Изобретение относится к силовым системам управления летательных аппаратов и наиболее целесообразно может быть использовано в рулевых приводах и автопилотах малогабаритных управляемых снарядов.
Известен электропневматический рулевой привод [Л.1 стр. 109 - 157, Л.2 стр. 33 - 88] с газораспределительным устройством струйная трубка - приемные сопла [Л.1 стр. 113 - 117, рис. 3.1, 3.2, 3.4; Л.2 стр. 33 рис. 2.1] систем управления летательными аппаратами.
Наиболее близким аналогом (прототипом) изобретения является пневматический рулевой привод [Л.3 стр. 98 - 149] с газовым усилителем со струной трубкой [Л.3 рис. 2.3, 2.5, 2.7 - 2.9].
В известных электропневматических рулевых приводах, содержащих усилитель и рулевую машину с распределительным устройством со струйной трубкой и электромеханическим преобразователем с якорем, струйная трубка и приемник выполнены круглого сечения.
Недостатком известного технического решения является низкое быстродействие привода при работе на низких рабочих давлениях питания (около 0,1 - 1 кг/см2) при использовании, например, энергии сжатого воздуха (энергии торможения) набегающего воздушного потока при полете управляемого снаряда, скорость которого, а следовательно, давление торможения могут изменяться в широких пределах (от 0,1 до 7 - 15 кг/см2). Поэтому, исходя из этого при работе на низких рабочих давлениях для обеспечения требуемого расхода воздуха для получения заданного быстродействия привода, необходимо существенно увеличивать сечение струйной трубки и приемника, что приводит к недопустимому снижению быстродействия электромеханического преобразователя за счет увеличения максимального хода якоря и увеличения при этом нагрузки на якорь за счет возрастания реакции струи.
Кроме того к недостаткам известного решения следует отнести отсутствие возможности перемещения электромеханического преобразователя с якорем и струйной трубкой относительно приемника при настройке привода, консольность расположения якоря преобразователя при установке струйной трубки в подшипниках, что отрицательно сказывается при работе при действии виброперегрузок как при полете снаряда, так и при работе привода, например, в автоколебательном режиме или релейном, когда якорь перемещается с упора на упор с частотой автоколебаний. Наличие при этом дополнительной составляющей за счет виброперегрузок приводит к увеличению нахождения якоря на одном упоре и уменьшению на другом, а следовательно, к появлению и увеличению ухода нулевого положения привода.
Задачей предлагаемого изобретения является повышение быстродействия электропневматического рулевого привода.
Поставленная задача решается за счет того, что в электропневматическом рулевом приводе управляемого снаряда, содержащем корпус с цилиндрической частью, размещенные в нем релейный усилитель и рулевую машину с распределительным устройством со струйной трубкой и приемником и электромеханическим преобразователем с якорем, трубу для подвода сжатого воздуха в основании струйной трубки, в стенке струйной трубки, перпендикулярной оси вращения трубки, выполнено входное отверстие, выходное же сечение струйной трубки и входные окна приемника выполнены щелевыми, расположенными параллельно оси вращения трубки, труба для подвода воздуха установлена с зазором 0,06 - 0,12 мм напротив входного отверстия струйной трубки, а якорь преобразователя и струйная трубка размещены на оси между опорными подшипниками. Струйная трубка выполнена тонкостенной из пластмассы, в выходном сечении трубки установлены перемычки, посадочные места электромеханического преобразователя выполнены с пазами для взаимно перпендикулярных линейных горизонтальных перемещений преобразователя с якорем и струйной трубкой и прокладками для линейного вертикального перемещения преобразователя. В приводе установлен Г-образный переходник с уплотняющими элементами, соединяющий трубу для подвода воздуха с подводящим каналом сжатого воздуха. На цилиндрической части корпуса рулевого привода в области выхода воздуха из полостей силовых двигателей выполнены отверстия принудительного сброса.
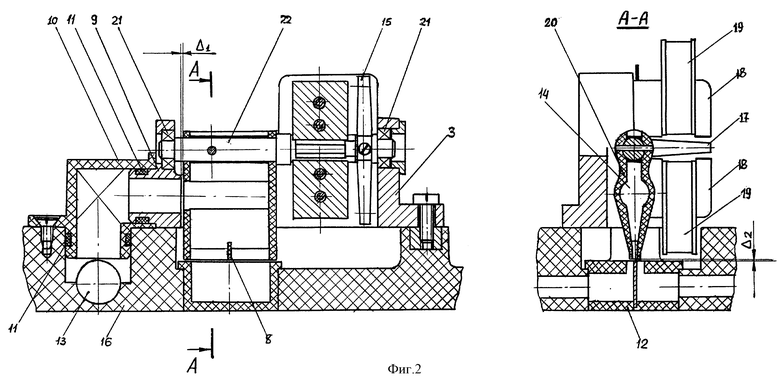
На фиг. 1 представлен электропневматический рулевой привод управляемого снаряда, состоящий из сумматора C(1), релейного усилителя (РУ) 2 и рулевой машины (РМ) 7 в составе электромеханического преобразователя (ЭМП) 3, газового распределительного устройства (ГРУ) 4, исполнительного двигателя (ИД) 5, датчика обратной связи (ДОС) 6. В общем случае в цепи ошибки привода может быть использован корректирующий фильтр для повышения точности работы привода.
Принципиальная конструктивная схема распределительного устройства со струйной трубкой и приемником и электромеханического преобразователя приведена на фиг. 2.
На фиг. 2 представлены электромеханический преобразователь 3, якорь 17, магнитопровод 18, обмотки управления 19, пружина 15, струйная трубка 20, опорные подшипники 21, ось 22, перемычка 8, труба для подвода воздуха 9, Г-образный переходник 10, уплотняющие элементы 11, приемник 12, подводящий канал 13, основание 16 рулевой машины, входное отверстие (окно) 14 струйной трубки 20, зазор Δ 1 между трубой для подвода воздуха и входным отверстием струйной трубки, Δ 2 - зазор между струйной трубкой и приемником.
Устройство работает следующим образом.
В замкнутом контуре рулевого привода (фиг. 1) с релейным усилителем, например, с идеальной релейной статической характеристикой и др., при отсутствии входного сигнала Uвх возникают автоколебания. При автоколебаниях на выходе релейного усилителя возникает сигнал прямоугольной формы с 50%-ной скважностью, который отрабатывается рулевой машиной. Поршень рулевой машины колеблется относительно нулевого положения с частотой автоколебаний. Поршень рулевой машины связан с датчиком обратной связи, сигнал автоколебаний с выхода которого поступает через сумматор на вход релейного усилителя.
При наличии на входе рулевого привода постоянного или медленноменяющегося управляющего сигнала ошибка на выходе сумматора, которая поступает на вход релейного усилителя, содержит кроме высокочастотной составляющей автоколебаний постоянную или медленноменяющуюся составляющую сигнала управления. Скважность сигнала на выходе релейного усилителя из-за наличия в его входном сигнале постоянной или медленноменяющейся составляющей отличается от 50%. Сигнал с выхода релейного усилителя, отличающийся от 50% скважности, отрабатывается рулевой машиной. Поршень рулевой машины перемещается с малой амплитудой автоколебаний относительно ненулевого положения с частотой сигнала управления при медленноменяющемся сигнале с амплитудой, пропорциональной амплитуде сигнала управления.
Сигнал с выхода датчика обратной связи, соединенного с поршнем рулевой машины, поступает на вход сумматора, где суммируется с входным сигналом. С выхода сумматора снимается сигнал ошибки (рассогласования).
При работе привода сжатый воздух рабочего давления от источника сжатого воздуха поступает в подводящий канал 13 основания 16 (фиг. 2) рулевой машины и далее через Г-образный переходник 10, трубу 9 для подвода воздуха во входное отверстие (окно) 14 струйной трубки 20, разделенных зазором Δ 1 = 0,06 - 0,12 мм, струйную трубку 20, щелевидные окна приемника 12, связанные с полостями силового цилиндра рулевой машины. Якорь 17 электромеханического преобразователя 3 расположен на одной оси 22 со струйной трубкой 20 в опорных подшипниках 21. На фиг. 2 пазы для взаимно перпендикулярных линейных горизонтальных перемещений преобразователя 3 с якорем 17 и струйной трубкой 20 и прокладка для линейного вертикального перемещения преобразователя при регулировке зазора Δ 2 между струйной трубкой 20 и приемником 12 и их взаимного положения при настройке привода не показаны, чтобы не усложнять чертеж.
С целью улучшения эксплуатационных характеристик путем обеспечения работоспособности привода при отрицательных температурах без увеличения намагничивающей силы электромеханического преобразователя и при сохранении его динамических характеристик труба для подвода сжатого воздуха установлена с зазором Δ 1 напротив входного отверстия струйной трубки, а площадь ее сечения выполнена равной или большей суммарной площади выходного сечения струйной трубки и зазора Δ 1, а толщина δ стенки входного отверстия струйной трубки определяется соотношением δ ≥D - d,
где D - внутренний диаметр отверстия трубы для подвода сжатого воздуха,
d - внутренний диаметр входного отверстия струйной трубки.
С целью уменьшения момента инерции струйной трубки относительно оси вращения она выполнена тонкостенной и из пластмассы вместо металлической. Для исключения деформации при работе под давлением продольных стенок струйной трубки (схлопывания стенок) введены упрочняющие перемычки, количество которых (от одной и более) определяется для каждого конкретного случая выполнения.
Отверстия принудительного сброса воздуха (на фиг. 2 не показаны из-за их очевидного физического смысла) из полостей силовых двигателей, расположенные на цилиндрической части корпуса рулевого привода, предназначены для исключения подпорки по давлению при работе с большими расходами воздуха внутри свободной части корпуса снаряда, где проток и сброс воздуха затруднен. Наличие этих отверстий сброса приводит к повышению быстродействия привода за счет увеличения при этом его максимального развиваемого момента.
При полете снаряда через эти отверстия создается принудительный отсос (эжекция) воздуха из области сброса, т.е. создается разрежение, при котором давление на выходе становится несколько ниже атмосферного, что также позволяет дополнительно повысить быстродействие рулевого привода за счет дополнительного увеличения его максимального развиваемого момента.
Предлагаемый электропневматический рулевой привод позволил повысить быстродействие привода при работе в широком диапазоне входных давлений сжатого воздуха, обеспечить требуемый расход воздуха при минимальных давлениях при минимальных перемещениях якоря электромеханического преобразователя, обеспечить работу преобразователя и привода в целом при высоких давлениях за счет уменьшения нагрузки на преобразователь от реакции струи. Все это вместе взятое позволило обеспечить требуемые характеристики рулевых приводов существующих и вновь разрабатываемых перспективных малогабаритных управляемых снарядов, использующих энергию торможения набегающего воздушного потока при полете снаряда.
Таким образом, предлагаемый электропневматический рулевой привод по сравнению с известным техническим решением позволяет исключить недостатки существующих электропневматических рулевых приводов и обеспечить требуемые показатели быстродействия приводов для систем управления движением существующих и вновь разрабатываемых управляемых снарядов.
Источники информации:
1. Электропневматический рулевой привод. Кн. Крымов Б.Г., Рабинович Л.В. , Стеблецов В. Г. Исполнительные устройства систем управления летательными аппаратами. М., Машиностроение, 1987 - аналог.
2. Пневматический привод. Кн. Пневмопривод систем управления летательных аппаратов / Под общий редакцией В.А.Чащина, М., Машиностроение, 1987.
3. Пневматический рулевой привод. Кн. Костин С.В., Петров Б.И., Гамынин Н.С. Рулевые приводы. М., Машиностроение, 1973 - прототип.
| название | год | авторы | номер документа |
|---|---|---|---|
| БЛОК РУЛЕВОГО ПРИВОДА УПРАВЛЯЕМОГО СНАРЯДА | 2004 |
|
RU2276771C2 |
| РАЗОМКНУТЫЙ ПНЕВМОПРИВОД СИСТЕМЫ УПРАВЛЕНИЯ ВРАЩАЮЩЕЙСЯ РАКЕТЫ И СПОСОБ КОНТРОЛЯ ЕГО ДИНАМИКИ | 2000 |
|
RU2184340C2 |
| РЕЛЕЙНЫЙ ПНЕВМО-ГИДРОПРИВОД С ВИБРАЦИОННОЙ ЛИНЕАРИЗАЦИЕЙ СИСТЕМ УПРАВЛЕНИЯ РАКЕТ И УСТАНОВОК ВООРУЖЕНИЯ | 2003 |
|
RU2243491C1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ ПРИВОД СИСТЕМ УПРАВЛЕНИЯ РАКЕТ И УСТАНОВОК ВООРУЖЕНИЯ | 2005 |
|
RU2295699C1 |
| СПОСОБ УПРАВЛЕНИЯ ЭЛЕКТРОПНЕВМАТИЧЕСКИМ РУЛЕВЫМ ПРИВОДОМ УПРАВЛЯЕМОГО СНАРЯДА И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2001 |
|
RU2206861C2 |
| СПОСОБ ПРОВЕРКИ РАЗВИВАЕМОГО МОМЕНТА ЭЛЕКТРОПНЕВМАТИЧЕСКОГО РУЛЕВОГО ПРИВОДА УПРАВЛЯЕМЫХ РАКЕТ И СНАРЯДОВ | 2003 |
|
RU2249173C1 |
| АВТОКОЛЕБАТЕЛЬНЫЙ РУЛЕВОЙ ПРИВОД ВРАЩАЮЩЕЙСЯ ПО КРЕНУ УПРАВЛЯЕМОЙ РАКЕТЫ | 2000 |
|
RU2184926C2 |
| ЭЛЕКТРОПНЕВМАТИЧЕСКИЙ РУЛЕВОЙ ПРИВОД УПРАВЛЯЕМОГО СНАРЯДА | 2001 |
|
RU2218549C2 |
| РЕЛЕЙНЫЙ ПНЕВМОПРИВОД С ВИБРАЦИОННОЙ ЛИНЕАРИЗАЦИЕЙ СИСТЕМЫ УПРАВЛЕНИЯ РАКЕТЫ | 2007 |
|
RU2337309C1 |
| АВТОКОЛЕБАТЕЛЬНЫЙ РУЛЕВОЙ ПРИВОД ВРАЩАЮЩЕЙСЯ ПО КРЕНУ УПРАВЛЯЕМОЙ РАКЕТЫ | 2003 |
|
RU2236669C1 |
Изобретение относится к системам управления летательных аппаратов. Электропневматический рулевой привод управляемого снаряда содержит корпус, размещенные в нем релейный усилитель и нулевую машину с распределительным устройством со струйной трубкой и приемником, а также электромеханическим преобразователем с якорем, и трубу для подвода сжатого воздуха в основание струйной трубки. В стенке струйной трубки, перпендикулярной ее оси вращения, выполнено входное отверстие. Выходное сечение струйной трубки и входные окна приемника выполнены щелевыми и расположены параллельно оси вращения трубки. Труба для подвода воздуха установлена с зазором 0,06-0,12 мм напротив входного отверстия струйной трубки. Якорь преобразователя и струйная трубка размещены на оси между опорными подшипниками. Струйная трубка может быть выполнена тонкостенной из пластмассы. Изобретение позволяет повысить быстродействие рулевого привода снаряда. 3 з.п.ф-лы, 2 ил.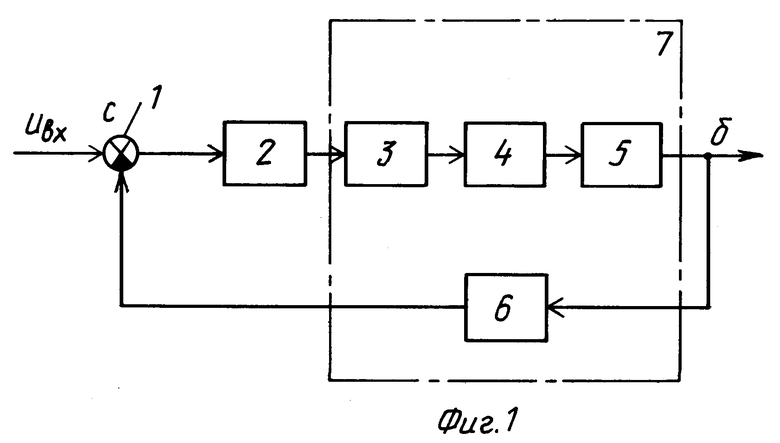
| КОСТИН С.В | |||
| и др | |||
| Рулевые приводы | |||
| - М.: Машиностроение, 1973.RU 2092784 С1, 10.10.1997 | |||
| АВТОКОЛЕБАТЕЛЬНЫЙ АВТОПИЛОТ УПРАВЛЯЕМОГО СНАРЯДА | 1996 |
|
RU2115086C1 |
| US 3794276, 26.02.1974 | |||
| US 4773620, 27.09.1988 | |||
| Внутренний инструмент косовалкового стана | 1985 |
|
SU1242271A1 |
| СПОСОБ ПОДГОТОВКИ К ХРАНЕНИЮ ЧЕСНОКА СВЕЖЕГО СПЕЦИАЛЬНОГО НАЗНАЧЕНИЯ | 2005 |
|
RU2294084C1 |

