Изобретение относится к электротехнике, в частности к электрическим двигателям, использующим электромеханические преобразователи, и может быть использовано при разработке реверсивных вибродвигателей.
Известен реверсивный вибродвигатель, содержащий ротор, пьезопреобразователь и ступенчатый концентратор продольно-крутильных колебаний, в котором установлен дисковый фланец, представляющий собой резонатор крутильных колебаний, расположенный на ступени концентратора [1]
Недостатком этого устройства является малая амплитуда смещений и, как следствие, низкий вращательный момент.
Наиболее близким по технической сущности и достигаемому положительному эффекту к заявляемому является вибродвигатель, содержащий концентратор продольно-крутильных колебаний в виде ступенчатого цилиндра с широкой и узкой частями, ротор, стержневые резонаторы продольных колебаний, закрепленные наклонно на боковой поверхности широкой части концентратора и вибропреобразователь в виде пьезоэлементов с пассивной накладкой, резонаторы ступенчатые, четвертьволновые [2]
Недостатком известного устройства является высокая крутильная жесткость и, как следствие, низкий коэффициент преобразования колебательных смещений, не высокий вращательный момент ротора. При этом вибродвигатель обладает сравнительно большими габаритами.
Целью изобретения является повышение скорости и момента вращения ротора за счет увеличения амплитуд(ы) продольно-крутильных колебаний концентратора и уменьшение габаритов двигателя.
Поставленная цель достигается тем, что в вибродвигателе, содержащем электромеханический преобразователь, концентратор продольно-крутильных колебаний и контактирующий с ним ротор, электромеханический преобразователь содержит не менее трех горизонтальных ребер жесткости, упруго соединяющих концентратор с верхней накладкой, расположенной коаксиально концентратору и жестко фиксирующей пьезоэлементы на пассивном основании, и торсион, расположенный по продольной оси двигателя, имеющий по крайней мере два стержня и упруго соединяющий концентратор с основанием преобразователя через узел растяжения стержней торсиона, при этом стержни торсиона расположены под углом продольной оси и упруго растянуты на величину
Δ L>A/cos β где Δ L удлинение стержней торсиона;
А амплитуда продольных колебаний концентратора;
β угол между стержнем торсиона и продольной осью.
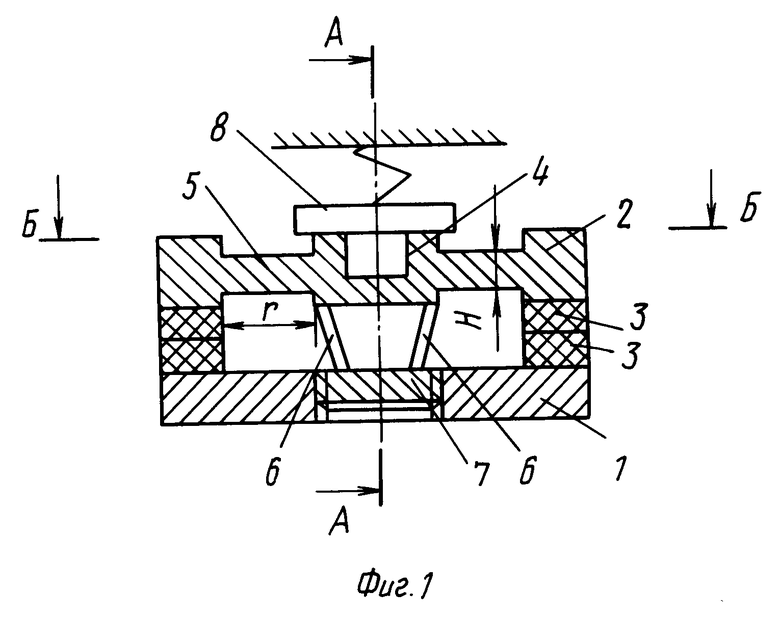
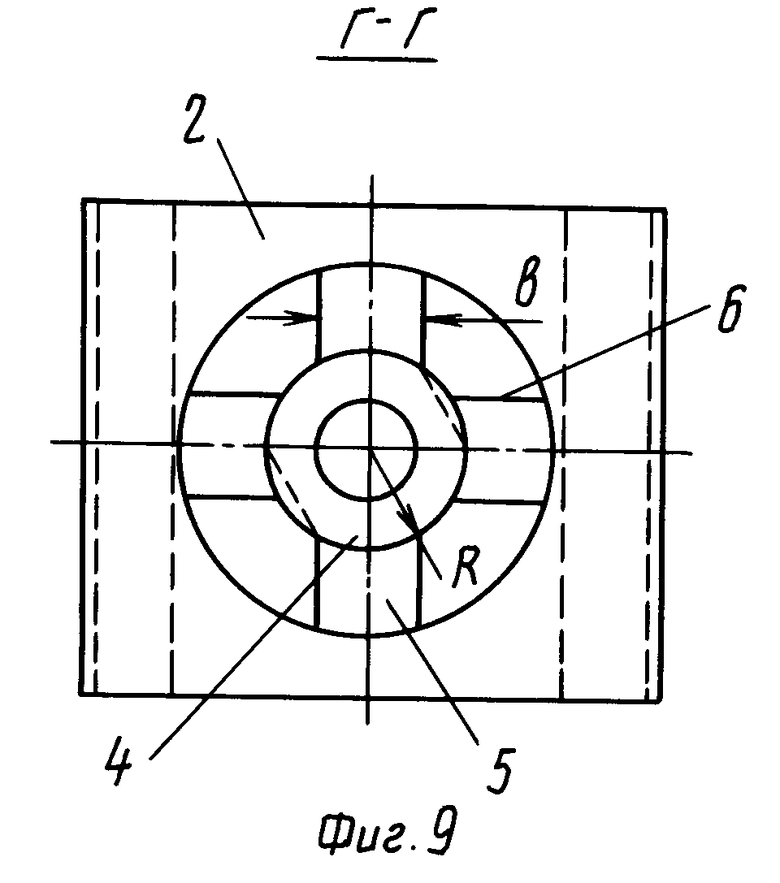
На фиг. 1 показан предлагаемый вибродвигатель с четырьмя ребрами жесткости и с внутренним относительно пьезоэлементов расположением концентратора и торсиона, имеющего два стержня; на фиг. 2 разрез А-А на фиг. 1; на фиг. 3 разрез Б-Б на фиг. 1; на фиг. 4 и 5 действующие силы; на фиг. 6 вибродвигатель с тремя ребрами жесткости и с внешним относительно пьезоэлементов расположением концентратора и торсиона, имеющего четыре стержня; на фиг. 7 разрез В-В на фиг. 6; на фиг. 8 вибродвигатель, испытывающий сдвиговые колебания в горизонтальной плоскости с внутренним расположением торсиона и концентратора; на фиг. 9 разрез Г-Г на фиг. 8.
Вибродвигатель состоит из пассивного основания 1 и верхней накладки 2, форма которой определяется геометрией пьезоэлементов 3, последние жестко закреплены между основанием и накладкой. Концентратор продольно-крутильных колебаний 4 расположен коаксиально верхней накладке и жестко соединен с ее боковой поверхностью ребрами 5 жесткости. Упругая связь концентратора с основанием осуществлена через торсион, имеющий два стержня 6, при помощи узла 7 растяжения стержней торсиона. Ротор 8 упруго поджат к концентратору продольно-крутильных колебаний. Стержни торсиона А-В и С-D (фиг. 4) образуют с продольной осью угол β. В качестве пьезоэлементов использована кольцевая пьезокерамика с продольной поляризацией. Электроды пьезоэлементов подключены к блоку питания двигателя.
Примером одной из возможных реализаций узла 7 является хвостовик с резьбой, концентрический относительно продольной оси двигателя. Наличие в основании 1 ответного отверстия с резьбой позволяет при поворачивании основания в процессе сборки обеспечивать соответствующую величину растяжения стержней торсиона. После получения необходимой упругой деформации стержней хвостовик жестко фиксируется с основанием.
Для эффективной работы преобразователя необходимо, чтобы пьезоэлементы постоянно находились в состоянии сжатия. Это обеспечивается за счет того, что в исходном состоянии стержни торсиона находятся в состоянии упругого растяжения, и величина удлинения стержней составляет ΔL, причем
Δ L>A/cos β где А амплитуда продольных колебаний концентратора, которая за счет жесткости ребер равна амплитуде продольных колебаний керамики, при вычислении Δ L в качестве величины А берется паспортизированная величина максимальной амплитуды продольных колебаний для используемого типа пьезокерамики;
β угол между стержнем торсиона и продольной осью.
Упругое растяжение стержней торсиона осуществляют на операции сборки преобразователя, при этом в каждом из стержней возникает сжимающая сила Fт (фиг. 4): Fт=(ΔL/L)ES (1), где ΔL удлинение стержня;
L начальная длина стержня;
E модуль Юнга;
S площадь сечения стержня.
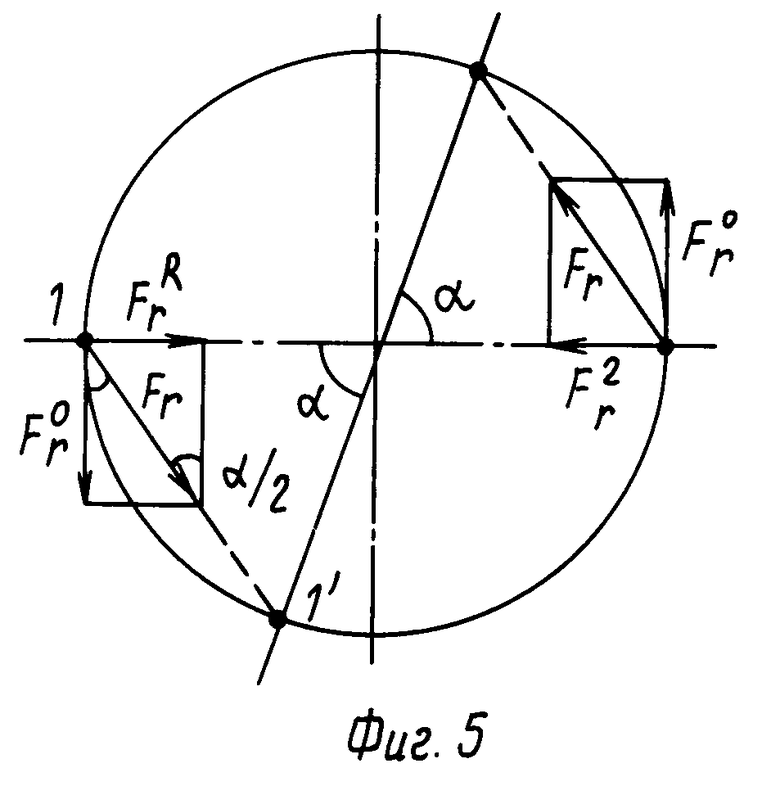
Сила Fт разлагается на вертикальную силу Fв и горизонтальную Fг, в свою очередь Fг разлагается на осевую Foг и радиальную Fr силы. Радиальные силы Fr от двух стержней взаимно компенсируются, а осевые силы Fго образуют пару сил, создающих крутящий момент на концентраторе. Из простых геометрических соображений следует
β arcsin (2R/L)sin( α/2) (2)
Fв= F = Fтcosβ (3)
= Fтcosβ (3)
Frо=Fт(R/L)sinα (4) где R радиус торсиона;
α- угол между осями торсиона.
Пара сил Frо вызывает горизонтальный изгиб ребер жесткости, в результате чего концентратор развернется на угол α.
Рассматривая каждое ребро жесткости как консоль длиной r (фиг. 1), на конце ко- торой действует поперечная сила F=2Fro/n (5), n число ребер, и используя известные формулы для изгиба консоли, получаем выражение для перемещения конца
δr=Fr3/3EIr (6), где r длина ребра жесткости,
Ir момент инерции горизонтального сечения ребра жесткости;
Ir=1/12(rb3), где b ширина ребра жесткости.
Используя (4), (5), (6), получаем:
δr(8Fт/n)(R/L)(r2/Eb3)sinα (7)
С другой стороны δr=2RSin( αI /2) (8), где αI угол разворота концентратора при горизонтальном изгибе ребра жесткости.
Используя (1), (7), (8) и учитывая, что αмалsin
 получаем
получаем
αI=8 ΔLSr2sin α /L2nb3. (9)
По уравнению (9) находим угол разворота концентратора после сборки преобразователя (в исходном состоянии).
Под действием двух сил Fв ребра жесткости испытывают вертикальный прогиб δв
δв= (2Fв/n)(r3/3EIв) (10) где Iв момент инерции вертикального сечения ребра жесткости
Iв=1/12rh3 (11)
Используя (1), (3) и (11) получаем
Sв=(8/n) (Δ L/L)(Sr2/h3)cosβ (12)
Таким образом, в исходном состоянии элементы преобразователя находятся в состоянии упругой деформации, при этом концентратор развернут на угол αI в горизонтальной плоскости и смещен на величину δввдоль вертикальной оси.
Соотношение между вертикальной и горизонтальной изгибной жесткостью соединительных ребер 5 и торсиона 6 определяется типом используемой пьезокерамики: жесткость ребер вдоль оси используемых колебаний пьезокерамики должна быть много больше жесткости торсиона вдоль этой оси, а жесткость соединительных ребер вдоль ортогональной оси должна обеспечивать совпадение резонансных частот колебаний ребер вдоль этой оси и пьезоэлементов.
Вибродвигатель с продольно колеблющейся пьезокерамикой (фиг. 1 и 2) работает следующим образом.
При подаче от блока питания (генератора) переменного напряжения на электроды пьезоэлементов 3 они начинают продольно вибрировать. Вместе с пьезоэлементами начинает продольно вибрировать накладка 2 и жестко связанный с ней концентратор 4. Поскольку вертикальная изгибная жесткость ребер 5 много больше вертикальной жесткости торсиона 6, смещения концентратора вдоль вертикальной оси δв (12) -> 0, амплитуда продольных колебаний концентратора будет практически такой же, как и амплитуда продольных колебаний пьезоэлементов, т. е. вдоль вертикальной оси накладка 2, ребра жесткости 5 и концентратор 4 колеблются как жесткое тело.
Продольно вибрирующий концентратор 4 взаимодействует с торсионом 6, испытывающим начальное растяжение Δ L, возникающие при этом знакопеременные удлинения Δ L' по абсолютной величине не превышают L. В результате сложения Δ L c Δ L' в стержнях торсиона возникают динамические силы Fдт, которые разлагаются на вертикальную Fдв и горизонтальную Fдг составляющие, аналогично статическим силам (фиг. 4 и 5). Высокая вертикальная жесткость соединительных ребер позволяет пренебречь воздействием вертикальных динамических Fдв на продольные колебания концентратора.
Под действием пары горизонтальных динамических сил Fдгконцентратор начинает совершать крутильные колебания.
В результате наложения колебаний концентратор совершает продольно-крутильные колебания, а поскольку горизонтальная жесткость соединительных ребер обеспечивает совпадение резонансных частот колебаний ребер в горизонтальной плоскости с резонансной частотой продольных колебаний пьезоэлементов, концентратор совершает продольно-крутильные колебания с максимальной амплитудой, которые приводят во вращение упруго взаимодействующий с концентратором ротор 8.
В другом варианте выполнения вибродвигателя концентратор и торсион расположены внешне относительно пьезоэлементов фиг. 6 и 7. Такой двигатель работает так же, как и описанный выше (фиг. 1, 2), но за счет значительного увеличения (в 3 и более раз) радиуса торсиона соответственно увеличивается горизонтальная пара сил, воздействующих на концентратор 4, что повышает амплитуду крутильных колебаний и момент вращения ротора.
В вибродвигателе, содержащем в качестве пьезоэлементов сдвиговую пьезокерамику (сдвиг в горизонтальной плоскости) фиг. 8 и 9, горизонтальная изгибная жесткость соединительных ребер намного превышает крутильную жесткость торсиона, а вертикальная жесткость ребер обеспечивает совпадение резонансных частот продольных колебаний ребер и сдвиговых колебаний пьезоэлементов. В этом случае (при сборке преобразователя) при растяжении стержней торсиона на ΔL угол разворота концентратора (9) -> 0, крутильные колебания концентратора осуществляются за счет сдвиговых колебаний пьезоэлементов, а продольные колебания концентратора осуществляются под действием динамических сил торсиона.
На основании изложенного был изготовлен вибродвигатель с внутренним расположением концентратора и торсиона, в качестве пьезоэлементов которого были использованы 2 слоя кольцевой пьезокерамики ЦТС-36 толщиной 0,6 мм с вертикальной поляризацией и собственной резонансной частотой 40 кГц. Двигатель выполнен с четырьмя ребрами жесткости, торсион имеет два стержня. Согласование резонансных частот крутильных колебаний концентратора и продольных колебаний пьезоэлементов осуществлено за счет выбора соответствующих размеров длины r и ширины b ребер жесткости.
Вертикальная изгибная жесткость соединительных ребер примерно в 30 раз превышает горизонтальную изгибную жесткость. Точное согласование резонансных частот осуществляли путем механической растяжки стержней торсиона.
В качестве источника переменного напряжения был использован звуковой генератор ГЗ-109, амплитуда питающего напряжения 30 В.
На частоте 40 кГц получено вращение пассивного ротора с частотой ≈2000 об/мин. Расстройка частоты питающего напряжения нa 2% от значения частоты резонансного пика приводит к реверсивному вращению ротора.
Основное преимущество предлагаемой конструкции по сравнению с прототипом и аналогичными с ним конструкциями, в которых происходит "превращение акустических продольных колебаний в крутильные", состоит в том, что здесь пьезокерамика "развязана" с концентратором продольно-крутильных колебаний ребрами жесткости и торсионом и не влияет на продольно-крутильную жесткость системы, которой определяется амплитуда продольно-крутильных колебаний.
Расчет показывает, что амплитуда крутильных колебаний концентратора в предлагаемой конструкции, при прочих равных условиях (пьезоэлементы, диаметр концентратора, амплитуда переменного напряжения и т.д.) примерно в 100 раз выше, чем у прототипа.
Преобразование колебаний в предлагаемой конструкции осуществляется чисто механическим способом, следовательно, концентратор выполняется пассивным и не является акустическим резонатором, поэтому нет необходимости выполнять его ступенчатым, что позволяет уменьшить габариты двигателя по высоте в 1,5-2 раза.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ПОЛУЧЕНИЯ ПРОДОЛЬНО-КРУТИЛЬНЫХ КОЛЕБАНИЙ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1990 |
|
RU2091974C1 |
| Вибродвигатель | 1986 |
|
SU1501239A1 |
| Вибродвигатель | 1977 |
|
SU794684A1 |
| УСТРОЙСТВО ДЛЯ УЛЬТРАЗВУКОВОЙ ОБРАБОТКИ | 2013 |
|
RU2548344C2 |
| МНОГОКООРДИНАТНЫЙ ПЬЕЗОДВИГАТЕЛЬ | 1999 |
|
RU2166832C1 |
| Вибродвигатель | 1978 |
|
SU805475A1 |
| Ступенчатый концентратор продольно-крутильных колебаний | 1977 |
|
SU625534A1 |
| Однофазный вибродвигатель | 1979 |
|
SU864385A1 |
| АКУСТИЧЕСКИЙ СТЕРЖНЕВОЙ ПРЕОБРАЗОВАТЕЛЬ | 2002 |
|
RU2230615C1 |
| Вибродвигатель | 1976 |
|
SU623241A1 |






Использование: при разработке реверсивных счетчиков. Сущность изобретения: вибродвигатель содержит электромеханический преобразователь в виде пьезоэлементов, закрепленных между пассивным основанием и верхней накладкой, концентратор продольно-крутильных колебаний и контактирующий с ним ротор. Концентратор упруго соединен с верхней накладкой посредством не менее трех соединительных ребер. Концентратор упруго соединен с пассивным основанием посредством торсиона, имеющего по крайней мере два стержня, расположенных под углом к вертикальной оси и растянутых на указанную в описании величину. При этом жесткость соединительных ребер вдоль оси колебаний пьезоэлементов много больше жесткости торсиона вдоль этой оси, а жесткость соединительных ребер вдоль ортогональной оси выбрана из условия совпадения резонансной частоты колебаний соединительных ребер вдоль этой оси с резонансной частотой пьезоэлементов. 9 ил.
ВИБРОДВИГАТЕЛЬ, содержащий электромеханический преобразователь в виде пьезоэлементов, закрепленных между пассивным основанием и верхней накладкой, концентратор продольно-крутильных колебаний и контактирующий с ним ротор, отличающийся тем, что он дополнительно содержит не менее трех соединительных ребер, упруго соединяющих концентратор с верхней накладкой, расположенной коаксиально концентратору, и торсион, расположенный вертикально, имеющий по крайней мере два стержня и упруго соединяющий концентратор с пассивным основанием, стержни торсиона расположены под углом к вертикальной оси и растянуты на величину L, удовлетворяющую соотношению L>A/cosβ, где A амплитуда продольных колебаний концентратора, β угол между стержнем торсиона и вертикальной осью, при этом жесткость соединительных ребер вдоль оси используемых колебаний пьезоэлементов много больше жесткости торсиона вдоль этой оси, а жесткость соединительных ребер вдоль ортогональной оси выбрана из условия совпадения резонансной частоты колебаний соединительных ребер вдоль этой оси с резонансной частотой пьезоэлементов.
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Вибродвигатель | 1986 |
|
SU1501239A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
