|
SU1651380A1 |
| УСТАНОВКА ДЛЯ ИСПЫТАНИЙ БИОЭЛЕКТРИЧЕСКИХ СИСТЕМ УПРАВЛЕНИЯ | 1967 |
|
SU196249A1 |
| УСТРОЙСТВО ДЛЯ МНОГОКАНАЛЬНОЙ СИГНАЛИЗАЦИИ | 2005 |
|
RU2297672C1 |
| Устройство для испытания на искробезопасность шахтной электроаппаратуры | 1982 |
|
SU1035240A1 |
| Схема управления автоматическими коробками скоростей металлорежущих станков | 1985 |
|
SU1260914A2 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО РЕЗЕРВИРОВАНИЯ СИГНАЛЬНЫХ ЛАМП | 1991 |
|
RU2047907C1 |
| Двухдвигательный электропривод | 1989 |
|
SU1741246A1 |
| Устройство для тренировки скелетных мышц человека | 1986 |
|
SU1335258A1 |
| УСТРОЙСТВО ДЛЯ МНОГОКАНАЛЬНОЙ СИГНАЛИЗАЦИИ | 2009 |
|
RU2406157C2 |