Изобретение предназначено для импульсно-доплеровской радиолокационной станции (ИД РЛС) и служит для измерения дальности цели в режиме обзора при высокой частоте повторения (ВЧП) излучаемых импульсов.
Измерение однозначной дальности в ИД РЛС сопряжено с трудностями из-за малых значений периодов повторения по сравнению с временем задержки, определяемым измеряемой дальностью. Для раскрытия неоднозначности применяются специальные методы измерения, использующие модуляцию излучаемого сигнала.
Для измерения дальности цели в режиме обзора при высокой частоте повторения применяются устройства, основанные на линейно-частотной модуляции несущей частоты (ЛЧМ). Метод ЛЧМ [1] включает последовательное излучение сигнала с линейно частотной модуляцией несущей частоты с определенной крутизной и без линейно частотной модуляции, измерение доплеровских сдвигов частоты сигнала от цели и вычисление дальности до цели делением разности доплеровских сдвигов на удвоенную крутизну s изменения несущей частоты:
Разность доплеровских сдвигов определяется с относительно малой точностью и в ряде случаев не достигается необходимая точность измерения дальности до цели. Например, достоверная оценка дальности возможна лишь при доплеровской скорости, значительно удаленной от собственной скорости истребителя, что снижает тактические характеристики бортовой РЛС при обнаружении цели в районе боковых ракурсов, близких к 4/4, а также на фоне отражений сигнала от земной поверхности.
Более точными и устойчивыми в таких случаях являются устройства, основанные на методах, в которых используется последовательное излучение сигнала из набора дискретных частот повторения импульсов (ЧПИ).
Известны устройства, основанные на вычислении дальности цели по нескольким неоднозначным измерениям в многоканальных системах обнаружения с использованием китайской теоремы об остатках [2]. Этот способ применяется при работе РЛС в режиме средней частоты повторения излучаемых импульсов. В этих алгоритмах используются целочисленные (дискретные) значения неоднозначной дальности. При ошибках измерения неоднозначной дальности, превышающих величину элемента дискретизации, ошибка измерения однозначной дальности намного превышает период повторения импульсов. Использование устройства, основанного на данном методе при работе РЛС в режиме высокой частоты повторения импульсов, приводит к высокому проценту ложных замеров, так как в режиме ВЧП скважность мала и среднеквадратическая ошибка измерения неоднозначной дальности превышает величину элемента дискретизации. Для того чтобы исключить аномальные ошибки измерения однозначной дальности в режиме ВЧП, приходится увеличивать количество частот повторения в наборе, что приводит к увеличению времени радиоконтакта с целью и недопустимо в режиме обзора.
Прототипом изобретения является кодовый дальномер [3] для импульсно-доплеровской РЛС с последовательным излучением сигнала заранее определенного набора частот повторения импульсов, который имеет в своем составе обнаружитель, оперативную память, формирователь кодового слова и постоянное запоминающее устройство (ПЗУ) (эталонную кодовую матрицу). Работа кодового дальномера заключается в формировании кодового слова по информации об обнаружении сигнала на каждой частоте повторения импульсов и определении дальности цели путем сопоставления сформированного кодового слова и кодового слова в эталонной таблице, содержащей наборы дальностей и соответствующие им кодовые слова. Измеренной дальностью считается дальность, которой соответствует сформированное по результатам измерения кодовое слово. Кодовое слово представляет собой последовательность кодов на частотах повторения импульсов. Значение кода на данной частоте повторения импульсов представлено в квантованной форме, где величиной кванта является длительность строба, а количество разрядов ограничивается числом стробов приемного канала внутри периода. Кодовый дальномер в ряде случаев превышает пределы допустимых ошибок определения дальности, так как кодовое слово определяется с недостаточной точностью и дальность до цели определяется по эталонной таблице с ошибками. В некоторых системах измерения дальности с использованием реально существующего кодового дальномера имеется до 12% ложных замеров дальности. При увеличении требуемой максимальной дальности и числа стробов по дальности, а следовательно, длины кода происходит экспоненциальный рост величины кодовой таблицы, что часто недопустимо увеличивает время вычисления дальности.
Задачей изобретения является создание устройства измерения дальности в импульсно-доплеровской РЛС в режиме обзора с высокой частотой повторения излучаемых импульсов, которое позволяет уменьшить время радиоконтакта с целью (время нахождения луча антенны на цели) за счет повышения точности измерения дальности и уменьшения числа ложных замеров.
Для решения этой задачи в известное устройство вводятся вычислитель неоднозначной дальности 10, блок оперативной памяти 11, блок выбора декодирующих частот повторения импульсов 13, блок определения начала пачки 7, блок определения окончания пачки 8, блок определения однозначной дальности, состоящий из вычислителя возможных значений однозначной дальности 14, вычислителя значений весовой функции возможных значений однозначной дальности 15 и селектора вероятных значений из возможных значений дальности 16, и блок выбора 17 (см. фиг.1).
Вычислитель неоднозначной дальности 10 предназначен для определения неоднозначной дальности и амплитуды отраженного сигнала по амплитудам отраженного сигнала в стробах приемника.
Блок оперативной памяти 11 предназначен для запоминания значений неоднозначных дальностей и амплитуд сигнала набора частот повторения.
Для упрощения теорему об остатках будем называть декодированием, а используемые при декодировании неоднозначные дальности - декодирующими неоднозначными дальностями.
Блок выбора декодирующих частот повторения импульсов 13 предназначен для выбора k неоднозначных дальностей из n, измеренных с более высокой точностью, чем остальные (n-k) неоднозначных дальностей.
Блок определения однозначной дальности предназначен для расчета однозначной дальности по "китайской" теореме об остатках [2] с учетом величины интервалов оценивания неоднозначной дальности. Сведения относительно того, каким образом осуществляется расчет однозначной дальности по "китайской" теореме об остатках, приведены ниже при описании блока определения однозначной дальности (стр. 10).
Блок выбора 17 предназначен для выбора однозначной дальности в пачке, соответствующей максимуму суммарной амплитуды.
Блок определения начала пачки 7 реализует критерий обнаружения цели (измерения дальности до нее) "m/n", где m - количество частот, на которых обнаружена цель, из набора n частот повторения импульсов. В импульсно-доплеровских РЛС, использующих для измерения дальности набор дискретных частот повторения, применяют критерии "2/7", "3/8" [4], [5], [6].
Блок определения окончания пачки 8 предназначен для исключения расщепления пачки на несколько частей, соответствующих целям с различными значениями азимута (для разрешения целей по азимуту).
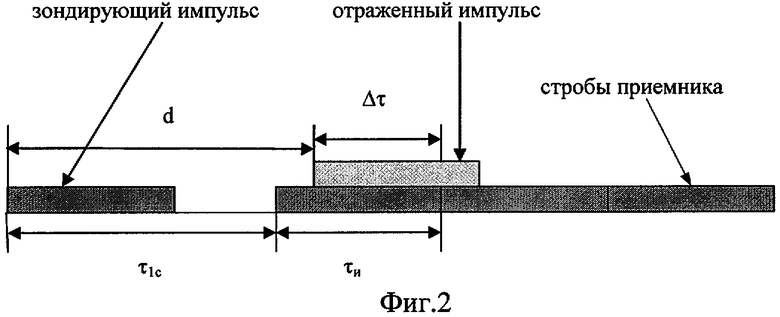
Изобретение представлено чертежами. На фиг.1 приведена блок-схема модального дальномера импульсно-доплеровской РЛС. На фиг.2 показана схема излучения и приема отраженного сигнала на одной частоте повторения импульсов: излучаемый и отраженный импульсы, а также зона приема, разделенная на стробы приемника, на фиг.3 - алгоритм выбора декодирующих частот повторения, на фиг.4 - алгоритм вычислителя возможных значений однозначной дальности, на фиг.5 - алгоритм вычислителя значений весовой функции возможных значений однозначной дальности, на фиг.6 - алгоритм работы блока выбора вероятных значений из возможных значений дальности, на фиг.7 - алгоритм работы блока выбора, на фиг.8 и 9 - схемы устройств определения начала и окончания пачки.
На фиг.1 представлена блок-схема модального дальномера импульсно-доплеровской РЛС. Он имеет в своем составе антенну 1, передатчик 2, антенный переключатель 3, приемник 4, синхронизатор 5, обнаружитель 6, блок определения начала пачки 7, блок определения окончания пачки 8, первый управляющий ключ (УК) 9, вычислитель неоднозначной дальности 10, блок оперативной памяти 11, второй управляющий ключ 12, блок выбора декодирующих частот повторения импульсов (ЧПИ) 13, блок определения однозначной дальности, состоящий из вычислителя возможных значений однозначной дальности 14, вычислителя значений весовой функции возможных значений однозначной дальности 15, селектора вероятных значений из возможных значений дальности 16, блок выбора 17, третий УК 18.
Антенна 1 соединена через антенный переключатель 3 с передатчиком 2 и приемником 4, управляемыми последовательно соединенным с ними синхронизатором 5, при этом вход обнаружителя 6 соединен с выходом приемника 4, последовательно соединены блок определения начала пачки 7, второй управляющий ключ 12, блок выбора декодирующих частот повторения импульсов 13, блок определения однозначной дальности, состоящий из вычислителя возможных значений однозначной дальности 14, вычислителя значений весовой функции возможных значений однозначной дальности 15 и селектора вероятных значений из возможных значений дальности 16, причем выход блока определения начала пачки 7 соединен с первым входом второго управляющего ключа 12, а выход блока выбора декодирующих частот повторения импульсов 13 связан с входом вычислителя возможных значений однозначной дальности 14, выход которого соединен с вторым входом вычислителя значений весовой функции возможных значений однозначной дальности 15 и третьим входом селектора вероятных значений из возможных значений однозначной дальности 16, причем выход вычислителя значений весовой функции возможных значений однозначной дальности 15 соединен с вторым входом селектора вероятных значений из возможных значений однозначной дальности 16, при этом последовательно соединены блок выбора 17, третий управляющий ключ 18, выход селектора вероятных значений из возможных значений однозначной дальности 16 соединен с входом блока выбора 17, причем его выход связан с вторым входом третьего управляющего ключа 18, также последовательно соединены первый управляющий ключ 9, вычислитель неоднозначной дальности 10, блок оперативной памяти 11, выход которого связан со вторым входом второго управляющего ключа 12, с первым входом вычислителя значений весовой функции возможных значений однозначной дальности 15 и первым входом селектора вероятных значений из возможных значений однозначной дальности 16, при этом выход приемника 4 соединен с первым входом первого управляющего ключа 9, а выход синхронизатора 5 соединен с первым входом вычислителя неоднозначной дальности 10, блок определения окончания пачки 7, второй вход которого связан с выходом блока определения начала пачки 7, а выход его соединен с первым входом третьего управляющего ключа 18, причем выход обнаружителя 6 соединен с входом блока определения начала пачки 7, с первым входом блока определения конца пачки 8 и вторым входом первого управляющего ключа 9, а выход третьего управляющего ключа 18 является выходом дальномера.
Модальный дальномер работает следующим образом.
При проходе луча антенны 1 через цель на выходе приемника 4 образуется последовательность дискретных сигналов, поступающих на вход обнаружителя 6, вырабатывающего стандартный импульс при превышении сигналом порога. Импульсы с выхода блока 6 поступают на входы блоков определения начала пачки 7 и окончания пачки 8. Блок определения окончания пачки 8 включается после срабатывания блока определения начала пачки 7 во избежание ложных срабатываний в моменты нахождения луча антенны вне цели.
Сигналы с выхода приемника 4 поступают на вход обнаружителя 6 и на сигнальный вход первого УК 9. При превышении сигналом порога на выходе обнаружителя 6 появляется стандартный сигнал, поступающий на управляющий вход первого УК 9. С выхода первого УК 9 значения амплитуд сигнала в стробах приемника поступают на первый вход вычислителя неоднозначной дальности 10, одновременно на второй вход вычислителя неоднозначной дальности 10 из синхронизатора 5 поступают значения параметров, соответствующих частоте повторения импульсов, на которой получен отраженный сигнал. С выхода вычислителя неоднозначной дальности 10 вычисленные значения неоднозначной дальности и соответствующей ей амплитуды сигнала поступают на вход блока оперативной памяти 11 и запоминаются там в ячейке с номером j, соответствующим частоте Тj. При получении сигнала от блока определения начала пачки 7 запомненная последовательность неоднозначных дальностей и амплитуд сигнала через второй управляющий ключ 12 поступает на вход блока выбора декодирующих ЧПИ 13 и в нем выбирается k неоднозначных дальностей. Последовательности выбранных неоднозначных дальностей и амплитуд сигнала поступают на вход блока определения однозначной дальности при выполнении критерия начала пачки.
Блок определения однозначной дальности, состоящий из вычислителя возможных значений однозначной дальности 14, вычислителя значений весовой функции возможных значений однозначной дальности 15 и селектора вероятных значений из возможных значений дальности 16, определяет однозначную дальность следующим образом. Вычислитель возможных значений однозначной дальности 15 по выбранным неоднозначным дальностям с учетом интервала оценок неоднозначной дальности формирует возможные значения неоднозначных дальностей и рассчитывает список возможных значений однозначной дальности по известной "китайской" теореме об остатках [2], подробное изложение которой приведено ниже.
Вычислитель значений весовой функции возможных значений однозначной дальности 15 рассчитывает значения весовой функции, соответствующие полученным возможным значениям однозначной дальности. Селектор вероятных значений из возможных значений дальности 16 выбирает из списка возможных значений дальность с максимальным значением весовой функции и рассчитывает суммарную амплитуду сигналов набора n частот повторения импульсов. Дальность и суммарная амплитуда поступают на вход блока выбора 17. В блоке выбора 17 выбирается дальность с максимальной суммарной амплитудой путем сравнения с суммарными амплитудами, полученными на предыдущих тактах пачки. Полученное значение дальности поступает на сигнальный вход третьего управляющего ключа 18. После прохождения луча антенны через цель на выходе блока определения окончания пачки 8 появляется сигнал, поступающий на управляющий вход третьего управляющего ключа 18, через выход которого вычисленное значение дальности цели поступает на выход дальномера.
Приведем примеры конкретного выполнения отдельных элементов, из которых состоит устройство изобретения. Назначение этих блоков приведено выше.
Вычислитель неоднозначной дальности 10 может быть реализован с помощью алгоритма, приведенного в [7]. На вход вычислителя неоднозначной дальности поступают из приемника амплитуды в стробах приемника Аij, где i - номер строба по дальности (1≤i≤ns), j - номер частоты повторения (1≤j≤n), от синхронизатора - значения параметров, соответствующих данной частоте повторения: длительность импульса τи, длительность строба приемного канала τc, начало первого строба дальности τ1c. Выходными параметрами вычислителя неоднозначной дальности являются неоднозначная дальность dj и амплитуда сигнала Bj. Неоднозначная временная задержка определяется временем задержки фронта отраженного импульса (фиг.2):

где
Δτij - часть отраженного импульса на частоте повторения с номером j, попавшая в i-й строб,
τи - длительность импульса,
τс - длительность строба приемного канала,
τ1c - начало первого строба дальности.
Из формулы видно, что для определения неоднозначной временной задержки достаточно определить долю импульса, попавшего в строб приемника. Часть отраженного импульса в стробе приемника пропорциональна амплитуде сигнала в стробе:
где
Аij - амплитуда сигнала в стробе с номером i на частоте повторения Тj,
Bj - амплитуда отраженного сигнала в стробе на частоте повторения Tj.
Выходные параметры вычислителя неоднозначной дальности 10 поступают на вход блока оперативной памяти 11. Выходными параметрами блока оперативной памяти 11 являются последовательности из n неоднозначных дальностей dj, j=1...n и амплитуд сигнала Bj, j=1...n. Блок оперативной памяти 11 может быть реализован на стандартных микросхемах запоминающих устройств (ЗУ), приведенных в [8].
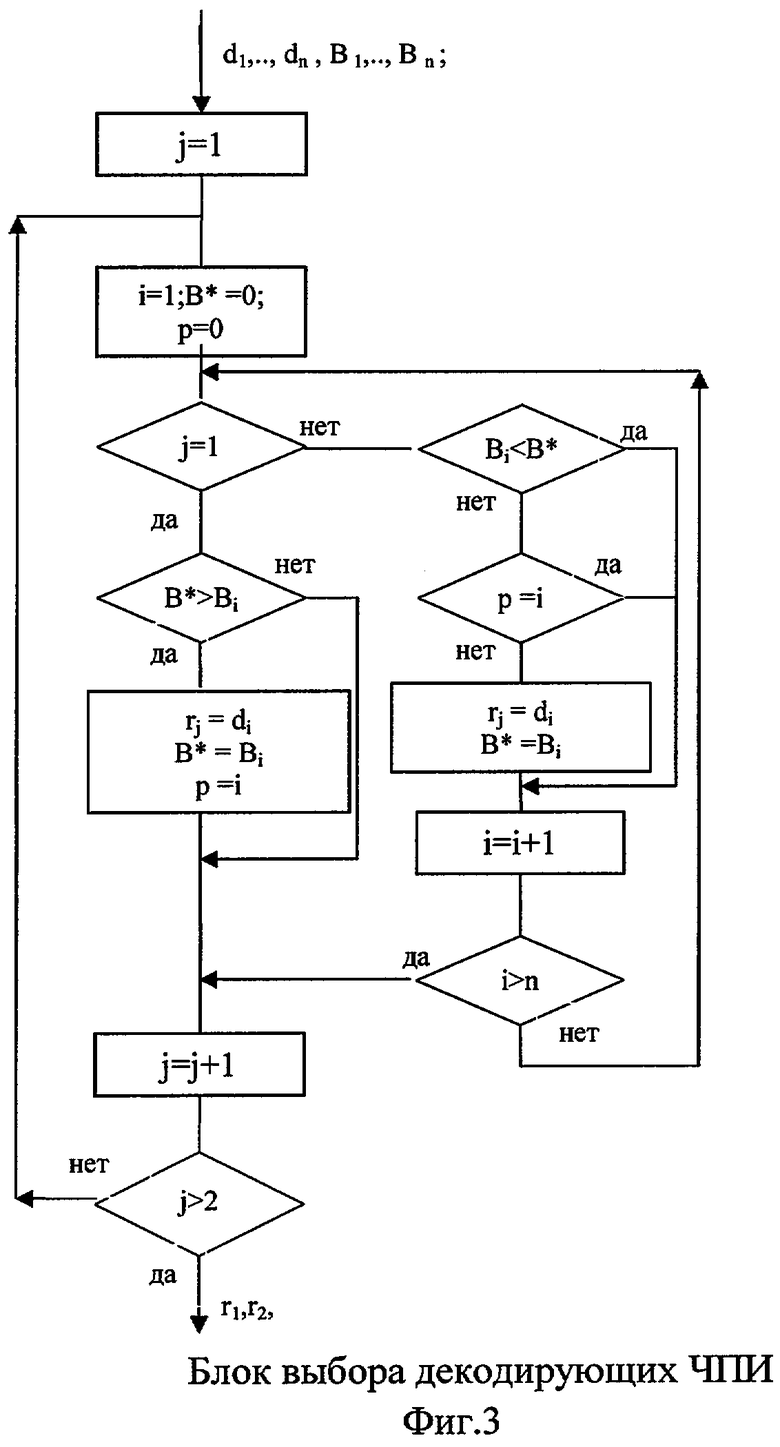
На фиг.3 представлен пример алгоритма работы блока выбора декодирующих частот повторения импульсов 13 в случае выбора k=2 частот повторения импульсов. На вход блока выбора декодирующих ЧПИ из блока оперативной памяти поступают наборы неоднозначных дальностей d1,...,dn и соответствующих им амплитуд сигнала B1,..., Bn. В алгоритме из n частот повторения импульсов выбираются k частот, на которых амплитуды Bj превышают амплитуды сигнала на других частотах повторения импульсов. Выходными параметрами алгоритма являются неоднозначные дальности r1, r2.
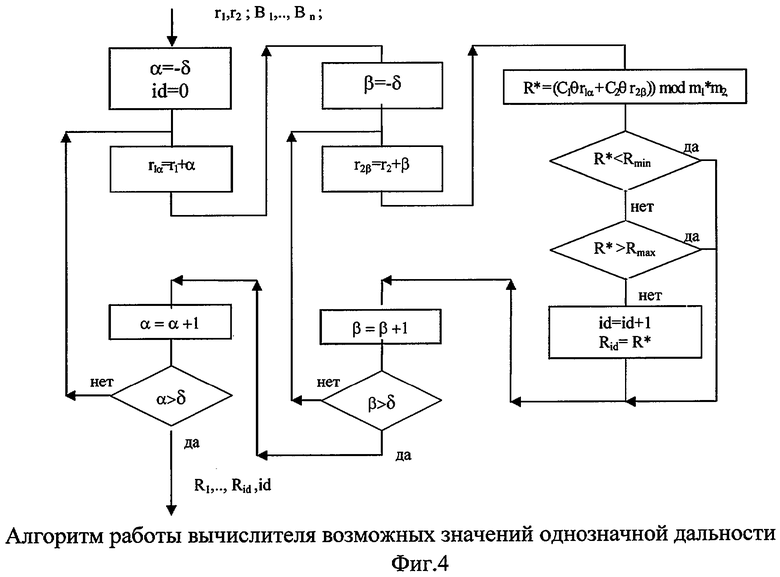
Алгоритм работы вычислителя возможных значений однозначной дальности 14 приведен на фиг.4. На вход поступает список выбранных неоднозначных дальностей r1, r2. В алгоритме сначала формируются возможные значения неоднозначных дальностей r1α,r2β, где r1α=r1+α, r2β=r2+β, принимающих значения из интервалов оценок неоднозначных дальностей {r1-δ, r1+δ}, {r2-δ, r2+δ} соответственно, где δ - заданный размер интервала оценки неоднозначной дальности. Расчет возможного значения однозначной дальности производится по "китайской" теореме об остатках [2], формула которой в случае двух частот повторения:

где
частоты повторения связаны между собой отношениями взаимно простых целых чисел mi, mj:
где
u - величина кванта.
Взаимно простыми числами называются числа mi, mj, наибольший общий делитель которых НОД (mi, mj) равен 1. Формула (3) означает, что R* равно остатку члена, заключенного в скобки, при делении его на mi·mj столько раз, сколько возможно. Заданные константы Сi, Cj связаны с mi, mj следующими уравнениями:
Ci=bi·mj≡(l)mod(mj),
Cj=bj·mi≡(l)mod(mi),
где
bi - наименьшее положительное число, которое при умножении на mj и делении на mi дает 1 как остаток (то же справедливо и для остальных b).
Далее в алгоритме проверяется выполнение условия
Rmin<R*<Rmax,
где
Rmin - минимальное возможное значение дальности,
Rmax - максимальное возможное значение дальности.
Если это условие выполняется, то счетчик возможных значений дальности id увеличивается на 1 и однозначной дальности Rid присваивается значение R*. Выходными параметрами алгоритма являются количество элементов id в списке и список возможных значений дальности Ri, i=1,..., id.
Алгоритм вычислителя значения весовой функции возможных значений однозначной дальности 15 рассчитывает функцию, которая характеризует отклонение неоднозначных дальностей, соответствующих возможному значению дальности, от измеренных неоднозначных дальностей.
Значение весовой функции Vi, соответствующее возможному значению дальности Ri, может быть рассчитано по формуле, которая представляет собой пересечение интервалов, границами которых являются значения измеренной неоднозначной дальности, уменьшенной или увеличенной на величину максимальной ошибки *:

где
gj≡Ri mod mj - неоднозначная дальность gj, соответствующая возможной однозначной дальности Ri (остаток от деления Ri на mj),
dj - измеренная неоднозначная дальность,

δ - заданный размер интервала оценок определения неоднозначной дальности.
Весовая функция может быть задана формулой, которая является суммой квадратов отклонений неоднозначных дальностей gj, соответствующих возможной однозначной дальности Ri от измеренных неоднозначных дальностей dj:

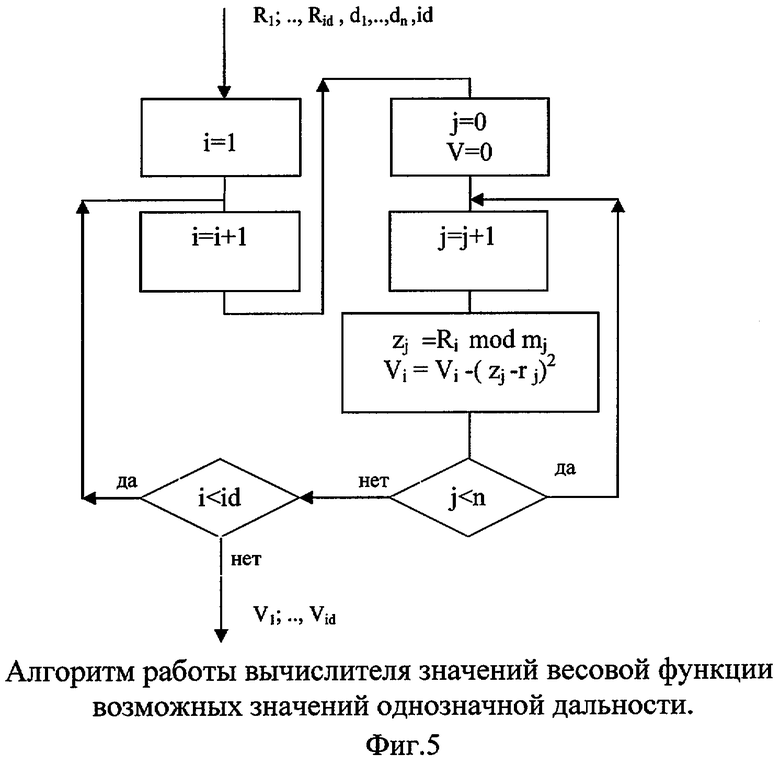
Алгоритм работы вычислителя значений весовой функции возможных значений однозначной дальности 15 по формуле (4) приведен на фиг.6. На вход алгоритма поступает количество элементов id в списке, список возможных значений дальности Ri, i=1,...,id и набор неоднозначных дальностей d1,...,dn. Для каждого элемента списка Ri рассчитывается значение весовой функции Vi.. На выход алгоритма поступает список рассчитанных значений весовой функции Vi, i=1,...,id, соответствующих возможным значениям дальности.
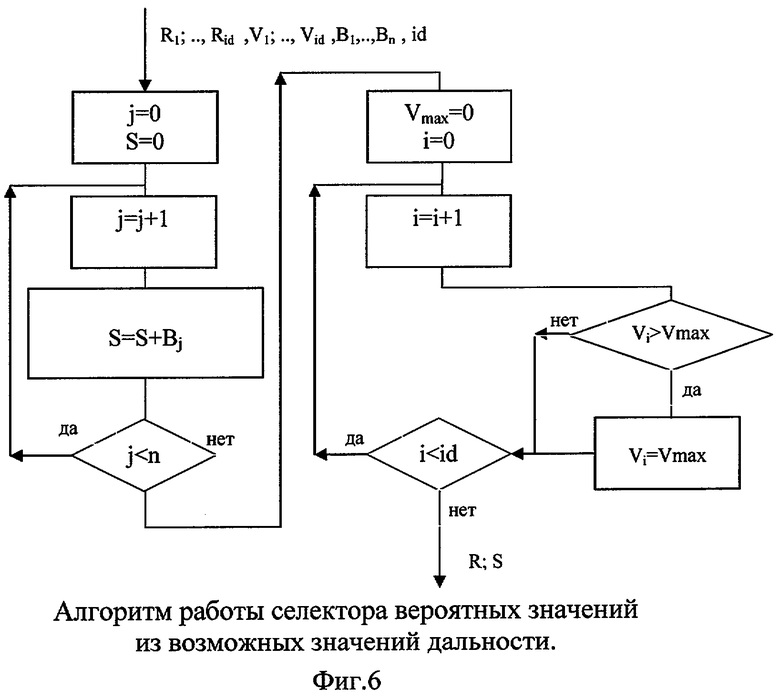
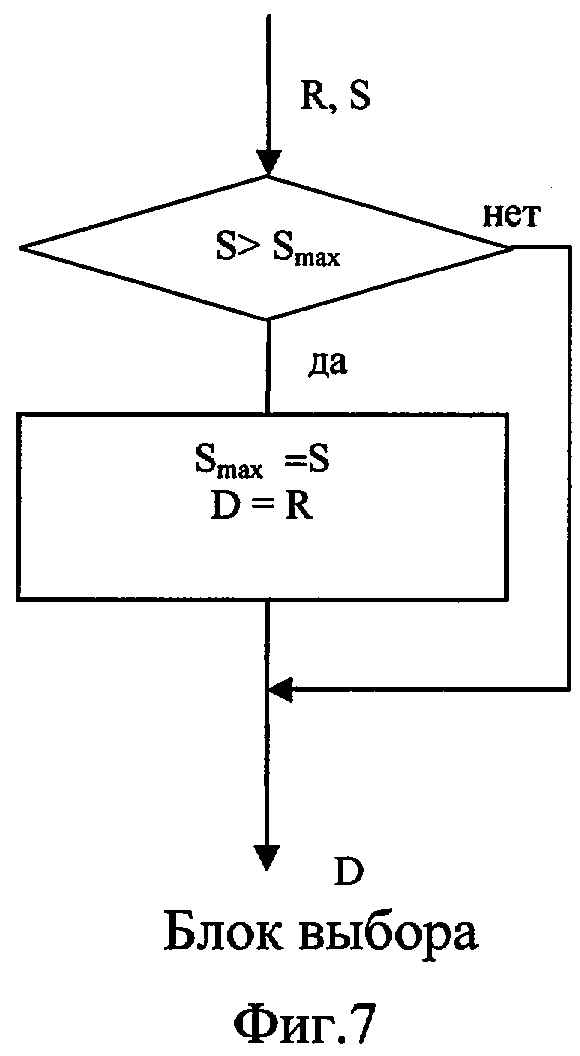
Алгоритм работы селектора вероятных значений из возможных значений дальности 16 показан на фиг.7. На вход селектора поступают количество элементов в списке id, списки возможных значений дальности Ri и значений весовой функции Vi, а также амплитуды сигнала Bj j=1,...,n. Определяется значение однозначной дальности из списка возможных значений, которому соответствует максимальное значение весовой функции. Далее в алгоритме рассчитывается суммарная амплитуда - сумма амплитуд сигнала на всех частотах повторения по формуле

Выходные параметры селектора вероятных значений из возможных значений дальности - однозначная дальность R и суммарная амплитуда S.
Блок-схема алгоритма работы блока выбора 17, в котором осуществляется выбор дальности по максимуму суммарной амплитуды, приведена на фиг.7. На вход поступает величина дальности R и суммарная амплитуда S. Значение вновь полученной суммарной амплитуды S сравнивается с максимальной амплитудой Smax, определенной на предыдущих тактах. Если S превысила Smax, то максимальная амплитуда обновляется: Smax=S и запоминается, а значению дальности D присваивается входное значение R, которое и поступает на выход алгоритма выбора.
Управляющий ключ имеет алгоритм, разрешающий или запрещающий поступление входной информации на выход. Реализация работы управляющего ключа приведена в [9].
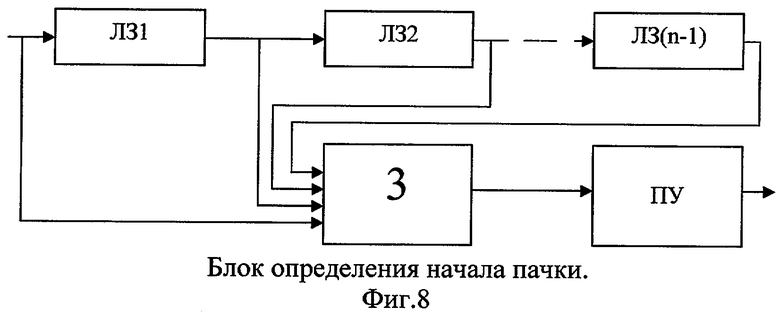
На фиг.8 представлена блок-схема устройства определения начала пачки 7. Устройство состоит из (n-1) линий задержки (ЛЗ), сумматора, порогового устройства (ПУ). На вход первой линии задержки поступает сигнал "1" с выхода обнаружителя 6 при превышении сигналом порога. При значении сигнала на выходе сумматора, равном и большем m, срабатывает пороговое устройство. Реализация блока определения начала пачки приведена в [9].
Блок окончания пачки 8 аналогичен блоку определения начала пачки. В качестве критерия конца пачки может быть принят критерий "наличие серии из n подряд" - отсутствие сигнала на смежных угловых позициях, использующих весь набор из n частот повторения импульсов. На фиг.9 представлен пример реализации блока определения окончания пачки 8. Блок состоит из последовательно соединенных управляющего ключа (УК), инвертора, (n-1) линий задержки, сумматора, порогового устройства, (n-1) входов ЛЗ также соединены с входом сумматора. В момент срабатывания устройства определения начала пачки на управляющий вход УК подается сигнал и через сигнальный вход с выхода поступает последовательность сигналов в виде "1" и "0". Пройдя инвертор, сигналы с выходов линий задержки и входа первой ЛЗ подаются на n входов сумматора. Пороговое устройство срабатывает при сигнале на выходе сумматора, равном n.
Проведенное математическое и полунатурное моделирование измерения дальности цели с использованием модального дальномера показало, что среднеквадратическая ошибка измерения дальности цели по сравнению с прототипом уменьшилась с σ≈1÷1,2 км до σ≈0,15÷0,2 км, процент ложных замеров значительно уменьшился.
Модальный дальномер прошел летные испытания в составе бортовой импульсно-доплеровской станции.
Литература
1. Дудник П.И., Чересов Ю.И. Авиационные радиолокационные устройства. - М.: ВВИА 1986, с.238, 242, 244.
2. Справочник по радиолокации, т.3, под ред. М.Сколника, М.: Сов. радио, с.382-383 - М.: Сов. радио, 1979 г.
3. Патент 2149422, № заявки 99107372 от 05.04.99. Б.В.Брамбург, Ю.Н.Гуськов, А.И.Канащенков, Л.С.Ривес, А.И.Риман, О.А.Сирота.
4. Кузьмин С.З. Основы теории цифровой обработки радиолокационной информации. - М.: Сов. радио, 1974, с.178.
5. The Record of the IEEE 1990. International Radar Conference/ Arlington Virginia, 7-10 May, 1990. Long term integration using a phaud. Array Radar. L.V.Frunk, J.D.Wilson and Hughes II, c.313-315.
6. Финкельштейн М.И. Основы радиолокации. - М.: Сов. радио, 1973, с.402-405.
7. Меркулов В.И., Перов А.И., Саблин В.Н. и др. Радиолокационные измерители дальности и скорости. T.1 - M.: Радио и связь, 1999 г., с.179.
8. Калабеков Б.А. Микропроцессоры и их применение в системах передачи и обработки сигналов, - М.: Радио и связь, 1986, с.63, рис.2.1.
9. Флорес Э.А. Организация вычислительных машин. - М.: 1972, с.21.
| название | год | авторы | номер документа |
|---|---|---|---|
| КОДОВЫЙ ДАЛЬНОМЕР ДЛЯ ИМПУЛЬСНО-ДОПЛЕРОВСКОЙ РАДИОЛОКАЦИОННОЙ СТАНЦИИ | 1999 |
|
RU2149422C1 |
| ДАЛЬНОМЕР ПРИ ВОЗДЕЙСТВИИ ПОМЕХИ, УВОДЯЩЕЙ ПО ДАЛЬНОСТИ | 1997 |
|
RU2119174C1 |
| СПОСОБ ИЗМЕРЕНИЯ ДАЛЬНОСТИ | 1981 |
|
RU2081432C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КОЛИЧЕСТВА, СКОРОСТИ И ДАЛЬНОСТИ ЦЕЛЕЙ И АМПЛИТУД ОТРАЖЕННЫХ ОТ НИХ СИГНАЛОВ ПО ОТВЕТНОМУ СИГНАЛУ В ЦИФРОВОМ КАНАЛЕ РАДИОЛОКАТОРА | 2010 |
|
RU2444758C1 |
| СПОСОБ ИЗМЕРЕНИЯ ДАЛЬНОСТИ | 1985 |
|
RU2145092C1 |
| ИЗМЕРИТЕЛЬ АЗИМУТА | 1997 |
|
RU2117958C1 |
| СИСТЕМА НАВЕДЕНИЯ ЗЕНИТНЫХ УПРАВЛЯЕМЫХ РАКЕТ БЛИЖНЕГО ДЕЙСТВИЯ | 2009 |
|
RU2394202C1 |
| СПОСОБ ОДНОЗНАЧНОГО ИЗМЕРЕНИЯ ДАЛЬНОСТИ ДО МЕТЕОРОЛОГИЧЕСКОГО ОБЪЕКТА | 2015 |
|
RU2592075C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ РАДИАЛЬНОЙ СКОРОСТИ ЛЕТАТЕЛЬНОГО АППАРАТА ПРИ НЕОДНОЗНАЧНЫХ ИЗМЕРЕНИЯХ ДОПЛЕРОВСКОЙ ЧАСТОТЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2021 |
|
RU2796966C1 |
| УСТРОЙСТВО СЕЛЕКЦИИ МАЛОВЫСОТНЫХ МАЛОСКОРОСТНЫХ ВОЗДУШНЫХ ЦЕЛЕЙ И ДВИЖУЩИХСЯ НАЗЕМНЫХ ЦЕЛЕЙ В КОГЕРЕНТНОЙ БОРТОВОЙ РАДИОЛОКАЦИОННОЙ СТАНЦИИ | 2005 |
|
RU2298809C9 |

Изобретение относится к радиолокационной технике и служит для измерения дальности цели в режиме обзора с последовательным излучением сигнала из набора дискретных частот повторения импульсов. Сущность изобретения заключается в том, что по амплитудам в стробах дальности на каждой частоте повторения импульсов определяется оценка неоднозначной дальности. При определении однозначной дальности учитывается величина интервала оценки неоднозначной дальности. Из совокупности полученных возможных (модальных) значений дальности отбирается одно значение, удовлетворяющее определенному критерию. Достигаемым техническим результатом изобретения является уменьшение времени радиоконтакта с целью путем повышения точности измерения дальности и уменьшения числа ложных замеров дальности, что достигается наличием вычислителя неоднозначной дальности, блока оперативной памяти, блока выбора декодирующих частот повторения, блока определения начала пачки, блока определения окончания пачки, блока однозначной дальности, состоящего из вычислителя возможных значений, вычислителя весовой функции и селектора вероятных значений, и блока выбора в схеме дальномера. 9 ил.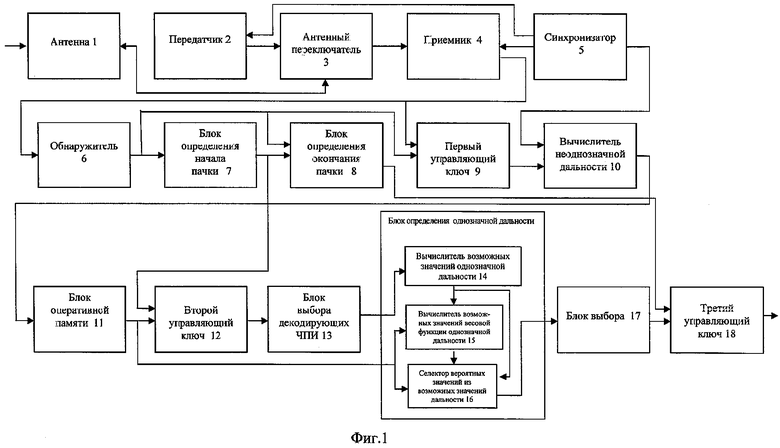
Модальный дальномер, содержащий антенну, соединенную через антенный переключатель с передатчиком и приемником, управляемыми соединенным с ними синхронизатором, обнаружитель, вход которого соединен с выходом приемника, отличающийся тем, что введены последовательно соединенные блок определения начала пачки, второй управляющий ключ, блок выбора декодирующих частот повторения импульсов, блок определения однозначной дальности, состоящий из вычислителя возможных значений однозначной дальности, вычислителя значений весовой функции возможных значений однозначной дальности и селектора вероятных значений из возможных значений дальности, причем выход блока определения начала пачки соединен с первым входом второго управляющего ключа, а выход блока выбора декодирующих частот повторения импульсов связан с входом вычислителя возможных значений однозначной дальности, выход которого соединен с вторым входом вычислителя значений весовой функции возможных значений однозначной дальности и третьим входом селектора вероятных значений из возможных значений дальности, причем выход вычислителя значений весовой функции возможных значений однозначной дальности соединен с вторым входом селектора вероятных значений из возможных значений дальности, выход селектора вероятных значений из возможных значений дальности соединен с входом блока выбора, причем его выход связан с вторым входом третьего управляющего ключа, также последовательно соединены первый управляющий ключ, вычислитель неоднозначной дальности, блок оперативной памяти, выход которого связан со вторым входом второго управляющего ключа, с первым входом вычислителя значений весовой функции возможных значений однозначной дальности и первым входом селектора вероятных значений из возможных значений дальности, при этом выход приемника соединен с первым входом первого управляющего ключа, а выход синхронизатора соединен с первым входом вычислителя неоднозначной дальности, блок определения окончания пачки, второй вход которого связан с выходом блока определения начала пачки, а выход его соединен с первым входом третьего управляющего ключа, причем выход обнаружителя соединен с входом блока определения начала пачки, с первым входом блока определения конца пачки и вторым входом первого управляющего ключа, а выход третьего управляющего ключа является выходом дальномера.
| КОДОВЫЙ ДАЛЬНОМЕР ДЛЯ ИМПУЛЬСНО-ДОПЛЕРОВСКОЙ РАДИОЛОКАЦИОННОЙ СТАНЦИИ | 1999 |
|
RU2149422C1 |
| ИЗМЕРИТЕЛЬ АЗИМУТА | 1997 |
|
RU2117958C1 |
| УСТРОЙСТВО ОПРЕДЕЛЕНИЯ ДАЛЬНОСТИ | 2000 |
|
RU2208813C2 |
| 0 |
|
RU2237265C | |
| US 2004085241 A1, 06.05.2004 | |||
| Способ ультразвуковой сушки сыпучих материалов | 2020 |
|
RU2751423C1 |
| ЕР 1098206 А2, 09.05.2001. | |||

