Изобретение относится к радиолокации и может использоваться для измерения дальности цели в обзорных радиолокационных станциях (РЛС) с цифровой обработкой сигналов.
Известен измеритель координат по пачке бинарно-квантованных сигналов, содержащий квантизатор, обнаружитель, генератор импульсов дальности, счетчик дальности и счетчик обнаружений [1].
Однако такой измеритель имеет невысокую точность дальнометрии, которая зависит от интервала временного квантования tk, обычно выбираемого из условия сохранения разрешающей способности РЛС примерно равным длительности зондирующего импульса τи. При этом точность измерения характеризуется среднеквадратической ошибкой оценки времени запаздывания
Выбор интервала временного квантования tk, соизмеримого с длительностью зондирующего импульса τи, ограничивает точность измерения дальности. Увеличение точности дальнометрии известного измерителя путем уменьшения интервала tк не представляется возможным, поскольку возникающий при этом эффект дробления пачки приводит к появлению ложных целей, расположенных на смежных строках ("кольцах") дальности.
Наиболее близким техническим решением к изобретению является цифровой дальномер, содержащий последовательно соединенные квантизатор и обнаружитель, счетчик обнаружений, блок считывания, счетчик дальности, регистр совпадений и генератор импульсов, первый выход которого соединен с управляющими входами квантизатора и обнаружителя, а второй выход - с управляющим входом блока считывания и счетным входом счетчика дальности, причем выходы счетчика дальности соединены с первыми входами регистра совпадений, а выход блока считывания соединен с вторыми входами регистра совпадений [2].
Однако в таком дальномере повышение точности с помощью нониусного метода возможно только при сочетании аналогового обнаружения и цифрового измерителя. При цифровом построении обнаружителя схема не обеспечивает повышения точности измерения, поскольку сигнал обнаружения в этом случае выдается в дискретные моменты времени, кратные интервалу tк. Таким образом, уже при квантовании радиолокационных сигналов теряется информация об истинной дальности цели, что приводит к появлению ошибки, обусловленной временной дискретностью.
Цель изобретения - повышение точности измерений.
Для этого в предлагаемый цифровой дальномер введены блок фиксации окончания обнаружения, элемент задержки, элемент ИЛИ и последовательно соединенные инвертор кода и сумматор, причем выход обнаружителя соединен с первым входом элемента ИЛИ, выход блока фиксации окончания обнаружения - с выходом элемента задержки, вторым входом элемента ИЛИ и выходом блока считывания. Выход элемента задержки связан с обнуляющим входом счетчика обнаружений, выход элемента ИЛИ - с четным входом счетчика обнаружений, выходы которого соединены с соответствующими входами инвертора кода. Выходы регистра совпадений соединены с вторыми входами сумматора, а выход блока фиксации окончания обнаружения соединен с выходом обнаружителя.
На фиг.1 показана структурная электрическая схема предлагаемого дальномера; на фиг. 2 приведены эпюры, поясняющие его работу; на фиг.3 изображен блок фиксации окончания обнаружения.
Дальномер содержит последовательно соединенные квантизатор 1 и обнаружитель 2, счетчик 3 обнаружений, блок 4 считывания, счетчик 5 дальности, регистр 6 совпадения и генератор 7 импульсов, первый выход которого соединен с управляющими входами квантизатора 1 и обнаружителя 2, а второй выход - с управляющим входом блока 4 считывания и счетным входом счетчика 5 дальности. Выходы счетчика 5 дальности связаны с первыми входами регистра 6 совпадений, а выход блока 4 считывания - с вторыми входами регистра 6 совпадений. Дальномер содержит блок 8 фиксации окончания обнаружения, элемент 9 задержки, элемент ИЛИ 10 и последовательно соединенные инвертор 11 кода и сумматор 12. Выход обнаружителя 2 соединен с первым входом элемента ИЛИ 10 и входом блока 8 фиксации окончания обнаружения, выход которого соединен с входом элемента 9 задержки, вторым входом элемента ИЛИ 10 и входом блока 4 считывания. Выход элемента задержки соединен с обнуляющим входом счетчика 3 обнаружений, выход элемента ИЛИ 10 - со счетным входом счетчика 3 обнаружений, выходы которого соединены с соответствующими входами инвертора 11 кода, а выходы регистра 6 совпадений соединены с вторыми входами сумматора 12.
Дальномер работает следующим образом. С выхода радиолокационного приемника (на чертеже не показан) на вход квантизатора 1 поступает искаженная шумами пачка импульсов от цели (фиг. 2,а). В квантизаторе 1 импульсы пачки подвергаются амплитудно-временному квантованию. При этом временное квантование осуществляется с интервалом tк, в несколько раз меньшим длительности импульса τи, т.е.  где b > 1. Данное условие обеспечивается соответствующим выбором периода повторения импульсов генератора 7 импульсов, управляющего работой квантизатора 1 и обнаружителя 2, а также автосъемом дальности (блоки 4, 6 и 5). Квантованная пачка изображена на фиг. 2,б. При выбранном интервале временного квантования вместо одного видеоимпульса образуется несколько стандартных импульсов ("единиц"). Квантовая пачка теперь содержит больше информации о временном положении неквантованных импульсов, чем в случае tк ≃ tи. Кроме того, в известной мере сохраняется информация о длительности неквантованных импульсов, что имеет существенное значение для дальнейшей обработки.
где b > 1. Данное условие обеспечивается соответствующим выбором периода повторения импульсов генератора 7 импульсов, управляющего работой квантизатора 1 и обнаружителя 2, а также автосъемом дальности (блоки 4, 6 и 5). Квантованная пачка изображена на фиг. 2,б. При выбранном интервале временного квантования вместо одного видеоимпульса образуется несколько стандартных импульсов ("единиц"). Квантовая пачка теперь содержит больше информации о временном положении неквантованных импульсов, чем в случае tк ≃ tи. Кроме того, в известной мере сохраняется информация о длительности неквантованных импульсов, что имеет существенное значение для дальнейшей обработки.
Обнаружитель 2 обрабатывает поступающие на него квантованные радиолокационные сигналы. При этом пачка, располагаясь в нескольких смежных кольцах дальности (ширина кольца дальности соответствует  ), благодаря сохранению информации о ширине импульса всегда образует какую-то общую зону перекрытия или зацепления по дальности, в которой заданный критерий обнаружения выполняется несколько раз, в результате чего на выходе обнаружителя 2 возникает такое же число следующих друг за другом по дальности сигналов обнаружения (фиг. 2,в). Начальному сигналу обнаружения соответствует дальность Rн, а конечному Rк. Очевидно, что истинная дальность Rи находится между этими значениями, т.е. Rн<Rи<Rк. Общее число отсчетов от каждой цели равно числу обнаружений v (в идеальном случае при отсутствии шумов v=b). Предложенный дальномер позволяет, исключив ложные отсчеты, образовать один отсчет дальности повышенной точности.
), благодаря сохранению информации о ширине импульса всегда образует какую-то общую зону перекрытия или зацепления по дальности, в которой заданный критерий обнаружения выполняется несколько раз, в результате чего на выходе обнаружителя 2 возникает такое же число следующих друг за другом по дальности сигналов обнаружения (фиг. 2,в). Начальному сигналу обнаружения соответствует дальность Rн, а конечному Rк. Очевидно, что истинная дальность Rи находится между этими значениями, т.е. Rн<Rи<Rк. Общее число отсчетов от каждой цели равно числу обнаружений v (в идеальном случае при отсутствии шумов v=b). Предложенный дальномер позволяет, исключив ложные отсчеты, образовать один отсчет дальности повышенной точности.
С выхода обнаружителя 2 последовательность v сигналов (импульсов) обнаружения, соответствующих одной цели и следующих с интервалом  (фиг. 2,в), поступает на вход блока 8 фиксации окончания обнаружения и через элемент ИЛИ 10 - на счетный вход счетчика 3 обнаружений. После первого необнаружения блок 8 образует стандартный импульс (фиг. 2,г). Этот импульс через элемент ИЛИ 10 поступает на счетный вход счетчика 3 обнаружений, показания которого теперь становятся равными v+1. Этот же импульс поступает на блок 4 считывания, который осуществляет считывание показаний счетчика 5 дальности.
(фиг. 2,в), поступает на вход блока 8 фиксации окончания обнаружения и через элемент ИЛИ 10 - на счетный вход счетчика 3 обнаружений. После первого необнаружения блок 8 образует стандартный импульс (фиг. 2,г). Этот импульс через элемент ИЛИ 10 поступает на счетный вход счетчика 3 обнаружений, показания которого теперь становятся равными v+1. Этот же импульс поступает на блок 4 считывания, который осуществляет считывание показаний счетчика 5 дальности.
Пример выполнения блока фиксации окончания обнаружения приведен на фиг. 3. Блок содержит SR-триггер 13, S-вход которого соединен с входом элемента ИЛИ-НЕ 14, другой вход элемента ИЛИ-НЕ 14 подключен к инверсному выходу триггера 13, а выход - к R-входу триггера 13. Блок работает следующим образом. Первый импульс обнаружения переводит триггер 13 в состояние "1", при этом инверсный выход принимает состояние "0". Первое необнаружение на выходе обнаружителя 2, т. е. появление сигнала "0", приводит к появлению "1" на выходе элемента ИЛИ-НЕ 14, которая возвращает триггер 13 в прежнее состояние, в результате чего на выходе элемента ИЛИ-НЕ 14 образуется импульс.
На счетный вход счетчика 5 дальности с генератора 7 импульсов поступают импульсы, следующие с интервалом  .
.
Показания счетчика дальности соответствуют номеру кольца дальности, информация с которого обрабатывается в обнаружителе 2. Таким образом, при появлении первого сигнала обнаружения, соответствующего дальности Rн, показания счетчика дальности равны Nн, а при появлении последнего сигнала обнаружения равны Nк. Поскольку импульс на выходе блока 8 появляется вслед за последним сигналом обнаружения, то считанные с помощью блока 4 считывания и регистра 6 совпадений показания счетчика дальности равны Nк+1. Считывание происходит в момент окончания переходных процессов в счетчике 5 дальности, что обеспечивается появлением импульса считывания на выходе блока считывания между двумя соседними импульсами генератора импульсов и может быть реализовано путем соответствующей задержки выходного импульса блока 8 по отношению к ближайшему импульсу генератора 7 импульсов.
В сумматоре 12 считанные показания счетчика дальности 5 суммируются с представленными в обратном коде с помощью инвертора кода 11 показаниями счетчика 3 обнаружений. При этом показания счетчика обнаружений суммируются с прямым кодом показаний счетчика дальности со сдвигом на один разряд в сторону младших разрядов, что эквивалентно делению на два. Итак на выходе сумматора 12 образуется число
Это число соответствует середине квантованной пачки, т.е. является двоичным кодом истинной дальности цели Rи (фиг. 2).
После поступления на вход сумматора 12 показаний счетчика 3 обнаружений задержанный на соответствующий интервал в элементе 9 задержки выходной импульс блока 8 устанавливает счетчик 3 обнаружения на нуль. Устройство оказывается подготовленным к измерению дальности следующей цели.
Очевидно, что в идеальном случае, т.е. при отсутствии шумов, точность измерения повышается пропорционально уменьшению интервала временного квантования. При наличии шумов точность измерения характеризуется среднеквадратической ошибкой оценки времени запаздывания στ. Проведенное моделирование предложенного дальномера на ЦВМ показало, что за счет образования кода дальности из двух отсчетов, характеризующих временное положение и ширину обнаруженной пачки, среднеквадратическая ошибка измерения времени запаздывания  что по сравнению с величиной, определяемой формулой (1), при выбранном интервале
что по сравнению с величиной, определяемой формулой (1), при выбранном интервале  соответствует повышению точности в 4,5 раза.
соответствует повышению точности в 4,5 раза.
Таким образом, предложенный цифровой дальномер, не допуская ложных отсчетов за счет "дробления пачки", позволяет существенно повысить точность дальнометрии.
| название | год | авторы | номер документа |
|---|---|---|---|
| МОНОИМПУЛЬСНАЯ РАДИОЛОКАЦИОННАЯ СИСТЕМА ОБНАРУЖЕНИЯ И САМОНАВЕДЕНИЯ | 2010 |
|
RU2439608C1 |
| ЦИФРОВОЙ ДАЛЬНОМЕР | 1992 |
|
RU2069003C1 |
| Устройство регулирования уровня квантования | 1975 |
|
SU599241A2 |
| РАДИОЛОКАЦИОННАЯ СТАНЦИЯ | 1994 |
|
RU2083995C1 |
| МОНОИМПУЛЬСНАЯ РАДИОЛОКАЦИОННАЯ СИСТЕМА | 2004 |
|
RU2260195C1 |
| МОДАЛЬНЫЙ ДАЛЬНОМЕР ИМПУЛЬСНО-ДОПЛЕРОВСКОЙ РАДИОЛОКАЦИОННОЙ СТАНЦИИ | 2004 |
|
RU2277714C1 |
| УСТРОЙСТВО МЕЖОБЗОРНОЙ КОМПЕНСАЦИИ ПОМЕХ ДЛЯ КОГЕРЕНТНО-ИМПУЛЬСНОЙ РАДИОЛОКАЦИОННОЙ СТАНЦИИ | 1991 |
|
RU2031414C1 |
| СПОСОБ ОБРАБОТКИ ГИДРОАКУСТИЧЕСКИХ СИГНАЛОВ СО СЛОЖНЫМ ЗАКОНОМ МОДУЛЯЦИИ | 2001 |
|
RU2293356C2 |
| СПОСОБ КОГЕРЕНТНОГО НАКОПЛЕНИЯ РАДИОИМПУЛЬСОВ | 2003 |
|
RU2293347C2 |
| РАДИОЛОКАЦИОННАЯ СТАНЦИЯ | 1993 |
|
RU2037842C1 |


Цифровой дальномер, содержащий последовательно соединенные квантизатор и обнаружитель, счетчик обнаружений, блок считывания, счетчик дальности, регистр совпадений и генератор импульсов, первый выход которого соединен с управляющими входами квантизатора и обнаружителя, а второй выход - с управляющим входом блока считывания и счетным входом счетчика дальности, причем выходы счетчика дальности соединены с первыми входами регистра совпадений, а выход блока считывания соединен с вторыми входами регистра совпадений, отличающийся тем, что, с целью повышения точности, введены блок фиксации окончания обнаружения, элемент задержки, элемент ИЛИ и последовательно соединенные инвертор кода и сумматор, причем выход обнаружителя соединен с первым входом элемента ИЛИ, выход блока фиксации окончания обнаружения соединен с входом элемента задержки, вторым входом элемента ИЛИ и входом блока считывания, выход элемента задержки соединен с обнуляющим входом счетчика обнаружений, выход элемента ИЛИ соединен со счетным входом счетчика обнаружений, выходы которого соединены с соответствующими входами инвертора кода, выходы регистра совпадений соединены с вторыми входами сумматора, а вход блока фиксации окончания обнаружения соединен с выходом обнаружителя.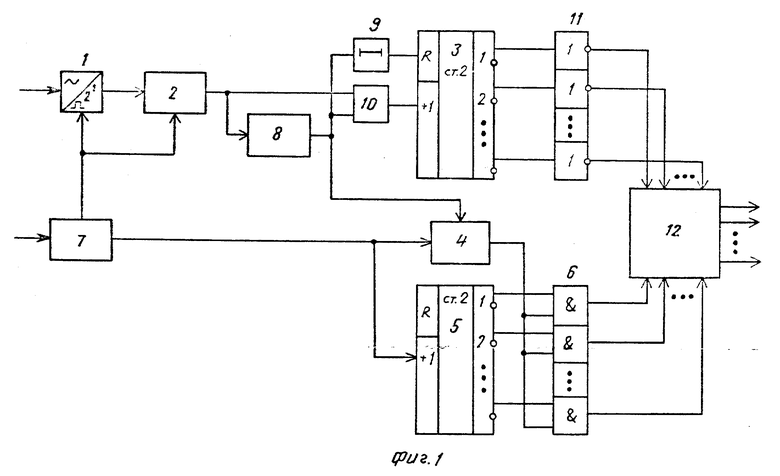
Цифровой дальномер, содержащий последовательно соединенные квантизатор и обнаружитель, счетчик обнаружений, блок считывания, счетчик дальности, регистр совпадений и генератор импульсов, первый выход которого соединен с управляющими входами квантизатора и обнаружителя, а второй выход - с управляющим входом блока считывания и счетным входом счетчика дальности, причем выходы счетчика дальности соединены с первыми входами регистра совпадений, а выход блока считывания соединен с вторыми входами регистра совпадений, отличающийся тем, что, с целью повышения точности, введены блок фиксации окончания обнаружения, элемент задержки, элемент ИЛИ и последовательно соединенные инвертор кода и сумматор, причем выход обнаружителя соединен с первым входом элемента ИЛИ, выход блока фиксации окончания обнаружения соединен с входом элемента задержки, вторым входом элемента ИЛИ и входом блока считывания, выход элемента задержки соединен с обнуляющим входом счетчика обнаружений, выход элемента ИЛИ соединен с счетным входом счетчика обнаружений, выходы которого соединены с соответствующими входами инвертора кода, выходы регистра совпадений соединены с вторыми входами сумматора, а вход блока фиксации окончания обнаружения соединен с выходом обнаружителя.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Сборники статей под ред | |||
| А.Г.Сайбеля | |||
| Труды МАИ, вып | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| М.: Машиностроение, 1968, с | |||
| Разборный с внутренней печью кипятильник | 1922 |
|
SU9A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Автоматизация обработки, передачи и отображения радиолокационной информации | |||
| Под ред | |||
| В.Г.Корякова | |||
| М.: Советское радио, 1975, с.76-78. | |||
