(54) ЭЛЕКТРОПНЕВМАТИЧЕСКИЙ ПРЕОБРАЗОВАТЕЛЬ
| название | год | авторы | номер документа |
|---|---|---|---|
| Электропневматический аналоговый преобразователь | 1982 |
|
SU1076651A1 |
| Электрогидравлический преобразователь | 1983 |
|
SU1108263A1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ РАСПРЕДЕЛИТЕЛЬ | 2000 |
|
RU2184882C2 |
| Электропневматический преобразователь | 1981 |
|
SU1250743A1 |
| УСТРОЙСТВО ДЛЯ ВАКУУМНОГО МАССАЖА | 1994 |
|
RU2077879C1 |
| Широтно-импульсный модулятор | 1977 |
|
SU667970A1 |
| ГСЕСОЮ< Bl-iAfi СЛ4? •.ПИОТН-.НЛ i | 1973 |
|
SU367447A1 |
| Струйный электрогидропневматический преобразователь | 1977 |
|
SU721567A1 |
| Электропневматическое устройство | 1983 |
|
SU1162275A1 |
| ЭЛЕКТРОПНЕВМАТИЧЕСКИЙ РУЛЕВОЙ ПРИВОД УПРАВЛЯЕМОГО СНАРЯДА | 1999 |
|
RU2157503C1 |
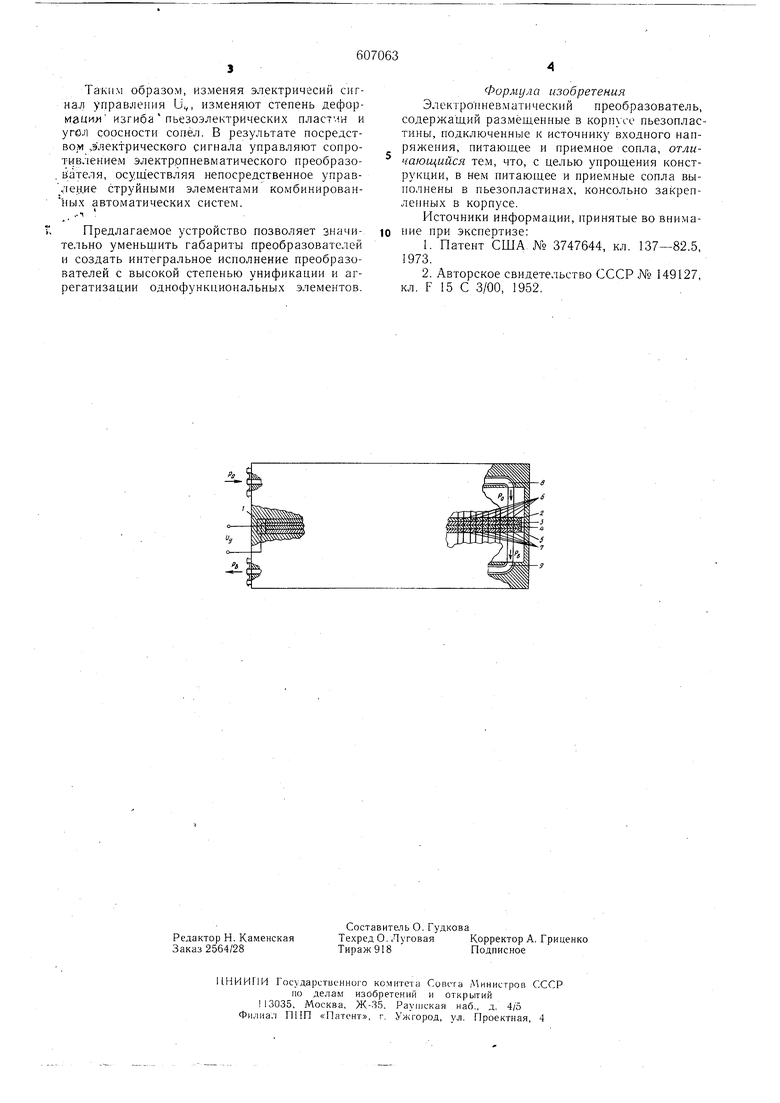
Изобретение относится к области электрогидропневмоавтоматики, а более конкретно к устройствам управления, преобразования разнородных физических сигналов в комбинированных (электрогидравлических, электропневматических) системах управления. Известен электропневмопреобразователь, в котором щит (пьезокерамического) элемента уменьшает ширину сопла и управляет точкой приминания струи в струйном элементе 1. Наиболее близким к данному является электропневматический преобразователь, содержаш,ий размещенные в корпусе пьезопластины, подключенные к источнику входного напряжения, питающее и приемное сопла 2. Недостатком такого устройства является сложность его конструкции. Целью изобретения является упрощение конструкции электропневматического преобразователя. Это достигается благодаря тому, что питающее и приемные сопла выполнены в пьезопластинах, консольно закрепленных в корпусе. Схема электропневматического преобразователя представлена на чертеже. Преобразователь содержит корпус 1 с двумя биморфными пьезопластинами, каждая из которых состоит из двух склеенных разноименными полюсами двухсторонних металлизированных пьезокерамических пластинок 2, 3 и 4, 5. Биморфные пьезопластины консольно зажаты со стороны питания блока в корпусе 1 и примерно с середины до свободного конца по площади поверхности в них соосно расположены отверстия, образующие сопла питания 6 и приемные сопла 7, которые соединены с системой пневмоавтоматики мягкими магистралями 8, 9. Площадь отверстий на поверхности пластин может составлять до 50% от всей площади, а их плотность определяется диаметром отверстий.. При подаче управляющего, напряжения с источника входного напряжения пластинки 3,.4 удлиняются, а пластинки 2, 5 укорачиваются. В результате свободньш конец верхней пьезопластины отклоняется вверх, а нижней - вниз, и угол соосности отверстий-сопел, составляющий в отсутствии управляющего напряжения 180°, уменьшается. Абсолютное изменение угла соосности Да при использовании пьезокерамических пластинок с высокой пьезоактивностью может составлять 10 и более градусов.
Таким образом, изменяя электричесий сигнал управления U, изменяют степень дефориаци 1 изгиба пьезоэлектрических пластин и угол соосности сопел. В результате посредством злектрического сигнала управляют сопротивлением электррпневматического преобразо. йателя, осуществляя непосредственное управлен.ие струйными элементами комбинирован ных автоматических систем. .. 1
Предлагаемое устройство позволяет значительно уменьшить габариты преобразователей и создать интегральное исполнение преобразователей с высокой степенью унификации и агрегатизации однофункциональных элементов.
Формула изобретения
Элекгрои невм ати чески и преобразователь, содержащий размещенные в корпусе пьезопластины, подключенные к источнику входного напряжения, питающее и приемное сопла, отличающийся тем, что, с целью упрощения конструкции, в нем нитающее и приемные сопла выполнены в пьезопластинах, консольно закрепленных в корпусе.
Источники информации, принятые во внимание при экспертизе:
