(54) ВЫБИРАЮЩИЙ МЕХАНИЗМ ДЛЯ МНОГОКРАТНЫХ КООРДИНАТНЫХ СОЕДИНИТЕЛЕЙ
| название | год | авторы | номер документа |
|---|---|---|---|
| Многократный координатный соединитель | 1959 |
|
SU123570A1 |
| УДЕРЖИВАЮЩИЙ МЕХАНИЗМ МНОГОКРАТНОГО КООРДИНАТНОГО СОЕДИНИТЕЛЯ | 1966 |
|
SU177933A1 |
| ЭЛЕКТРОМАГНИТНЫЙ ПРИВОД ДЛЯ ВЫБИРАЮЩЕГО ЭЛЕКТРОМАГНИТА МНОГОКРАТНОГО КООРДИНАТНОГО | 1965 |
|
SU171024A1 |
| Координатный соединитель с многократным полем | 1955 |
|
SU117856A1 |
| ЭЛЕКТРОМАГНИТ ВЫБИРАЮЩЕЙ СИСТЕМЫ МНОГОКРАТНОГО КООРДИНАТНОГО СОЕДИНИТЕЛЯ | 1966 |
|
SU185964A1 |
| МНОГОКРАТНЫЙ КООРДИНАТНЫЙ СОЕДИНИТЕЛЬ | 1968 |
|
SU207257A1 |
| МНОГОКРАТНЫЙ КООРДИНАТНЫЙ СОЕДИНИТЕЛЬ | 1970 |
|
SU259966A1 |
| Устройство для включения многократного координатного соединителя | 1974 |
|
SU513409A1 |
| Удерживающий механизм для многократного координатного соединителя | 1960 |
|
SU136783A1 |
| УНИВЕРСАЛЬНЫЙ РОБОТ ДЛЯ ИНТЕРВЕНЦИОННОЙ АНГИОГРАФИЧЕСКОЙ ХИРУРГИИ И ИНТЕРВЕНЦИОННОЙ ТЕРАПЕВТИЧЕСКОЙ ХИРУРГИИ | 2021 |
|
RU2760468C1 |
Изобретение относится к технике проводной связи, в частности к коммуtaanoRным устройствам типа многократных коордннатных соединителей (МКС), применяемых для коммутации разводных пепе АТС.
В известных выбирающих механизмах для МКС гибкие выбирающие пальцы крепятся на основании вертикального блсжа МКС и ввиду их малой длины имеют недостаточную эластичность. Увеличение длины выбирающих пальцев приводит к увеличению габаритов вертикального блока. Недостаточная эластичность выбирающих пальцев обуславливает их низкую износоустойчив сх:ть, что уменьшает срок службы МКС в целом. Кроме того, выбирающие электромагниты МКС при срабатывании расходуют лишнюю энергию на преодоление сил трения между выбирающими пальцами и якорями удерживающих электромагнитов, а также на преодоление сил упругой деформации пальцев после их соприкосновения с ограничителем движе- / ния.V
Наиболее близким к изобретению по технической сущности является выбирающий механизм для МКС, содержащий выбирающие пальцы, закрепленные между
двумя планками.
Цель изобретеиия - увеличение срока службы МКС и уменьшение расхспа анергии электромагнитов за счет умэньщевия сил упругой деформации выбирающих . Это достигается тем, что выбираю-, шие пальцы предлагаемого механизма выполнены в виде фигурных симметричных проволочных пружинных элементе со средней частью П-образной формы, с которой сопряжены крайние участки U -о&разной формы, причем свободные концы каждого элемента образуют собственно пару выбирающих пальцев, а его средняя П-образная часть закреплена между планками.
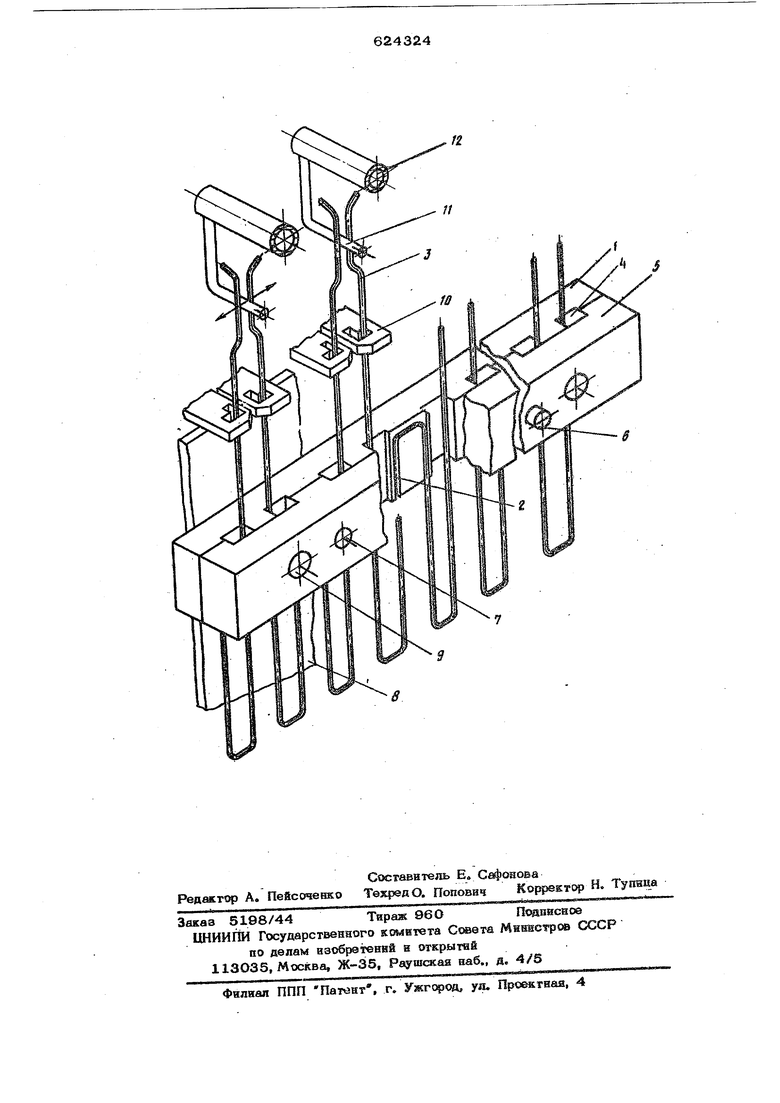
В одной из может быть выполнена канавка для укладки средней П-образной части пружинного элемента и последующего закрепления (удержания)его
при помощи другой планки, а в обеих. планках могут быть вьполневы противо- ; лежашве друг другу пазы, образующие при сборке отверстия, через которые проходят выбирающие салыш с возможносты их бокового перемещения. На чертеже показан описываемые механизм. В плавке 1, выполнеииой, например, вэ термопластичного материала, имеются канавки 2 такого сечения, которое позво ляет уложить в них закрепляемую среднюю П-обравную часть выбирающих пальцев 3 Свободные коваы пальцев проходят через отверстия 4, образованные совпадающими: пазами планок 1 и 5. Планка 1 своими шгыря мн 6 входит в отверстия 7 планки 5, вы полненной также из термопластичного материала, удерживая пальцы 3 от выпадения из кававсж 2 Чтобы планки 1 и 5 не расходились, производят оплавление вьтетуп планки 1, После сборки планки крепят на основания 8 через отверстия 9, например, при помощи вйнтов. Выбирающий кеканизм работает следующим ;о€рааом. Перемещение свободных концов выбирающих пальцев 3 в окнах толкателей . 10 в плоскости основания 8 осуществляе ся рычагом 11, когда выбирающий элект ромагнит МКС {на чертеже не показан) срабатывает и поворачивает щтангу 12, При срабатывании удерживающего магнита(иа чертеже не псжазан) его якорь от-ч водит &се выбирающие пальцы 3 перпендикулярно к основанию 8, при этом тот палец , который рычагом 11 заведен за выступ окна толкателя 10, тянет ва со-, бой этот толкатель и связанные с ним, контактные пружины выбранной 1 у1гаы точек скрещивания (на чертеже не показаны). Благодаря введению ряда элементов :указанной формы для формирования выбирающих пальцев увеличивается срок службы МКС, так как такая форма вновь введенного элемента позволяет без увеличения габаритов вертикального блока МКС увеличить длину и эластичность выбирающих пальцев, а также уменьшить давление пальцев как на якорь, так и на ограничитель движения, и в результате п«жысить их износоустойчивость. Формула изобретения 1. Выбирающий механизм для многократных координатных соединителей, содержащий выбирающие пальцы, закрепленные между двумя планками, о т л и ч а (Ы щ и и с я тем, целью увеличения срсжа службы и уменьшения расхода энергии, выбиpaюtвиe пальцы выполнены в виде фигурных симметричных проволочных пружинных элеК/ентов со средней частью |П-обра8ной формы с которой сопряжены крайние участки L -образной формы, причем свободные концы каждого элемента образуют собственно пару выби- рающих пальцев, а его средняя П-обраэная часть закреплена между плаикамв. 2. Механизм .по п. 1, о т л и ч а ющ и и с я тем, что в одной из плансж выполнена канавка для укладки средвей П-образной части пружинного эпементаг последующего удержания его прв помощи другсй плаики, а в обеих плавках вьшол-. нены противолежащие друг другу па8ы, образующие вместе отверстия, через к вторые Ёгроходят выбирающее пальвы.
