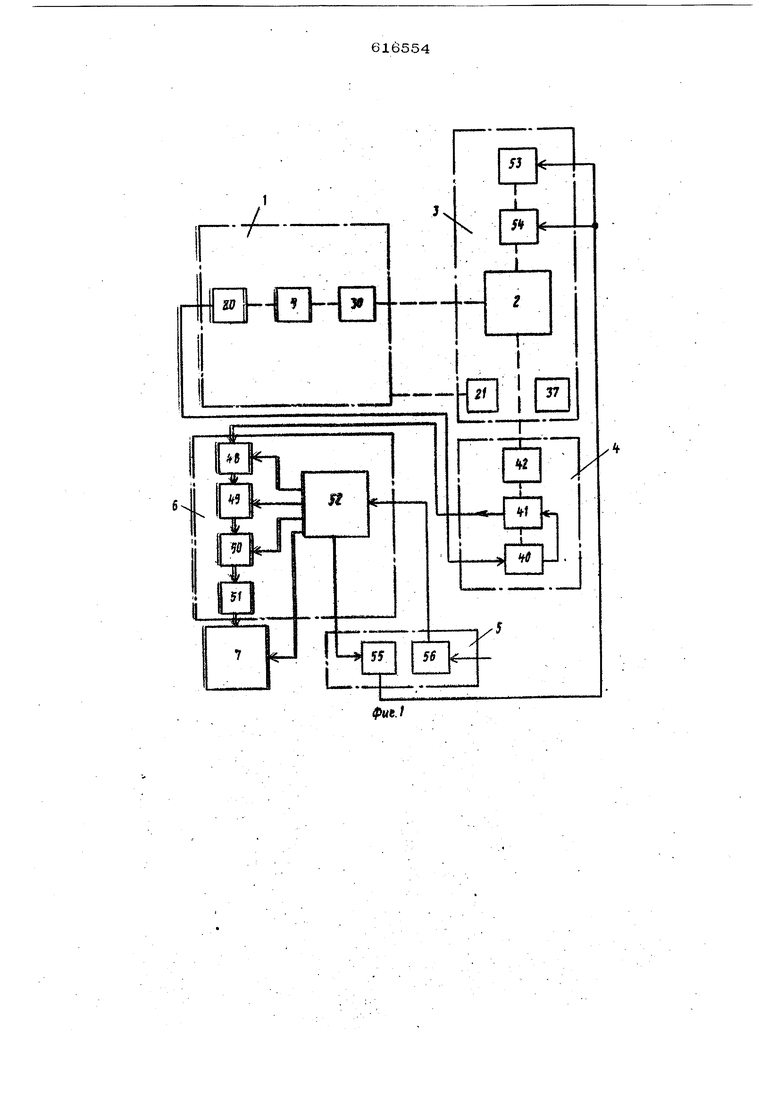
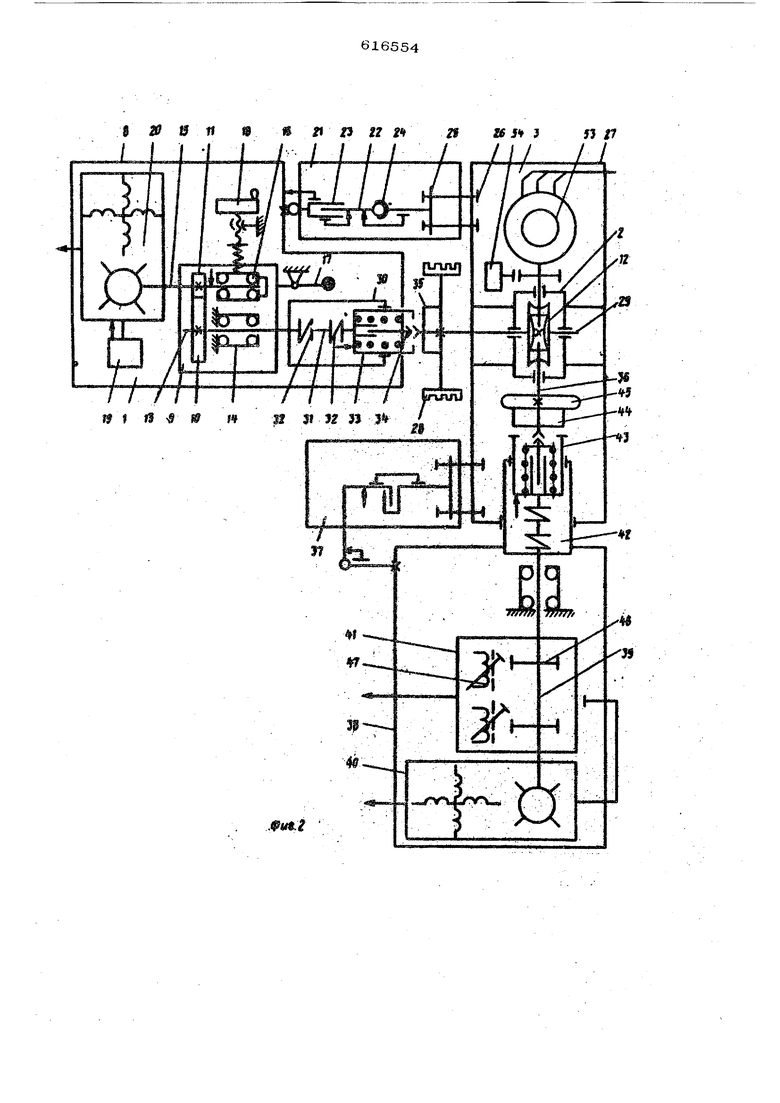
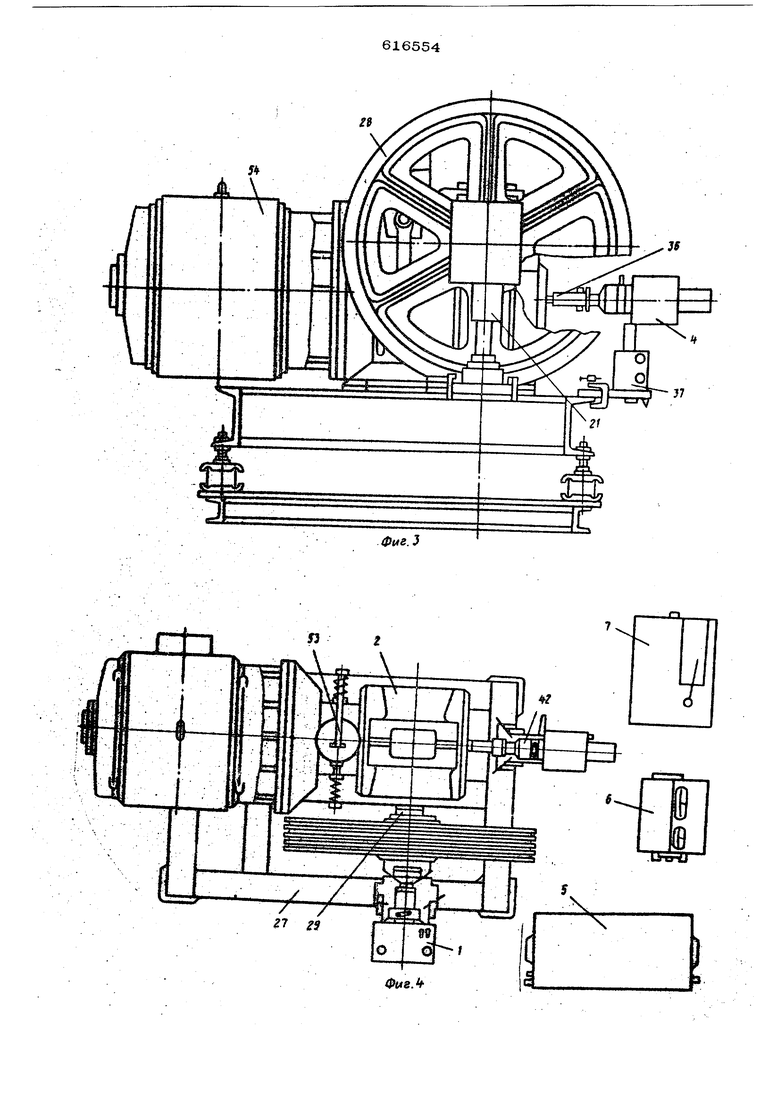
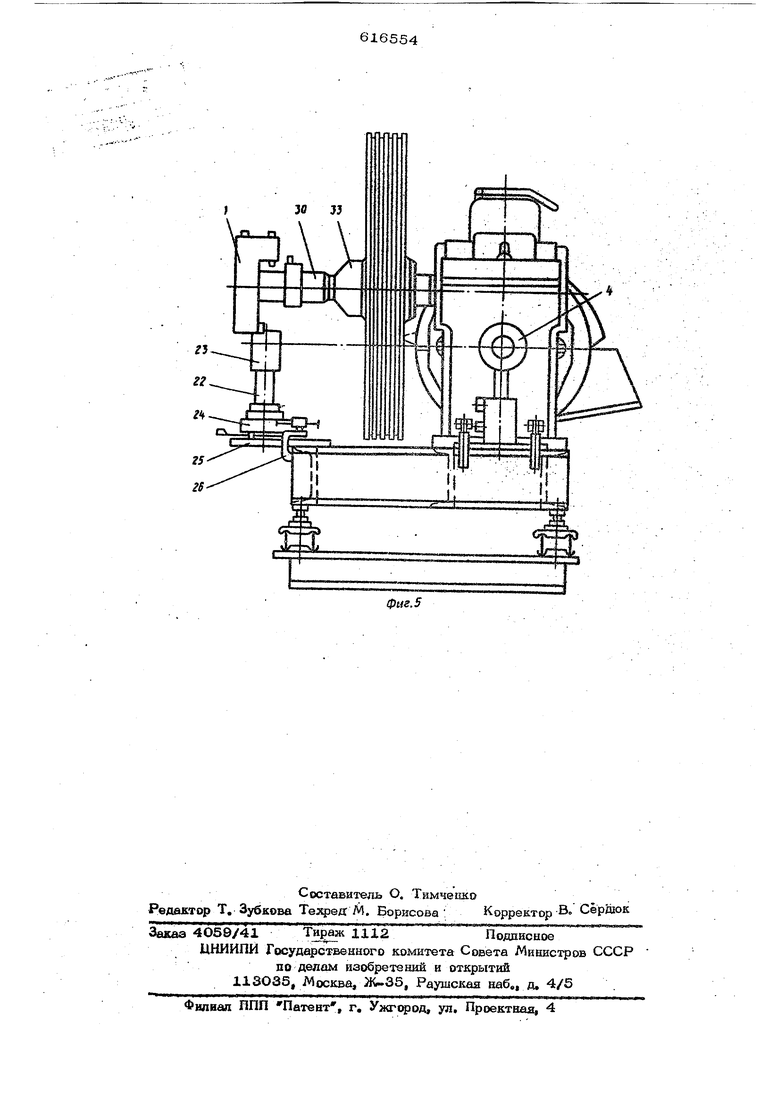
(54) УСТРОЙСТВО ДЛЯ ИСПЫТАНИЯ РЕДУКТОРА ПРОВОДА ЛИФТА Цель изобретения - ускорение процеоса испытаний, а также повышение точност и надежности путем обеспечения стабил1:гности метрологических характеристик. Это достигаетса тем, что устройство снабжено пылевлагонепроницаемым корпусом в котором устаноБлен преобразователь враиюния тихоходного вала редуктора, например синуо-косинусный вращающийся трансф(Ч матор, пылевлагонепроница&мым корпусом, в котором установлен преобразователь вращения быстроходного вала редуктора, содержаишй, например, синуо косинус1{ый врашаюишйся трансфо{ матор, щтативом корпуса преобразоват ля вращения тихоходного вала, выполненным с числом степеней свободы, большим четырех, и установпенным на привода, штативом корпуса преобразователя быстроходного вала, выполненным с чиолом степеней свободы, болзшим четырех, и устанвеленным на раме привода, самоцентрирующимся стыковочным узлсни, установленным на входном валу образцовойфрикшюнной передачи и взаимодействующим с концом тихотсодного вала редуктора, самоцентрирующимся стыковочным узлом, установленным на валу преобразователя вращения быстроходнс о вала и взаимодействующим с концом быстроходного вала, корректором электрической погрешноо ти, содержащим ось, соединенную с осью преобразователя вращения быстроходного вала, а система измерения рассогласования снабжена блоком питания, пультом управления, в котором смонтированы со&диненные последовательно блок формирова ния калибровочных импульсов, блок масштабирования разностного сигнала преобразователей вращения, блок усиления и преобразования разностного сигнала, блок показывающих приборов визуального отсч& та, выносным блоком регистрации, релёйн1 -коммутационным блоком управления ре жимами работы пульта и блока питания, в котором установлены силовые алектр ческие агрегаты и силсжые элементы коь мутации электродвигателя и тормоза иопытуемого редуктора привода лифта, npi чем образцовая 4 икционная передача сна жена качающейся подяружиненнс рычажной подвеской ведомого фрикциона, попненной с электромагнитным расцепит& лем (| икционного зацепления, а выход преобразователя вращения тихоходного в ла соединен с выходом преобразователя вращения быстроходного вала, выход корректора электрической погрешности соеКроме того, самоустанавливающийся стыковочный узел может содержать две упругие компенсационные муфты, стыковочную чашку, базируемую по торцу вала редуктора и выполненную с подпружиненным конусом, причем стыковочная чашка связана с валом преобразователя вращения посредством упругих компенсационных муфт. На фиг, 1 приведена структурная сх&ма предлагаемого устройства; на фиг, 2 - кинематическая схема устройства{ на фиг. 3 показаны преобразователи вращения быстроходного и тихоходного валов; на фиг, 4 - то же, вид в плане с указанием расположения блоков устройства; на фиг, 5то же, вид сбоку. Предлагаемое устройство состоит из преобразователя вращения 1, тихоходного вала редуктора 2, привода 3, преобразователя вращения 4 быстроходного вала редуктора 2, системы измерения рассогласования, содержаиюй блок питания 5, переносный пульт управления 6 с выносным блоком 7 регистрирующих приборов, В закрытом коробчатом корпусе 8 преобразователя вращения 1 тихоходного вала смонтирована образцовая повьлшающая фрикционная передача 9, состояашя из двух дисков: бопьшсяо по диаметру ведуи его диска 10 и ведомого фрикционнся о диска 11, Передаточное отнощение дисков Ю и 11 обратно передаточному числу зубчатой передачи 12 испытуемого редуктора 2, Веду щий диск 10 посажен на. входной вал 13 образцовой 4 икдионн(й передачи, который установлен в прецизионной подшипниковой опоре 14, закрепленной в корпусе 8, а ведомый фрикционный диск 11 с выхо; ным валом 15 и подшипниковым узлом 16 смонтировав на шарнирно прикрепленной к корпусу 8 сбалансированной качающей ся рычажной подвеске 17 и поджат к ведущему диску 10 с помощью пружины с регулируемым посредством винта 18 натягом. Подвеска 17 соединена со щтоком плунжерного электромагнита 19, который является расцепителем фрикционных дисков 10 и 11, На выходном валу 15 установлен первый аналоговый аиектричеокий измерительный преобразователь 2О угла пов(ота ведомого фрикционного диока 11 в электрический сигнал, В качес ве измерительного преобразователя 20 может быть использован, например, сищгркосинусный вращающийся трансформатор. Корпус 8 установлен на съемном штативе 21 с пятью фиксируемыми степенями свосоединенной с корпусом 8. Стойка 22 укреплена посредством шаровой опоры 24 на основании штатива 25, которое посредством струбцины 26 прикреплено к раме 27 привода 3 напротив канатовддущего шкива 28, которым оканчивается тихоходный вал .29 испытуемого редукт{ ра 2. Вал 13 со стороны, противополо} ной ведущему диску 10, имеет стыковочный узел ЗО, выполненю в виде соед нительНогЬ валика 31 с двумя гомокине:- матическими шарнирами 32, один из к.о торых связан с валом 13, а другой - с поджатой стыковочной чашкой 33, имеюще подпружиненный центрирующий конус 34, к торцу ступицы 35 канатоведущего шкив 28, : .
Преобразователь вращения 4 установлен соосно с быстроходным валом 3& редуктора 2 посредством второго пят степенного штатива 37, прИ1фаш1еннога к раме 27ч привода 3. В цилищфическом за 1ФЫТОМ ксч пусе38 преобразователя 4 смонтирован вал 39, на кот(ом с одной сторсжы закреплен aTOpcdi аналсгстый
измерительный преобразователь 4О угла поворота быстроходного вала 36и ивдукционный к{фректор 41 для компенсаг ции погрешности измерительных преобра зователей ,2О и 4О, а с стороны стыко очш 1й узел 42, стыково 1к иая чашка 43 колкого поджата к торцу ступицы 44 маховика 45, установленно го на валу 36 редуктора 2, Кс ректор 41 состоит из двух профилированных д( 46 из магнитно-мягкого материала, закрепленных на валу 39, к двух индувционшях головОк 47 с магватопровс с «, имеющим зазор, в котором распопогоются периферийные части дисков 46, Преобрее зсюатели 2О н 4О и noppeta-op 41 соединены между собой последователый и выход корректора 41 подключен к вхоч ду расположенно в пульте управления 6 цепи электронных блоков для вания и измерения разностного сигнала преобразователей 2О и 4О, состоящей из соединенных последтаютельно блока 48 масштабирования, .блока 49 формирования калибровочных импульсов, блока 5О ус ления и преобразования разноетного сигнала из переменного тока в постоянный, блока 51 аналоговых стрелочных показь веющих приборов и вынЪсного блока 7 ре гистрирующих приборов, например, в вида светолучевогр осциллографа или быстродействующего самописца. Кроме блоков 48 -i 51 в пульте управления 6 размеще релейнокоммутационный блок 52 управления оежимами оаботы пульта плуижвового электромагнита 19, Релейн1 -коммут ционный блок 52 соединен также с расположенными в отдельном блоке питания 5 силовыми электрическими агрегатами управления работой двигателя 53 и тормоза 54 привода 3, Агрегаты в виде контакторов, реле, пускателей и выпряК ительного усрройства схемно и конструктивно объединевы в одном силовом блоке 55, Кроме силового блока 55 агрегатов управления работой привода, в блоке питания 5 раэмещена преобразовательная станция 56, включающая не менее восьми различньис преобразователей опорных и питающих напряжений, котсфые через релейи1 -кок мутационный блок 52 подключены к изм рительным преобразователям 2О, 40 и блокам 48 - 51, а также непосредстве но к силовому блоку 55,
Устройство работает следующим образом. Штатив 21 с преобразователем вр вшния 1 укрепляется посредством стру&цин 26 на раме 27 {фивода напротив торца тихохооного вала 29 испытуемого р&дуктсфа 2, Затем путем смешения обоймы 23 и пов(фота стойкя 22 в опоре 24 корпус 8 выставляется и фиксируется такь: чтобы j центрирующий конус 34 вощел в центровое отверстие тихоходного вала 29 испытуемого редуктора 2, а ст1 ковочная чашка 33 была плотно прижата либо к торцу тихоходного вала 29 ( в первом варианте испопцения), либо к торцу ступицы 35 канатоведущего шкива 28 (во втором варианте исаслненйя стыко&о)ного узла), В этом положеюяи геометр ческне оси входного вал 13 образцовой фрикционной передачи 9 щ тихоходного вала 29 редуктсфа 2 сюпадают с необходимой точностью, причем тихоходшой вал 29 рерукторл 2 и веду ищи фрикционный диск 1О образцовой передачи оказываются кинематически соединевными посредс -вом чешки 33 и стыковочного узла 30, Влегояе я надвч11ю карданного валика 31 с шарнирами 32, угоп поворота тихоходного вала 29 передается без искажений ведущему икционыому диску 1О даже при HeKOTf OM весовпаде и осей вала 13 и вала 29, котфое {фактически всегда имеет место в пределах допустимых погрешностей при установке и выставлении преобразователя 1.
Аналогичным образом устанавливается на раме 27 привода 3 преобразователь 4 вращения быстроходного вала. Таким сбразом, штативы 21 н 37 . и стыковочные узлы ЗО и 42 обеспечивают оперативный монтаж преобразователей вращения 1 и 4, автоматическое совмешеннв осей валов 13 29, 36 и 39, а также кинематически жесткую связь между ними без применения каких-либо дополнительных контрольных приспособлений и приборов. Указанный мо таж и стыковка с валами испытуемого редуктора 2 преобразователей вращения 1 и.4 может осуществляться как в за- . водских условиях, например, ,в цехе на линии сборки приводов или на ис пытательном нагрузочном стенде, стенде обкатки и приработки редуктора, через которые проходят все выпускаемые заводо редуктора, так и в эксплуатационных усло виях на приводе работаюиюго лифта. После монтажа и стыковки с редуктором преобразователи вращения 1 и 4, пульт упра ления 6, блок питания 5, блок 7 регистри рующих приборов, двигатель 53 и тормоз 54 привода 3 соединяются соответствующими электрическими кабелями и таким образом объединяются в замкнутую электромеханическую систему привод - устрЫ1ство для испытания привода. Перед началом испытания измерительные преобра зователи углов 20 и 40 находятся в произвольном, рассогласованном попо ®нии, и их разностный сигнал, поступающий на вход пульта управления 6, отличе от нуля. Для проведения испытания необходимо, чтобы в исходном положении пере началом испытаний преобразователи 20 и 40 были согласованы, т. е, их роторы, связанные соответственно с валом 15 и 39, находились в таком положении, при котором разностный сигнал преобразователей бьо1 бы равен нулю. Соглассованное положение преобразователей 20 и.40 можно получить, поворачивая ротор одного из них, например, вращая вал 39 преобразователя 4О быстроходного вала. Эта операция осуществляется в несколько этапов. Сначала с реяейно-коммутационного блока 52 на электромагнит 19 и одновременно на электромагнит тормоза 54 привода подается сигнал. При этом быстр ходный вал 36 редуктора 2 растормаживается и может вращаться вручную посре ством маховика 45, который на лифтовых приводах служит для ручного передви жания кабины, а плунжер электромагнита 19 поворачивает подвеску 17, в результате чего ведоз #ый фрикционный диск 11 выходит из зацепления -с ведущим диском 10 и остается все время неподвижиым. Далее быстроходный вал 36 редуктора 2, а вместе с ним и вал 39, поворачивают в пределах одного оборота на угол. ПРИ котором преобразователь 4О преобразователем 20. Процесс согласс вания контролируется по показаниям блока 51 стрелочных приборов, которые в согласованном положении принимают нуевые значения. Затем через релейно- коммутационный блок 52 выключают электромагнит 19, и ведомый фрикционный диск 11 пружиной и винтом 1Ь ПОДЖИМ&ется к ведущему диску Ю. В этом исходном состоянии зубчатая передача 12 редуктора 2 и образцовая фрикционная передача 9 соединены последовательно и представляют с обой разомкнутую кинематическую цепь, на входе которой устано&лен измерительный преобразователь 40 угла поворота, а на выходе - преобразователь 20, В силу того, что передаточное отнощение образцовой 4$)икционн(й передачи 9 обратно передаточному числу передачи 12, теоретический коэффвциент передачи указанной цепи равен единице. При испытании редуктора с блока 52 подается сигнал на реле и контакторы cfrлового блока 55, которые включают двигатель 53 привода и обеспечивают выбранное направление вращения двигателя и бы роходко о вала 36 редуктора 2. Одновременно с ними вращается тихоходный вал 29, ведущий Ю и ведсвиый 11фрикционные дцски, причем в случаеj если в кинематике передачи редуктора нет погрешностей против нормы, т. е. по качеству изготовления и работы под нагрузкой передача близка к идеальной, роторы измерительных преобразрвателей 2О и 40 вращаются синхронно и их разностный сигнал равен нулю. В случае же, когда изготовление элемент-ов передачи 12или сборка редуктора осуществлены некачественно с недопустимыми отклонениями от требуемой точности, а также при выработке зацепления, износе, или люфтах подщипНИКОВ, несоосности двигателя 53 и быстроходного вала 36, при угловых вибрациях и неравномерности вращения канатоведущего щкива 2Ь, которые возникают при низком КПД редуктора, пла&ность работы передачи 12 нарущается, в ней появляется кинематическая погрей ность, которая приводит к рассогласованию в углах поворота измери ельиых првобр зоватепей 2О и 4О. Величина этого угла ршжоглвсованвя пропорциовальна величине кинематической norpemaocfи %ёредачн 12, она комплексно характеризует степень ТОЧНОСТИ, качество сборки или степень взноса редуктора 2 н.является непрерыьн(й функцией угле® поы)рота как входного (быстроходного))так и выходаого (тиВ результате рассогласования в углах поворота измерительных преобразователей 20 и 4О в их цепи возникает разностный сигнал, который, кроме основной составляюиюй, пропорциональной кинематической погрешности передачи 12, содержит сийтематйческувэ циклическую ошибку, порождаемую погрешностями в иэ отовпевии как самых преобразователей2О и 40, так и в образцовой 4 икционной па редаче 9. Эта ошибка носит знакоперемен вый характер в пределах полного оборота преобразехвателей 2О и 4О, зависит от направления вращения и повторяется рри каждом последующем обороте валов 15. и 39 в их синхронном вращении. Поскотьку угол рассогл юоввния преобразшштелеА 20 и 4О при испытании оказывается вес1 ма везначнте иьиым и не превышает обычн нескольких сотых радиана, указанная систематическая ошибка может искажать результаты1 испытаний. Чтобы этого не происходило, разностный сигнал преобразователей 2О и 4О суммируется с сигналом коррект(фа 41, который вырабатьь Бается в индукционных головках 47 при вращении профилирсданных дисков 46 и имеет амплитуду, равную по величине сио тематическЫ ошибке, а по знаку противоположен ей, причем в зависимости от направления врашения преобразователей используется сигнал лишь одной (соответс вующей) годоэкн 47. Таким образом,: на вход пульта упра&ления 6 поступает корректированный сигнал, который в блоке 48 масштабируется с необходимым для дальнейшей обработки коэффициентом, а в блоке 49 на него накладьюаются калибров1Очные импульсы для облегчения дальнейшей обрявботки гра4шческой записи результатов измерений В блоке 50 сигнал усиливается и с помощью фазового детектс ш преобразуется из переменного тока в сигнал постоянного тока соответствукноей амплитуды и nf лярности. После преобразовавия в блоке 50 он поступает в блсж 51 стрелочных приборов, из показаний которых по амплитуде, знаку, спектральному составу в характеру изменения с.игнала определяются величина циклической и кинематической погрешноств передачи 12 жгпытуемого редуктора 2, боковой зазор в зацеплении, характер пересопряжевиа эпемеатов пере- дачв 12, степень взноса и т. д. т, е, производится оценка состоявия редуктора в качества его работы при различных СКОРОСТЯХ, нагрузках в ваправлевии вра- . Документирование результатов испытаний в виде кинематограмм осуществляет, ся блоком 7 путем записи аналстового сигнала рассогласования преобразователей 20 и 4О. При необходимости детального исследования дефекторов кинематике редуктора на различныхучастках сопрягаемых аяементов передачи 12, например, дефектов в зацеплении наиболее изношенных зубьев червячного колеса с червяксм, быстроходный вал 36 поворачивается в пределах нескольких обортов вручную, и благодаря использованию аналоговых измерительных преобразователей, показ нвя которых 1ю зависят от вращения, получают кинематограмму nepecfvпряжения отдельного зуба в увеличенном масштабе. Техническая эффективность устрЫ1ства заключается в следующем: использование раздельных преобразователей вращения, устанавливаемых на входе и выходе испььтуемого редуктора и связанных между собсй только электрическим , также отсутствие непосредственн механическЕЛ связи между входом испытуем1Л зубчаrvA передачи и вь{ходрм образцовой фрлкционной передачи, с которЫ1 зубчатая перадача сравнивается, существенно повь шает надежность работы устройства и значительно упрощает монтаж и эксплуатацию. Кроме того, благодаря применению специальной конструкции стыковочных элементов и использованию пятистепеиного штатива при установке преобразователей врашеЬия осуществляется автоматическое базирование, выставление и рование их пространственного распалож&ния с необходимой точностью в течение (юскольких минут. Размещение образцовой ({фикционной передачи в закрытом ксртусе преобразователя врашения тихоходного вала, применение работающих в режиме электрической дистанцноввой передачи угла расссяласованпя прецизионных измерительных преобразователей в виде синускосинусных вращающихся трансформаторов в совокупвостн с корректором их системат1 ческвх ошибок, использование гомокинетвческвх шарниров в .и передачи аШ9 кия тнхоходнсго в бьтстроходвси о валов от вспытуемого редуктора к преобразователям врашевия обеспечивает высокую то кость и стабильность метрологических характеристик устройства, устойчввость его к внешввм воздействиям (ударам,, грнзв, маслу к т. д.), а также практвческв потную нечувствительность к перекосам в см ных органов относительно осей валов редуктора. Применение качающейся подвески ведом га офрикционного диска с эпектромагнитным расцепитепем в совокупности с релейно-коммутацконной системой управ ления работой устройства и привода, блсхками масштабирования калибровки, визуал ного отсчета и блоком регистрирующей Аппаратуры обеспечивает простоту настрой ки, большую оперативность при подготов ке, а также при проведении испытаний к анализе результатов. Формула изоб ре тения Устройство для испытания редуктора привода лифта, содержащее повышающую образцовую фрикционную передачу с передаточным отношением, обратным передаточному числу испытуемого редуктора, снабженного электродвигателем с тормозо и установленного на раме, и систему измерения рассогласования во вращении образцовой фрикционной передачи и зубчатой передачи испытуемого редуктора, о т л н чающееся тем, что, с целью ускорения процесса испытаний, а также повьаиения точности и надежности путем обеспечения стабильчости метрологических характеристик , ойо снаблйэно пьшеБлаго«епроницаем|,1М корпусом, в котором установлен преобразователь вращения тихоходного вал.а редуктора, н&пример синус-косинусный вращающийся трансформатор, пылевпагонепроницаемым корпусом, в котором установлен, преобразователь вращения быстроходного вала редуктора, содержащий, например, синускосинусный вращающийся трансформатор, штативом корпуса преобр.азователя вращения тихоходного вала, выполненным с чис лом степеней свободы, большим четырех, и устаноаленным на раме привода, штатавом корпуса преобразователя быстроходного вала, выполненным с числом степене свободы, бопьшим четырех, и установлен)ным на раме ривода, самоцентрирующемся стыковочным узлом, установленным на входном образцов фрикционной пере дачи и взаимодействующим с онцом тихоходного вала редуктора, |с оцент0ирук шимся стыковочным узлом, установленным на валу преобразователя вращения быстроходного вала и взаимодействующим с дом быстроходного вала, корректором эпе&трической псо решности, содержаишм ось, соединенную с осью преобразователя врат ния быстроходного вала, а система iiaJMepeния рассогласования снабжена блоком пнта ния, пультам управления, в котором гированы соедвневные последовательно (блок формирования калибровочных вмяулЬ сов, блок масшт ирования разностного сигнала преобразователей вращения, блсж усиления и преобразовавия разностнся о сигнала, блок показывающих прябс ов вазуальнсго отсчета, выносным блсжом регистрации, релейно-коммутаиионным блоком управления режимами работы пульта и блока питания, в котором установлены силовые злектрические агрегаты и силовые элементы коммутации электродвигателя и тормоза испытуемого редукюра привода лифта, причем образцовая фрикционная передача снабжена качающейся подпружиненной рычажной подвеской ведомого 4ФНК|циона, выпопненнсй с электромагнитным расцепителем фрикционного зацепления, а выход преобразователя вращения тихоходного вала соеданен с выходом преобразователя вращения быстроходна о вала, выход корректора эпектрической пс решности соединен со входом системы измерения рассогласования. 2. Устройство для испытания редуктора привода лифта по ц. 1, о. т л и ч а е е с я тем, что самоустанавливаюший-ся стыковочный узел содержит две упругие к{ мпеж:ационные муфты, стыковочную чашку, базируемую по торцу вала редуктора и вьшопненну1Ь с подпружиненным кону сом, причем стыковочная чашка связана с валом преобразователя вращения посре ством упругих компевсацнонных муфт. Источники информации, прннатью во В1шмашш при экспертизе: 1. Авторск:ое свидетельство CCXiJP Sfe 274394, кл. В 7/28, 2О.О2.в9. 2.Auiofб арЫс rectSjHdtffd oi m ufdf kobbmrf шогсйшеа, Mach rti6iW00,Meaf I W 0 If
| название | год | авторы | номер документа |
|---|---|---|---|
| Стенд для испытания редукторов с коаксиальными валами | 1985 |
|
SU1328703A2 |
| ГЕНЕРАТОР-МУЛЬТИПЛИКАТОР ДЛЯ ПИТАНИЯ ЗАБОЙНОЙ ТЕЛЕМЕТРИЧЕСКОЙ СИСТЕМЫ | 2002 |
|
RU2215139C1 |
| Стенд для испытания редукторов с коаксиальными валами | 1985 |
|
SU1295257A1 |
| Многоточный нагружатель к стендам замкнутого контура | 1978 |
|
SU1136056A1 |
| ЭЛЕКТРОПРИВОД ВРАЩАТЕЛЬНОГО ДВИЖЕНИЯ | 2008 |
|
RU2376513C1 |
| СТЕНД ДЛЯ ВЫТЯЖКИ РЕМНЕЙ ДВУХ ПЕРЕДАЧ ПО СХЕМЕ ЗАМКНУТОГО КОНТУРА | 2015 |
|
RU2620759C1 |
| Прокатная клеть с многовалковым калибром | 1978 |
|
SU876217A2 |
| АВТОМАТИЧЕСКИЙ СТАЦИОНАРНЫЙ БУРОВОЙ КЛЮЧ | 1998 |
|
RU2143051C1 |
| МЕХАНИЗМ ПОВОРОТА СТОЙКИ | 2001 |
|
RU2221736C2 |
| Привод вертикальной роликовой мельницы | 1983 |
|
SU1135490A1 |