(54) ПЬЕЗОТРАЯСФОРМАТОР
| название | год | авторы | номер документа |
|---|---|---|---|
| Пьезоэлектрический трансформатор | 1979 |
|
SU851787A1 |
| ПЬЕЗОТРАНСФОРМАТОР | 1973 |
|
SU373902A1 |
| Электромеханический преобразователь | 1981 |
|
SU1068176A1 |
| Ультразвуковой преобразовательРАдиАльНыХ КОлЕбАНий | 1979 |
|
SU837423A1 |
| Пьезоэлектрический трансформатор | 1977 |
|
SU620037A1 |
| Пьезоэлектрический трансформатор напряжения | 1978 |
|
SU771907A1 |
| ВИБРОДВИГАТЕЛЬ | 1991 |
|
RU2050038C1 |
| Пьехотрансформатор | 1968 |
|
SU475048A1 |
| ШИРОКОПОЛОСНЫЙ ПРЕОБРАЗОВАТЕЛЬ | 1984 |
|
SU1840749A1 |
| Пьезоэлектрический трансформатор | 1972 |
|
SU476832A1 |
Изобретение относится к низкочастотным изгибным пьезотрансформаторам и может использоваться для получения высоких напряжений при питании, например, от сети 220Ь 50 Гц, необходимых для зажигания газоразрядных приборов, япя источников высоковольтного смещения и. т.п.
Известен пьезотрансформатор, имеющий консольно закрепленный на опоре четвертьволновый пьезоэлемент.
Однако эффективная работа пьезотрансформатора при консольном закреплений может быть обеспечена только в том случае, если масса опоры велика и волновое сопротивление материала опоры много больше волнового сопротивления пьезокерамики, а такому требованию удовлетворяют только лишь некоторые металлы. Все это усложняет применение таких трансформаторов.
Цель изобретения - уменьшение габаритов и повшиение коэффициента трансформации .
Это достигается тем, что к опоре параллельно указанному пьезоэлементу прикреплен пассивный четвертьволновый элемент, например, металлический. .
Каждый четвертьволновый элемент выполнен изогнутым, например,W -образной формы.
Каждый четвертьволновый элемент снабжен дополнительным грузом с регулируемым моментом инерции.
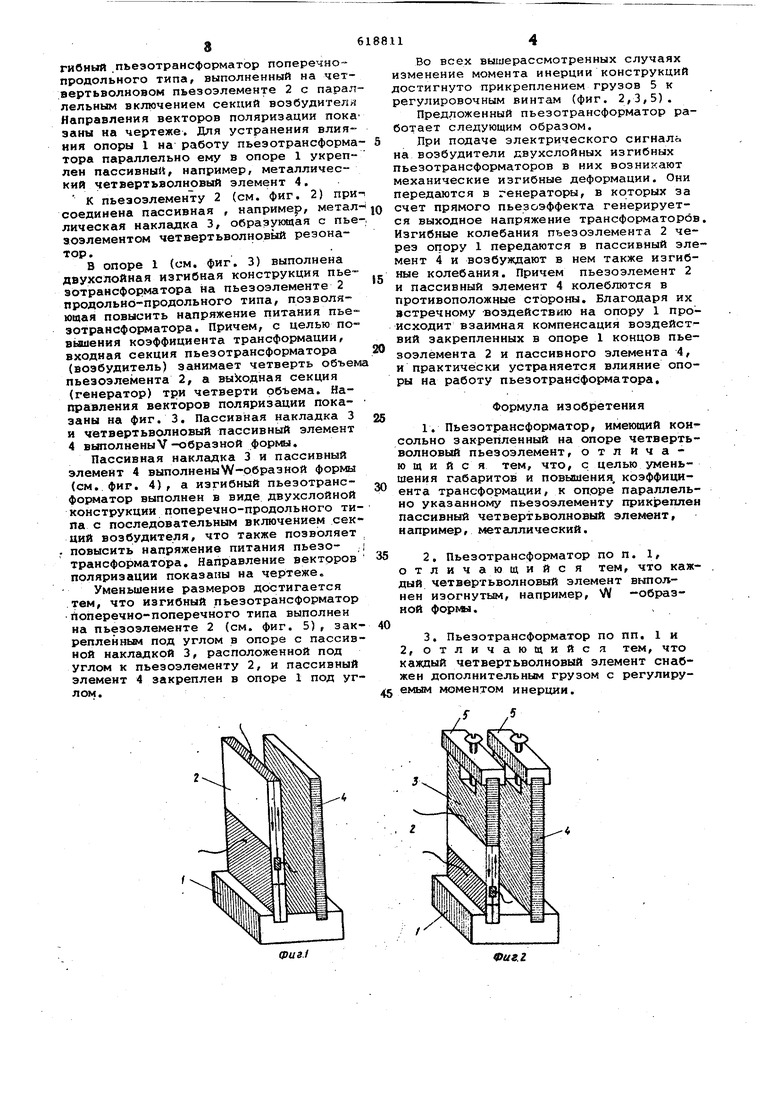
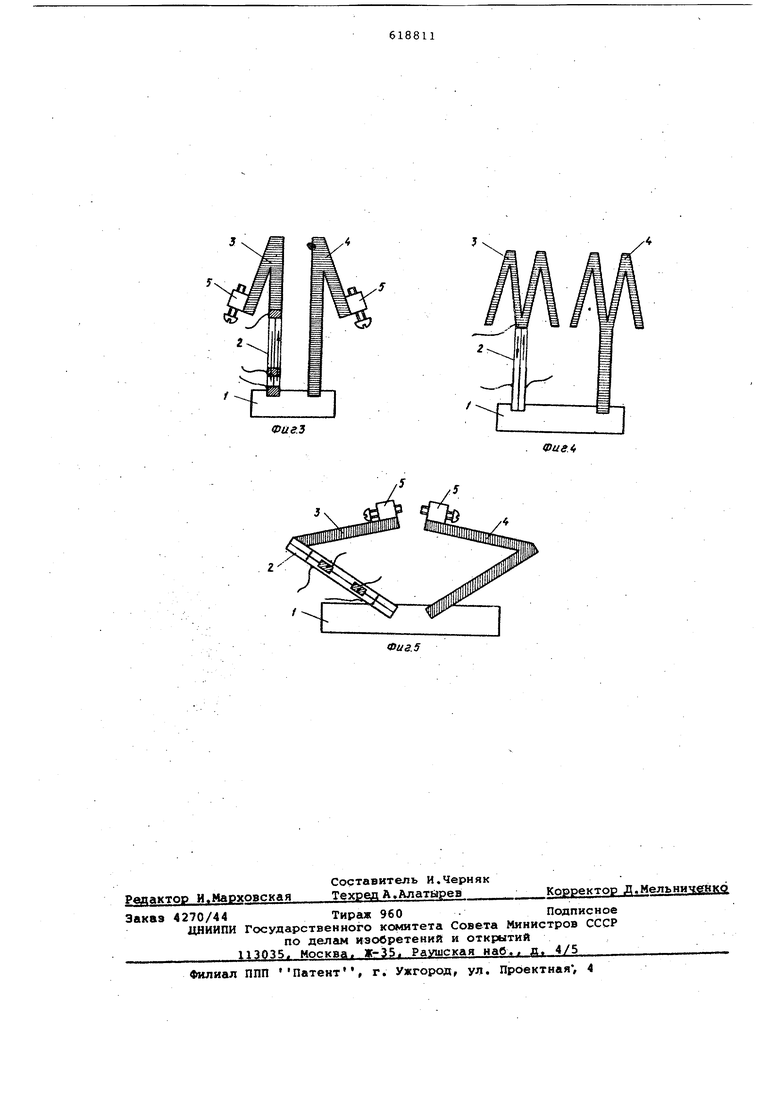
На фиг. 1 схематически изображен пьезотрансформатор с четвертьволновыми пьёзоэлементом и пассивным элементом; на фиг. 2 - пьезотрансформатор с четвертьволновым пассивным элементом и пьёзоэлементом с пассивной накладкой; на фиг. 3 - пьезотрансформатор, у которого четвертьволновые элементы выполнены V -образной формы; на фиг. 4 - пьезотрансформатор cW -образными четвертьволновыми элементами; на фиг. 5 - пьезотрансформатор с четвертьволновыми пассивным элементом и пьёзоэлементом, закрепленными под углом в опоре.
Пьезотрансформатор состоит из опоры 1, пьезоэлемента 2, пассивной накладки 3, пассивного элемента 4 и грузов 5 с регулировочными винтами для регулировки момента инерции.
В опоре 1 (см. фиг. 1), выполненной в виде небольшого бруска, наприме из металла, закреплен двухслойный изгибный .пьеэотрансформатор поперечнопродольного типа, выполненный на четвертьволновом пьезоэлементе 2 с парал лельным включением секций возбудителя Направления векторов поляризации пока эаны на чертеже. Для устранения влияния опоры 1 на работу пьеэотрансформа тора параллельно ему в опоре 1 укреплен пассивный, например, металлический четвертьволновый элемент 4. К пьеэоэлементу 2 (см. фиг. 2) при соединена пассивная , например, метал лическая накладка 3, обраэукяцая с пье зоэлементом четвертьволновый резонатор. В опоре 1 (см. фиг. 3) выполнена двухслойная изгибная конструкция пьезотрансформатора на пьезоэлементе 2 продольно-продольного типа, позволяющая повысить напряжение питания пьезотрансфор 1атора. Причем, с целью повьоыения коэффициента трансформации, входная секция пьезотрансформатора (возбудитель) занимает четверть объем пьезоэлемента 2, а выkoднaя секция (генератор) три четверти объема. Направления векторов поляризации показаны на фиг. 3. Пассивная накладка 3 и четвертьволновый пассивный элемент 4 выполненыV-образной формы. Пассивная накладка 3 и пассивный элемент 4 выпoлнeныW-oбpaзнoй формы (см. фиг. 4), а изгибный пьезотрансформатор выполнен в виде двухслойной конструкции поперечно-продольного типа с последовательным включением сек ций возбудителя, что также позволяет повысить напряжение питания пьезотрансформатора. Направление векторов поляризации показаны на чертеже. Уменьшение размеров достигается тем, что изгибный пьезотрансформатор поперечно-поперечного типа выполнен на пьезоэлементе 2 (см. фиг. 5), закрепленнь№1 под углом в опоре с пассивной накладкой 3, расположенной под углом к пьезоэлементу 2, и пассивный элемент 4 закреплен в опоре 1 под углом. Во всех вышерассмотренных случаях изменение момента инерции конструкций достигнуто прикреплением грузов 5 к регулировочным винтам (фиг. 2,3,5). Предложенный пьезотрансформатор работает следующим образом. Лри подаче электрического сигналь на возбудители двухслойных изгибных пьезотрансформаторов в них возникают механические изгибные деформации. Они передаются в генераторы, в которых за счет прямого пьез&эффекта генерируется выходное напряжение трансформаторов. Изгибные колебания пьезоэлемента 2 через опору 1 передаются в пассивный элемент 4 и возбуждают в нем также изгибные колебания. Причем пьезоэлемент 2 и пассивный элемент 4 колеблются в противоположные стороны. Благодаря их встречному воздействию на опору 1 происходит взаимная компенсация воздействий закрепленных в опоре 1 концов пьезоэлемента 2 и пассивного элемента 4, и практически устраняется влияние опоры На работу пьезотрансформатора. Формула изобретения 1.Пьезотрансформатор, имеющий коисольно закрепленный на опоре четвертьволновый пьезоэлемент, отличающийся тем, что, с целью уменьшения габаритов и повышения, коэффициента трансформации, к опоре параллельно указанному пьезоэлементу прикреплен пассивный четвертьволновый элемент, например, металлический. 2.Пьезотрансформатор по п. 1, отличающийся тем, что каж- , дый четвертьволновый элемент выполнен изогнутым, например, W -образной формл. 3.Пьезотрансформатор по пп. 1 и 2, отличающийся тем, что каждый четвертьволновый элемент снабжен дополнительным грузом с регулируемым моментом инерции.
Фиг.
Фиг.1
Фиг.Ъ
