ОБЛАСТЬ ИЗОБРЕТЕНИЯ
Настоящее изобретение относится к области техники оборудования для малоинвазивных методов сосудистой хирургии и, более конкретно, к универсальному роботу для интервенционной ангиографической хирургии и интервенционной терапевтической хирургии.
УРОВЕНЬ ТЕХНИКИ
Область интервенционной хирургии включает в себя ангиографическую диагностику, баллонную дилатацию, стентирование и другие методы терапии. Среди них интервенционная ангиография является основой для диагностики сердечно-сосудистых и цереброваскулярных заболеваний, а также основой для дальнейшего лечения, в то время как терапевтическое вмешательство является необходимым этапом для облегчения боли. Существуют некоторые различия в методах работы и способах проведения этих двух видов операций. В Китае имеется несколько проблем, связанных с роботом для интервенционной ангиографии: (1) устройство занимает большой объем, имеет сложную конструкцию и низкую устойчивость, поэтому оно не подходит для применения в клинической хирургии; (2) большинство роботов не имеют системы обратной связи по усилию, что не может гарантировать безопасность проведения операции; (3) имеются неудобства в установке и демонтаже системы; (4) сложный процесс дезинфекции робота, что не отвечает реальным потребностям хирургии; (5) большинство роботов могут применяться только для интервенционной ангиографии или интервенционной терапии, при этом нет интервенционных роботов, которые могли бы выполнять ангиографию и терапию одновременно.
Следовательно, для специалистов в данной области техники является актуальной проблемой создание интервенционного робота, который может одновременно выполнять ангиографию и диагностику.
КРАТКОЕ ОПИСАНИЕ ИЗОБРЕТЕНИЯ
Изобретение направлено на решение одной из вышеупомянутых технических проблем известного уровня техники, по крайней мере, в известной степени.
Интервенционная ангиографическая хирургия является основой диагностики сердечно-сосудистых и цереброваскулярных заболеваний, а также предпосылкой для определения дальнейшего лечения. Интервенционная терапевтическая операция - необходимый этап лечения для облегчения боли. Существуют некоторые различия в процедурах между интервенционной ангиографической хирургией и интервенционной терапевтической хирургией. Камера для дезинфекции, применяемая в интервенционной терапевтической хирургии, описанная в предшествующем уровне техники, не может применяться в интервенционной ангиографической хирургии, потому что в ангиографической хирургии необходимо контролировать вращение ангиографического катетера для плавного ввода в коронарную артерию и достижения цели ангиографии. Однако существующая камера для дезинфекции, применяемая в интервенционной хирургии, не может вращать катетер. Следовательно, целью изобретения является разработка универсального робота для интервенционной ангиографической хирургии и интервенционной терапевтической хирургии с универсальной камерой для дезинфекции, для решения проблемы, заключающейся в том, что в известном уровне техники робот может выполнять только интервенционную ангиографическую хирургию или интервенционную терапевтическую хирургию, следовательно отсутствует интервенционный робот, который мог бы выполнять ангиографию и терапию одновременно.
Настоящее изобретение относится к универсальному роботу для интервенционной ангиографической хирургии и интервенционной терапевтической хирургии, включающему корпус робота. Корпус робота состоит из основания, стойки и манипулятора. Верхняя часть основания подвижно соединяется со стойкой. Верхняя часть стойки соединяется с манипулятором. Передний концевой участок манипулятора соединяется с приводным механизмом и камерой для дезинфекции. Передний концевой участок манипулятора удерживает приводной механизм и камеру для дезинфекции.
Камера для дезинфекции включает в себя корпус стерильной камеры и крышку стерильной камеры, шарнирно прикрепленную к одной стороне корпуса стерильной камеры. Управляющий концевой узел катетера и направляющий узел проволочного проводника закреплены в корпусе стерильной камеры. На одном концевом участке корпуса стерильной камеры предусмотрен узел Y-образного клапана. Узел Y-образного клапана включает в себя фиксирующий элемент Y-образного клапана, удерживающий элемент Y-образного клапана, основной корпус Y-образного клапана и приводную шестерню Y-образного клапана.
Один концевой участок фиксирующего элемента Y-образного клапана поворачивается на одном концевом участке корпуса стерильной камеры в направлении продвижения катетера и проволочного проводника. Другой концевой участок фиксирующего элемента Y-образного клапана магнитно связан с корпусом стерильной камеры. В середине фиксирующего элемента Y-образного клапана предусмотрено сквозное отверстие для зацепления. В корпусе стерильной камеры имеется отверстие вала, положение которого соответствует сквозному отверстию для зацепления. Нижняя часть оси приводной шестерни Y-образного клапана вращается в отверстии вала, и нижняя часть оси снабжена осевой шестерней, зацепленной с выходной шестерней привода в приводном механизме. В сквозном отверстии для зацепления предусмотрена приводная шестерня Y-образного клапана. Удерживающий элемент Y-образного клапана включает в себя, по меньшей мере, два набора дугообразных элементов, с образованием кольцевого элемента. На кольцевом элементе предусмотрено зубчатое кольцо, входящее в зацепление с приводной шестерней Y-образного клапана. Один конец основного корпуса Y-образного клапана закреплен в удерживающем элементе Y-образного клапана через эластичный наполнитель, а другой конец основного корпуса Y-образного клапана закреплен на фиксирующем элементе Y-образного клапана.
Согласно вышеупомянутому техническому решению, по сравнению с предшествующим уровнем техники, настоящее изобретение раскрывает универсальный робот для интервенционной ангиографической хирургии и интервенционной терапевтической хирургии с измененной конструкцией узла Y-образного клапана. В частности:
Во-первых, один концевой участок основного корпуса Y-образного клапана фиксируется в удерживающем элементе Y-образного клапана через эластичный наполнитель. За счет деформации эластичного наполнителя можно использовать корпус Y-клапана с различными характеристиками, что позволяет устанавливать катетер или контрастный катетер с разными характеристиками.
Во-вторых, приводная шестерня Y-образного клапана приводится в действие выходной шестерней двигателя в приводном механизме, одновременно с чем приводится в действие зубчатое кольцо на удерживающем элементе Y-образного клапана, что обеспечивает универсальность камеры для дезинфекции для интервенционной радиологии и терапевтических операций.
В-третьих, один концевой участок фиксирующего элемента Y-образного клапана поворачивается на одной стороне корпуса стерильной камеры в направлении вдоль катетера и проволочного проводника, а другой конец фиксирующего элемента Y-образного клапана магнитно соединяется с корпусом стерильной камеры, который позволяет врачу заменять проволочный проводник и катетер и фиксировать основной корпус Y-образного клапана.
Дополнительно, фиксирующий элемент Y-образного клапана включает в себя крепежную пластину, корпус захватного кольца, шарнир и зажим. Крепежная пластина имеет форму бруска. Нижняя часть одного концевого участка крепежной пластины магнитно соединяется с корпусом стерильной камеры. Другой концевой участок крепежной пластины соединяется с одним концевым участком корпуса захватного кольца как единое целое. Посередине корпуса захватного кольца выполнено сквозное отверстие для зацепления. Другой концевой участок корпуса захватного кольца соединяется с шарниром. Шарнир шарнирно соединяется с шарнирным блоком, предусмотренным на корпусе стерильной камеры рядом с внешней стороной отверстия вала. Вдоль продольного направления крепежной пластины расположены, по меньшей мере, два зажима. Другой концевой участок основного корпуса Y-образного клапана соприкасается с зажимом. Зажим обладает определенной эластичностью, а в верхней части зажим выполнен с отверстием для удобства установки и демонтажа. На внутренней стороне корпуса стерильной камеры рядом с отверстием вала устанавливается первый электромагнит Y-образного клапана. Первый электромагнит Y-образного клапана магнитно связан с соответствующим вторым электромагнитом Y-образного клапана, расположенным в нижней части крепежной пластины. Таким образом, корпус Y-образного клапана удобно фиксируется.
Второй целью настоящего изобретения является создание универсального робота для интервенционной ангиографической хирургии и интервенционной терапевтической хирургии с основанием, включающим опорную плиту стойки, стопор, поперечную перемычку, направляющую основания, ползун основания и зубчатую рейку. Стопоры закреплены на опорной плите стойки. Поперечные перемычки фиксируются стопором и размещаются в основании катетера. На верхней части опорной плиты стойки установлена зубчатая рейка, расположенная в продольном направлении опорной плиты стойки. Две направляющие основания расположены симметрично с обеих сторон зубчатой рейки, и каждая направляющая основания подвижно соединена с ползунами основания. Нижняя часть стойки снабжена соединительной пластиной. Нижняя часть соединительной пластины закреплена на ползунах основания, а верхняя часть соединительной пластины соединена с серводвигателем основания. Выходной конец серводвигателя основания снабжен шестерней основания, находящейся в зацеплении с зубчатой рейкой. Серводвигатель основания приводит в движение шестерню основания и зубчатую рейку, а стойка приводит в движение манипулятор и приводной механизм для выполнения поступательного движения, чтобы приводить в движение весь приводной механизм для выполнения перемещения вперед или назад. На приводном механизме устанавливается катетер для визуализации. При движении элементов устройства осуществляется ввод катетера в тело пациента или выводит из него с завершением процесса ангиографии. Таким образом, возвратно-поступательное движение элементов устройства позволяет уменьшить занимаемое оборудованием пространство до равносильного тому, сколько занимает врач при проведении практической интервенционной операции.
Стопоры также играют роль механического ограничителя, который используется при соприкосновении с соединительной пластиной.
Дополнительно, сторона опорной плиты стойки, прилегающая к поперечной перемычке снабжена скользящей канавкой, в которую вставляется боковая направляющая основания катетера. Внизу скользящей канавки имеются натяжные винты для фиксации. Опорная плита стойки также снабжена разъемом для провода, который используется для подключения линии питания и линии связи.
Две поперечные перемычки стойки могут быть размещены на опорной плите катетера. Две поперечные перемычки совместно со скользящей канавкой направляющей, закрепленной на основания катетера стойки, образуют стабильную конструкцию, образованную тремя элементами. Таким образом, обеспечивается стабильное соединение манипулятора и основания катетера. Высота стойки манипулятора подобрана таким образом, что гарантирует, что она не будет касаться пациента и не будет находиться слишком далеко от пациента.
Дополнительно, манипулятор включает в себя заднее плечо, среднее плечо и переднее плечо, соединенные с возможностью вращения поочередно. Один конец заднего плеча соединен с возможностью вращения с верхней частью стойки. Передний конец переднего плеча соединен с приводным механизмом и камерой для дезинфекции. Передний конец переднего плеча удерживает приводной механизм и камеру для дезинфекции. Каждое указанное выше вращающееся соединение снабжено кольцевым световым индикатором соответственно. Кольцевые световые индикаторы отображают разные цвета в соответствии с разными сигналами, отправляемыми схемой управления роботом, чтобы передавать различную информацию о состоянии робота. Манипулятор изготовлен из прочного и легкого алюминиевого сплава. Три прямых плеча изготовлены из полых алюминиевых профилей, что значительно снижает вес манипулятора.
Дополнительно, заднее плечо и среднее плечо имеют одинаковую конструкцию, и оба включают в себя поперечный вал, соединительный узел первого вращающегося вала, узел фиксации вращающегося вала и первый вращающийся вал. Соединительный узел первого вращающегося вала включает в себя соединитель первого вращающегося вала, первый смазочный блок, первый кронштейн, первую прижимную резьбовую заглушку и первую втулку вала. Один конец соединителя первого вращающегося вала зафиксирован с одним концом поперечного вала. На соединителе первого вращающегося вала сформирована канавка для размещения первого смазочного блока. Первая втулка вала проходит через сквозное отверстие посередине соединителя первого вращающегося вала и первого смазочного блока. Два первых кронштейна для установки кольцевых световых индикаторов симметрично закреплены с обеих сторон соединителя первого вращающегося вала. Первая прижимная резьбовая заглушка закреплена на соединителе первого вращающегося вала для крепления кабелей; узел фиксации вращающегося вала включает в себя крепежную часть вращающегося вала, прижимную пластину для проводов, ограничительный элемент поперечного вала, прижимное кольцо и Т-образную уплотнительную прокладку. Один конец крепежной части вращающегося вала имеет вертикально расположенную стенку для фиксации другого конца поперечного вала. Стенка выступает за поперечный вал, образуя вертикально расположенный участок установки вала. Первый вращающийся вал устанавливается на участке установки вала с помощью болтов. Т-образная уплотнительная прокладка расположена между верхней частью фиксирующего посадочного места первого вращающегося вала и идентичной группой втулок первого вала. Верхняя часть Т-образной уплотнительной прокладки фиксируется с помощью прижимного кольца. Верхний участок крепежной части вращающегося вала снабжен прижимной пластиной для проводов для фиксации кабелей. Две группы ограничительных элементов поперечного вала, предусмотренных с обеих сторон крепежной части вращающегося вала, и упорный винт, предусмотренный в нижней части соединителя первого вращающегося вала, согласованный с ограничительными элементами поперечного вала, образуют стопорный механизм для ограничения вращения поперечного вала.
Дополнительно, переднее плечо включает в себя переднюю поперечную пластину, привод, наклонную вертикальную пластину, соединительный узел второго вращающегося вала, узел соединительного вала переднего плеча и второй вращающийся вал. Верхняя часть передней поперечной пластины соединена с приводом для приведения в действие шагового двигателя в приводном механизме, а один конец передней поперечной пластины жестко соединен с соединительным узлом второго вращающегося вала с помощью наклонной вертикальной пластины. Соединительный узел второго вращающего вала соединен с первым вращающимся валом. Другой конец передней поперечной пластины прикреплен к узлу соединительного вала переднего плеча. Второй вращающийся вал совмещен с узлом соединительного вала переднего плеча и соединен с приводным механизмом.
Дополнительно, соединительный узел второго вращающегося вала включает в себя соединитель второго вращающегося вала, второй смазочный блок, втулку второго вала и второй кронштейн. Один конец соединителя второго вращающегося вала закреплен в верхней части наклонной вертикальной пластины с помощью винта, а внутри соединителя второго вала сформирована удерживающая канавка для удерживания второго смазочного блока. Втулка второго вала проходит через сквозное отверстие посередине соединителя второго вращающегося вала и второго смазочного блока. Два вторых кронштейна закреплены на обеих сторонах соединителя второго вращающегося вала для установки кольцевого светового индикатора. Узел соединительного вала переднего плеча включает в себя опору вала, третий смазочный блок, фланцевый подшипник, шайбу и стопорное кольцо второго вращающегося вала. Опора вала закреплена на передней поперечной пластине. Третий смазочный блок закреплен на одной стороне опоры вала. Второй вращающийся вал закреплен на боковой стенке приводного механизма. Второй вращающийся вал, шайба, фланцевый подшипник и стопорное кольцо второго вращающегося вала совмещены и установлены на опоре вала, так что приводной механизм вращается вдоль опоры вала.
Дополнительно, приводной механизм включает в себя корпус, ведущий узел проволочного проводника, ведомый узел проволочного проводника и управляющий концевой узел катетера. Одна сторона корпуса соединена с возможностью вращения с манипулятором. Внутренняя часть корпуса используется для поддержки и размещения ведущего узла проволочного проводника, ведомого узла проволочного проводника и управляющего концевого узла катетера. Камера для дезинфекции магнитно соединена с верхней частью корпуса. Верхняя часть управляющего концевого узла катетера входит в камеру для дезинфекции. Ведущий узел проволочного проводника и ведомый узел проволочного проводника симметрично расположены вдоль проволочного проводника. Сторона ведущего узла проволочного проводника, близкая к проволочному проводнику, и сторона ведомого узла проволочного проводника, близкая к проволочному проводнику, соединены с направляющим узлом проволочного проводника, соответственно.
Дополнительно, ведущий узел проволочного проводника включает в себя соединительную пластину ведущего узла и две группы ведущих концевых частей. Каждая группа ведущих концевых частей включает в себя U-образный паз соединителя, высокоточный тензодатчик ведущего узла, первый ползун, первую микролинейную направляющую, прямоугольную соединительную пластину и соединительную деталь ведущего узла. Верхняя часть соединительной детали ведущего узла скользит параллельно проволочному проводнику в направлении длины соединительной пластины ведущего узла. Нижняя часть прямоугольной соединительной пластины скользит перпендикулярно проволочному проводнику по верхней части соединительной детали ведущего узла. Наружная часть вертикальной пластины, соединенной с одним концом прямоугольной соединительной пластины, стыкуется с распределительным валом, а верхняя часть другого концевого участка фиксируется с первой микролинейной направляющей, параллельной проволочному проводнику. Первый ползун скользит по первой микролинейной направляющей, а U-образный паз соединителя закреплен на верхней части первого ползуна, чтобы противодействовать усилию зажима проволочного проводника. Высокоточный тензодатчик ведущего узла расположен перпендикулярно проволочному проводнику. Один конец высокоточного тензодатчика ведущего узла закреплен на внутренней стороне вертикальной пластины, а другой конец вставлен в U-образный паз соединителя, и ширина углубления паза больше, чем ширина высокоточного тензодатчика ведущего узла. Высокоточный тензодатчик ведущего узла используется для измерения трения проволочного проводника. Сторона, удаленная от углубления U-образного паза соединителя, фиксируется с одним концом первой зажимной детали.
Ведомый узел проволочного проводника включает в себя соединительную пластину ведомого узла, высокоточный тензодатчик ведомого узла, микролинейную направляющую ведомого узла, ползун ведомого узла, соединительную деталь ведомого узла и две группы ведомых подвижных частей. Боковая поверхность соединительной пластины ведомого узла рядом с проволочным проводником соединяется с высокоточным тензодатчиком ведомого узла. Верхняя часть соединительной пластины ведомого узла соединена с микролинейной направляющей ведомого узла. Два соединительных элемента ведомого узла закреплены на верхних частях двух ползунов ведомого узла и скользят по микролинейной направляющей ведомого узла. Верхняя часть каждой соединительной детали ведомого узла жестко соединена с ведомой подвижной частью, согласованной с ведущей подвижной частью ведущего узла проволочного проводника, соответственно. Высокоточный тензодатчик ведомого узла передает сигнал изменения усилия, полученный в процессе поворота и зажима, на управляющий конец ведущего узла приводного механизма.
В изобретении приводная часть, расположенная с обеих сторон ведущего узла, приводит в движение ведущий узел проволочного проводника для перемещения вперед или назад относительно ведомого узла проволочного проводника в направлении, перпендикулярном направлению проталкивания проволочного проводника. Высокоточный тензодатчик, расположенный на соединительной пластине, передает сигнал изменения усилия, полученный в процессе поворота и зажима, на управляющий конец ведущего узла приводного механизма. Управляющий конец ведущего узла приводного механизма обнаруживает изменение усилия зажима, сравнивая изменение значения усилия обратной связи, и регулирует степень зажима проволочного проводника в соответствии с состоянием зажима, чтобы робот правильно прикладывал усилие зажима для завершения операции, и выполнения безопасной операции с высокой точностью. В то же время, когда усилие зажима выходит за пределы (слишком высокое значение или слишком малое значение), врач может получить своевременное сообщение через управляющий конец ведущего узла приводного механизма робота, и управляющий конец является предохранительным устройством и помогает врачу лучше выполнять интервенционную хирургическую операцию.
В то же время, конструкция ведущего узла в изобретении относительно проста, компактна и устойчива. Когда подвижная часть подвергается усилию в направлении зажима проволочного проводника, усилие передается на прямоугольную соединительную пластину через U-образный паз соединителя, первый ползун и первую микролинейную направляющую. Высокоточный тензодатчик ведущего узла измеряет только осевое усилие проволочного проводника, то есть усилие сжатия-растяжения, считываемое высокоточным тензодатчиком (трение проволочного проводника), чтобы оценить изменение усилия осевого трения проволочного проводника. Это дает врачу своевременную информацию об операции и обеспечивает безопасность для пациентов. В изобретении используют метод косвенного измерения усилия и решают проблему неудобства установки проволочного проводника и устройства измерения усилия.
КРАТКОЕ ОПИСАНИЕ ЧРЕТЕЖЕЙ
Для более ясного пояснения вариантов осуществления настоящего изобретения или технических решений в предшествующем уровне техники будут кратко представлены следующие чертежи, которые необходимо использовать в описании вариантов осуществления или предшествующего уровня техники. Очевидно, что чертежи в нижеследующем описании иллюстрируют только варианты осуществления настоящего изобретения. Для специалистов в данной области техники другие чертежи могут быть получены на основе данных чертежей, выполненных без творческого вклада.
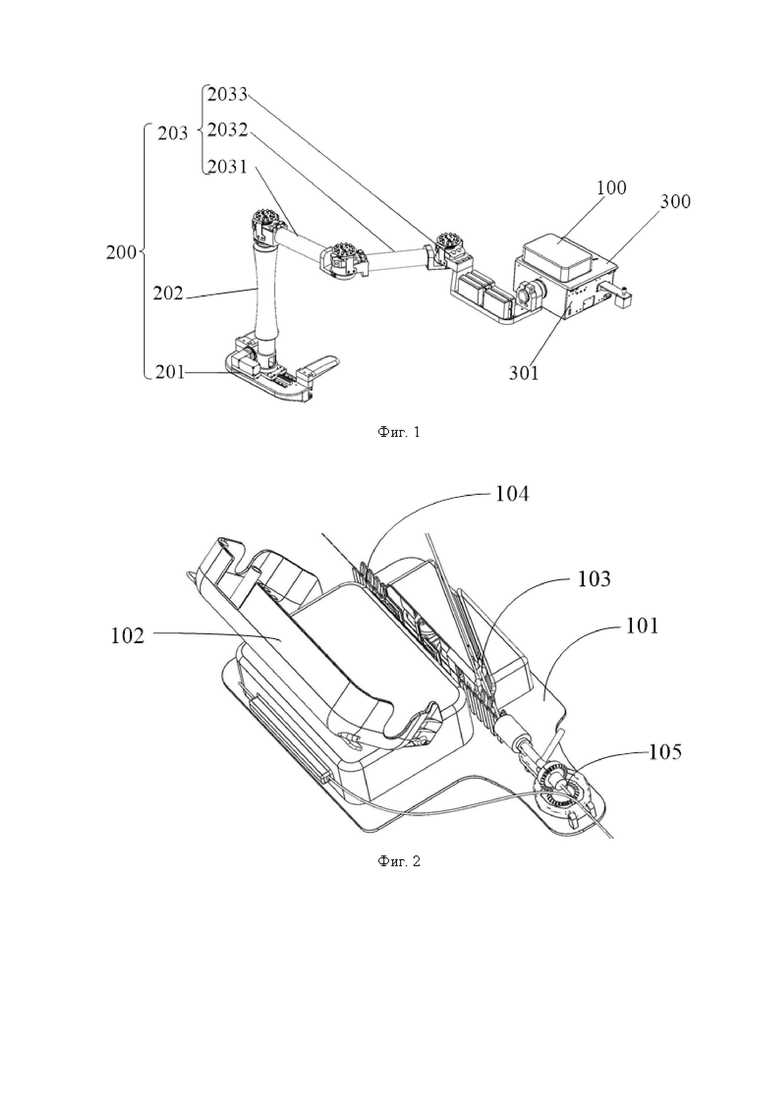
Фиг. 1 - структурная схема универсального робота для интервенционной ангиографической хирургии и интервенционной терапевтической хирургии, представленного в изобретении;
Фиг. 2 - структурная схема камеры для дезинфекции;
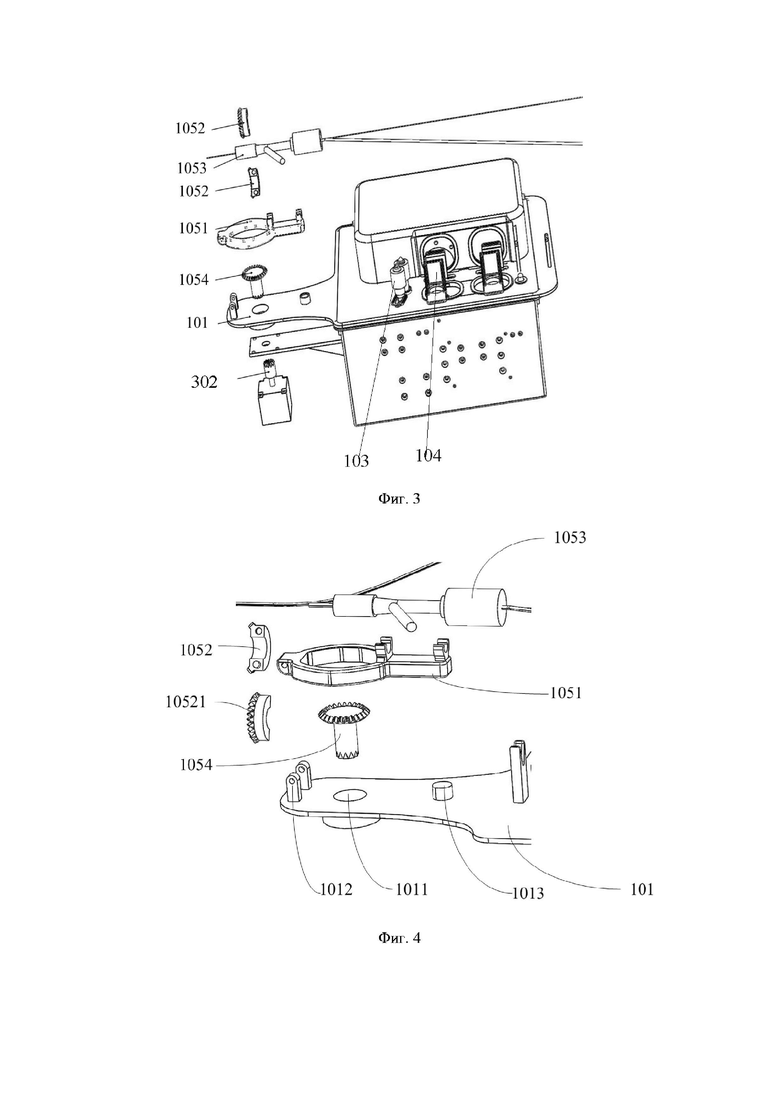
Фиг. 3 и Фиг. 4 представляет собой конструкцию Y-образного клапана и камеры для дезинфекции в разобранном виде;
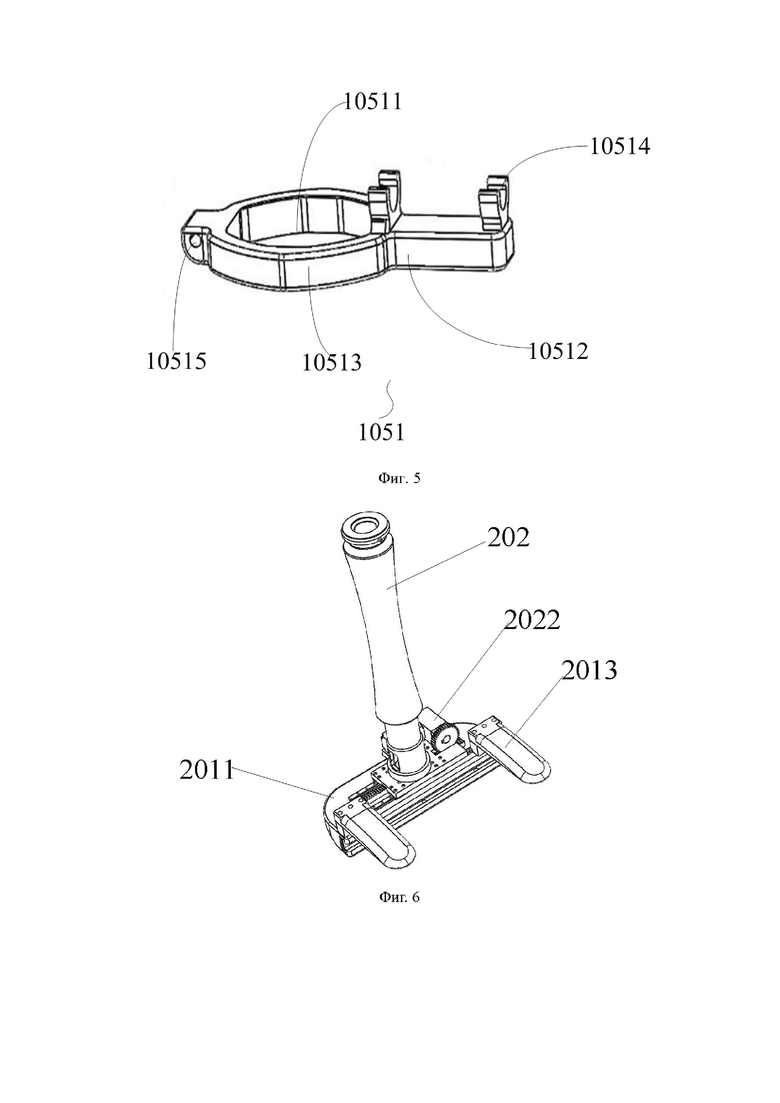
Фиг. 5 - увеличенный вид Y-образного клапана в сборе;
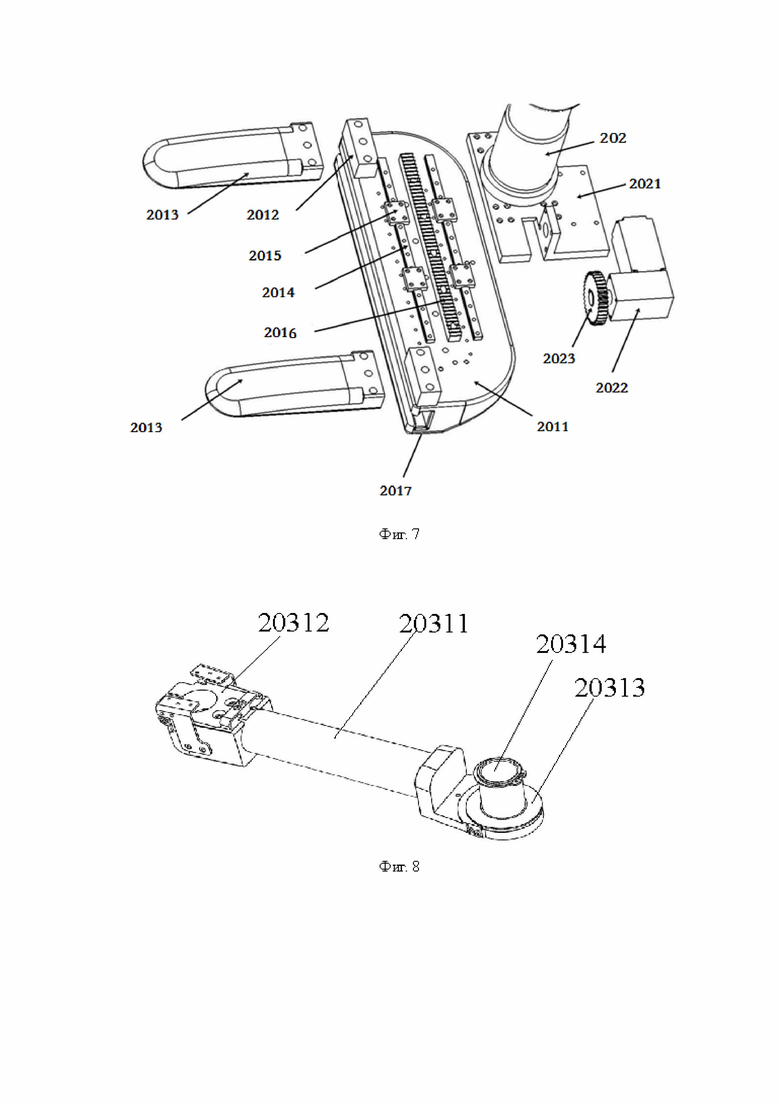
Фиг. 6 - структурная схема основания и стойки;
Фиг. 7 - конструкция основания в разобранном виде;
Фиг. 8 - структурная схема среднего плеча или заднего плеча;
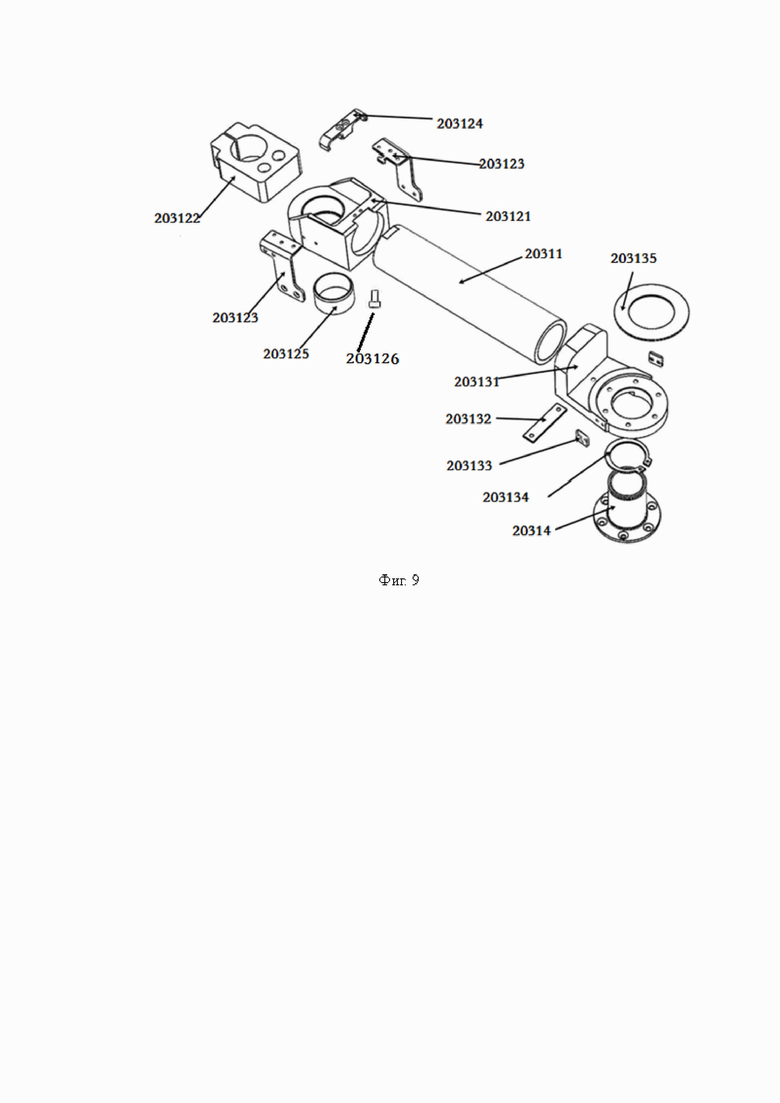
Фиг. 9 – конструкция, показанная на фиг. 8, в разобранном виде;
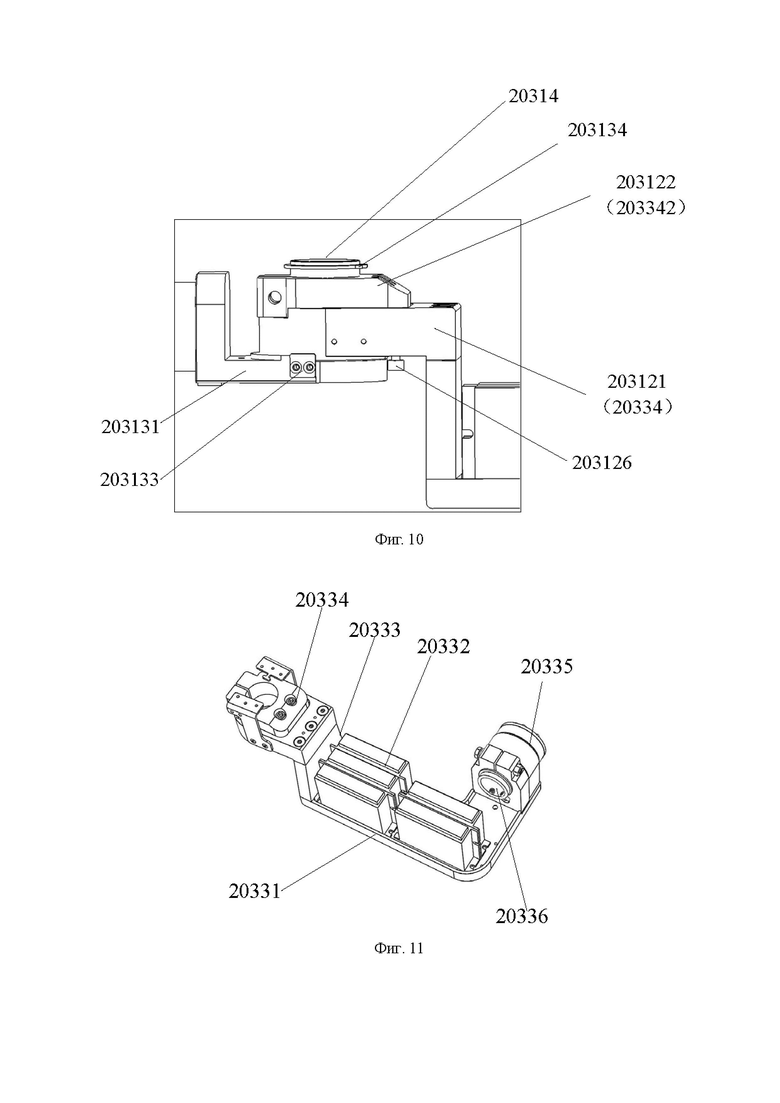
Фиг. 10 - схема, показывающая соединение заднего плеча и среднего плеча;
Фиг. 11 - структурная схема переднего плеча;
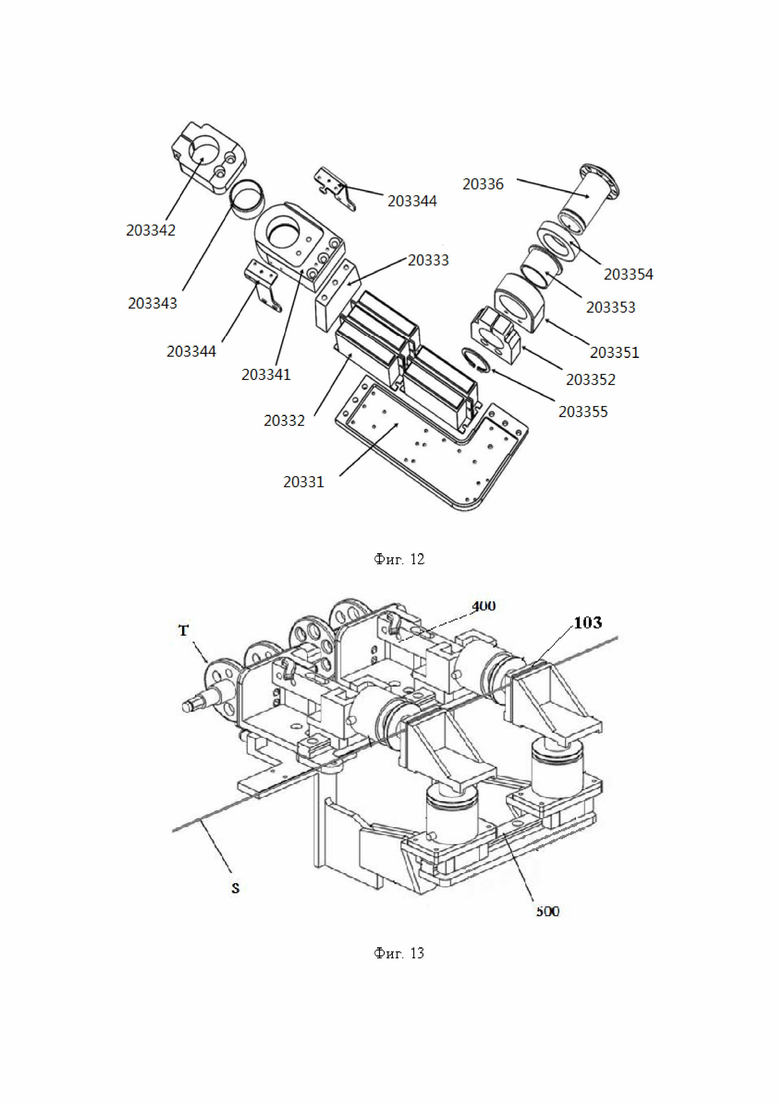
Фиг. 12 - конструкция, показанная на фиг. 10, в разобранном виде;
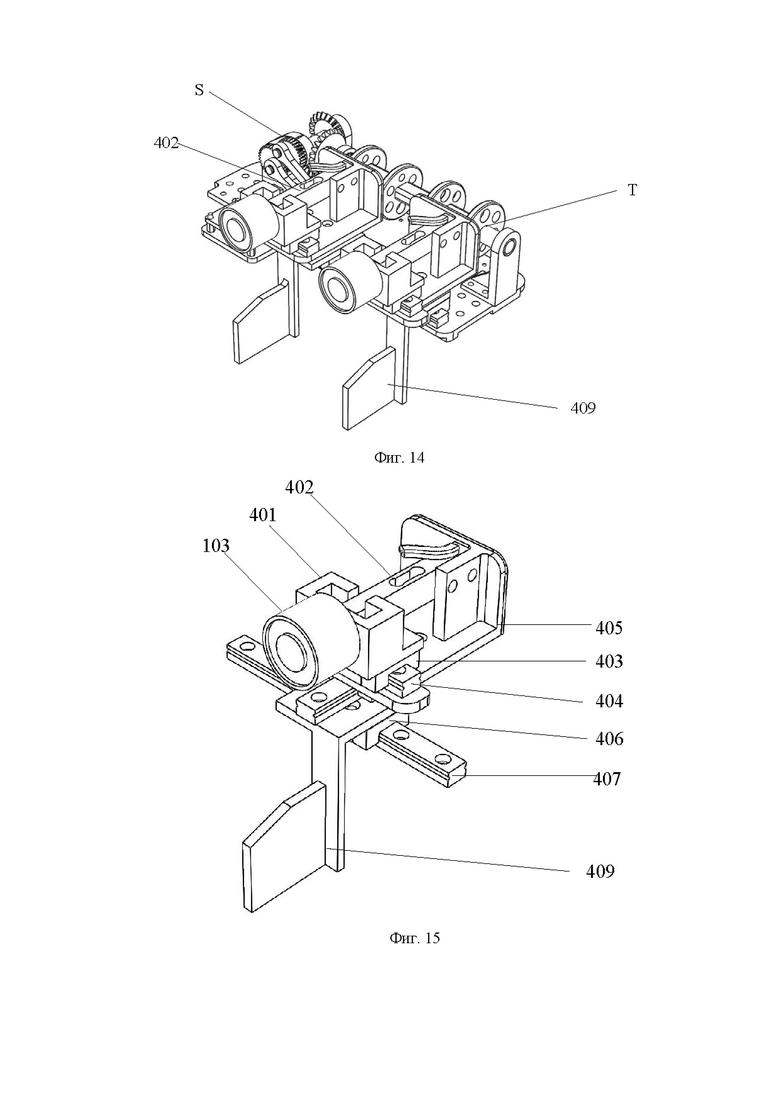
Фиг. 13 показывает ведущий узел проволочного проводника и ведомый узел проволочного проводника;
Фиг. 14 и Фиг. 15 - структурные схемы ведущего узла проволочного проводника;
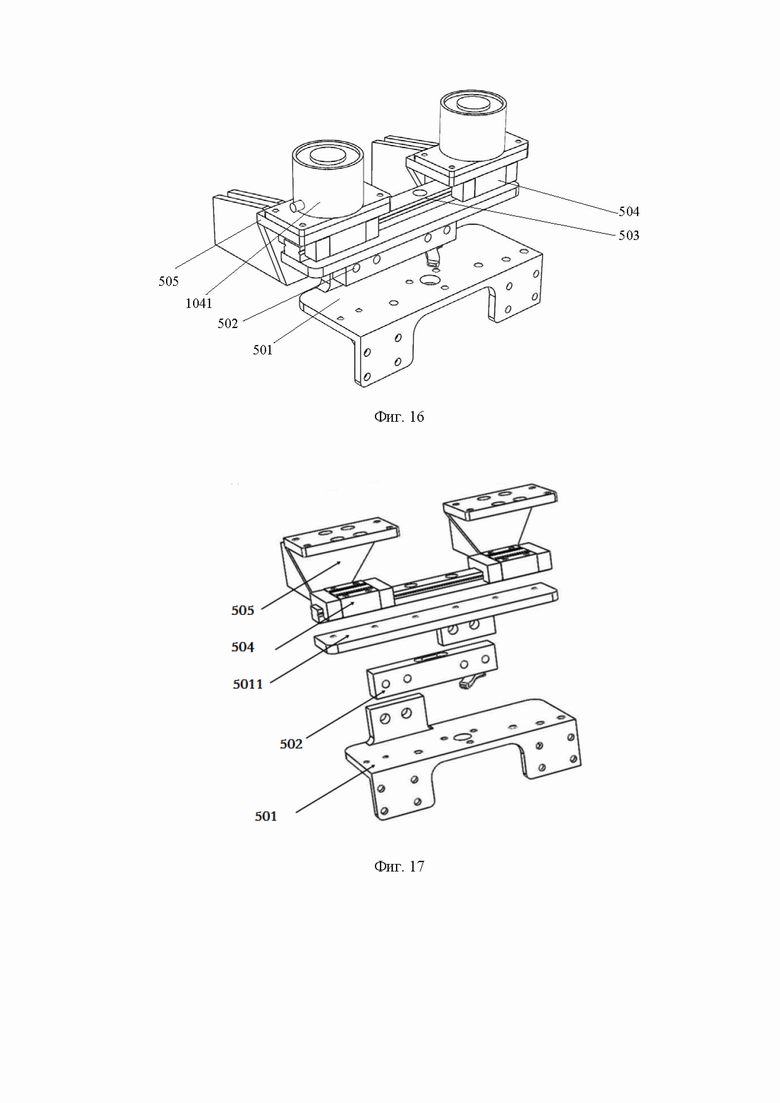
Фиг. 16 и Фиг. 17 - структурные схемы ведомого узла проволочного проводника.
На чертежах: 100 – камера для дезинфекции, 101 – корпус стерильной камеры, 1011 – отверстие вала, 1012 – шарнирный блок, 1013 – первый электромагнит Y -образного клапана, 102 – крышка стерильной камеры, 103 – управляющий концевой узел катетера, 104 – направляющий узел проволочного проводника, 1041 – ведомая подвижная часть, 105 – узел Y-образного клапана, 1051 – фиксирующий элемент Y-образного клапана, 10511 – сквозное отверстие для зацепления, 10512 – крепежная пластина, 10513 – корпус захватного кольца, 10514 - зажим, 10515 - шарнир, 1052 – удерживающий элемент Y-образного клапана, 10521 – зубчатое кольцо, 1053 – основной корпус Y-образного клапана, 1054 – приводная шестерня Y-образного клапана;
200 – корпус робота, 201 - основание, 2011 – опорная плита стойки, 2012 - стопоры, 2013 – поперечные перемычки, 2014 – направляющие основания, 2015 – ползуны основания, 2016 – зубчатая рейка, 2017 – скользящая канавка, 202 - стойка, 2021 – соединительная пластина, 2022 – серводвигатель основания, 2023 – шестерня основания, 203 - манипулятор; 2031 – переднее плечо, 20311 – поперечный вал, 20312 – соединительный узел первого вращающегося вала, 203121 – соединитель первого вращающегося вала, 203122 – первый смазочный блок, 203123 – первый кронштейн, 203124 – первая прижимная резьбовая заглушка, 203125 – втулка первого вала, 203126 – упорный винт, 20313 – узел фиксации вращающегося вала, 203131 – крепежная часть вращающегося вала, 203132 – прижимная платина для проводов, 203133 – ограничительный элемент поперечного вала, 203134 – прижимное кольцо, 203135 – Т-образная уплотнительная прокладка, 20314 – первый вращающийся вал, 2032 – среднее плечо, 2033 – переднее плечо, 20331 – передняя поперечная пластина, 20332 - привод, 20333 – наклонная вертикальная пластина, 20334 – соединительный узел второго вращающегося вала, 203341 – соединитель второго вращающегося вала, 203342 – второй смазочный блок, 203343 – втулка второго вала, 203344 – второй кронштейн, 20335 – узел соединительного вала переднего плеча, 203351 – опора вала, 203352 – третий смазочный блок, 203353 – фланцевый подшипник, 203354 - шайба, 203355 – стопорное кольцо второго вращающегося вала, 20336 – второй вращающийся вал;
300 – приводной механизм, 301 - корпус, 302 – выходная шестерня привода
400 – ведущий узел проволочного проводника,
401 - U-образный паз соединителя, 402 – высокоточный тензодатчик ведущего узла, 403 – первый ползун, 404 – первая микролинейная направляющая, 405 – прямоугольная соединительная пластина, 406 – второй ползун, 407 – вторая микролинейная направляющая, 409 – соединительная деталь ведущего узла;
500 – ведомый узел проволочного проводника, 501 – соединительная пластина ведомого узла, 502 - высокоточный тензодатчик ведомого узла, 503 – микролинейная направляющая ведомого узла, 504 – ползун ведомого узла, 505 – соединительная деталь ведомого узла, 5011 – верхняя соединительная пластина;
S -проволочный проводника, T – распределительный вал.
ДЕТАЛЬНОЕ ОПИСАНИЕ ВАРИАНТОВ ОСУЩЕСТВЛЕНИЯ
Далее подробно описываются варианты осуществления настоящего изобретения, проиллюстрированные на прилагаемых чертежах, на которых одинаковые или аналогичные элементы или элементы, имеющие схожие функции, обозначены одинаковыми позициями. Варианты осуществления, описанные ниже со ссылкой на прилагаемые чертежи, представлены в качестве примеров и предназначены для объяснения изобретения и не должны толковаться как ограничение объема изобретения.
В описании изобретения следует понимать, что термины «сверху», «снизу», «спереди», «сзади», «слева», «справа», «по вертикали», «по горизонтали», «верх», «низ», «внутри», «снаружи» и т. д., обозначают ориентацию или взаимное расположение элементов на показанных чертежах для облегчения описания изобретения, а не для указания или определения того, что указанные устройства или элементы должны иметь определенную ориентацию, быть сконструированы и работать в определенном положении, и, следовательно, это не следует рассматривать как ограничение объема изобретения.
Кроме того, термины «первый», «второй» используются только в целях описания и не должны толковаться как указывающие или подразумевающие относительную важность одних элементов по отношению к другим или косвенно указывающие количество технических признаков. Таким образом, признак, определенный как «первый» или «второй», может включать в себя один или несколько прямых или косвенных признаков. В описании настоящего изобретения «множественное число» означает два или больше двух, если специально не определено иное.
В настоящем изобретении, если иное явно не указано и не определено, термины «установить», «соединить» и «зафиксировать» следует понимать в широком смысле. Например, неподвижное соединение или разъемное соединение, или выполненное как одно целое; механически или электрически соединенные; прямо или косвенно соединенные через промежуточный элемент, либо взаимодействующие друг с другом или воздействующие друга на друга. Специалисты в данной области техники могут понять конкретные значения приведенных выше терминов в настоящем изобретении, в зависимости от ситуации.
В настоящем изобретении, если явно не указано и не определено иное, если первый элемент расположен «сверху» или «снизу» относительно второго элемента, то первый и второй элементы могут быть в непосредственном соединении друг с другом; также возможен вариант, при котором первый и второй элементы расположены не в прямом соединении, а посредством дополнительного соединения между ними. Кроме того, слова «сверху», «над» и «на», относящиеся к первому элементу, определяют, что первый элемент находится непосредственно над вторым элементом и по диагонали над вторым элементом, или просто указывают, что первый элемент расположен выше, чем второй элемент. Если первый элемент находится «снизу», «ниже» и «под», вторым элементом, то первый элемент находит непосредственно под вторым элементом и по диагонали под вторым элементом, или просто указывает, что первый элемент расположен ниже второго элемента.
Обращаясь к Фиг. 1 - Фиг. 5, вариант осуществления изобретения раскрывает универсальный робот для интервенционной ангиографической хирургии и интервенционной терапевтической хирургии, включающий корпус робота 200. Корпус робота 200 включает в себя основание 201, стойку 202 и манипулятор 203. Стойка 202 соединена с верхней частью основания 201 с возможностью скольжения. Верхняя часть стойки 202 соединена с манипулятором 203. Передний конец манипулятора 203 соединен с приводным механизмом 300 и камерой для дезинфекции 100. Передний конец манипулятора 203 удерживает приводной механизм 300 и камеру для дезинфекции 100.
Камера для дезинфекции 100 включает в себя корпус стерильной камеры 101 и крышку стерильной камеры 102, шарнирно прикрепленную к одной стороне корпуса стерильной камеры 101. Управляющий концевой узел катетера 103 и направляющий узел проволочного проводника 104 закреплены в корпусе стерильной камеры 101. На одном концевом участке корпуса стерильной камеры 101 предусмотрен узел Y-образного клапана 105. Узел Y-образного клапана 105 включает в себя фиксирующий элемент Y-образного клапана 1051, удерживающий элемент Y-образного клапана 1052, основной корпус Y-образного клапана 1053 и приводную шестерню Y-образного клапана 1054.
Один концевой участок фиксирующего элемента Y-образного клапана 1051 поворачивается на одном концевом участке корпуса стерильной камеры 101 в направлении продвижения катетера и проволочного проводника S. Другой концевой участок фиксирующего элемента Y-образного клапана 1051 магнитно связан с корпусом стерильной камеры 101. В середине фиксирующего элемента Y-образного клапана 1051 предусмотрено сквозное отверстие для зацепления 10511. В корпусе стерильной камеры 101 имеется отверстие вала 1011, положение которого соответствует сквозному отверстию для зацепления 10511. Нижняя часть оси приводной шестерни Y-образного клапана 1054 вращается в отверстии вала 1011, и нижняя часть оси снабжена осевой шестерней, зацепленной с выходной шестерней привода 302 в приводном механизме. Приводная шестерня Y-образного клапана 1054 предусмотрена в сквозном отверстии для зацепления 10511. Удерживающий элемент Y-образного клапана 1052 включает в себя, по меньшей мере, два набора дугообразных элементов, соединяемых с образованием кольцевого элемента. На кольцевом элементе предусмотрено зубчатое кольцо 10521, входящее в зацепление с приводной шестерней Y-образного клапана 1054. Один конец основного корпуса Y-образного клапана 1053 закреплен в удерживающем элементе Y-образного клапана 1052 через эластичный наполнитель, а другой конец основного корпуса Y-образного клапана 1053 закреплен на фиксирующем элементе Y-образного клапана 1051.
Универсальный робот для интервенционной ангиографической хирургии и интервенционной терапевтической хирургии, раскрытый в настоящем описании, выполняется с измененной конструкцией узла Y-образного клапана. В частности:
Во-первых, один концевой участок основного корпуса Y-образного клапана фиксируется в удерживающем элементе Y-образного клапана через эластичный наполнитель. За счет деформации эластичного наполнителя можно использовать корпус Y-клапана с различными характеристиками, что позволяет устанавливать катетер или контрастный катетер с разными характеристиками.
Во-вторых, приводная шестерня Y-образного клапана приводится в действие выходной шестерней привода в приводном механизме, одновременно с чем приводится в действие зубчатое кольцо на удерживающем элементе Y-образного клапана, что обеспечивает универсальность камеры для дезинфекции для интервенционной радиологии и терапевтических операций.
В-третьих, один концевой участок фиксирующего элемента Y-образного клапана поворачивается на одной стороне корпуса стерильной камеры в направлении вдоль катетера и проволочного проводника, а другой конец фиксирующего элемента Y-образного клапана магнитно соединяется с корпусом стерильной камеры, что позволяет врачу заменять проволочный проводник и катетер и фиксировать основной корпус Y-образного клапана.
Выходная шестерня привода приводит в действие приводную шестерню Y-образного клапана, которая, в свою очередь, приводит в движение зубчатое кольцо на удерживающем элементе Y-образного клапана для последующего поворота ангиографического катетера. Прямое и обратное вращение привода соответствует вращению катетера по часовой стрелке и против часовой стрелке соответственно. Корпус стерильной камеры снабжен полузамкнутым рукавом, внутренний диаметр которого больше диаметра катетера и может окружать внешнюю часть ангиографического катетера, при этом рукав может закрепляться на внешнем корпусе. Когда механизм продвижения полностью перемещается, ангиографический катетер может перемещаться по рукаву, входя в корпус и выходя из него.
Весь процесс ангиографической хирургии в описании относится к области с высоким излучением рентгеновских лучей. Врачу необходимо вручную довести катетер и проволочный проводник к пораженному участку. В этот момент робот выполняет остальную часть операции, требующей точности. Робот, согласно описанию, также должен взаимодействовать с камерой для дезинфекции, расположенной над приводным механизмом. Камера для дезинфекции представляет собой стерильный одноразовый элемент, что позволяет эффективно решить проблему сложной дезинфекции хирургического робота в клинической практике.
Крышка стерильной камеры может поворачиваться на 150 градусов, с установленным снизу электромагнитом для удержания и открытой ручкой в верхней части. Эластичный наполнитель может представлять собой губчатый материал, силикагель и т.п.
Обращаясь к фиг. 5, фиксирующий элемент Y-образного клапана 1051 включает в себя крепежную пластину 10512, корпус захватного кольца 10513, шарнир 10515 и зажим 10514. Крепежная пластина 10512 имеет форму бруска. Нижняя часть одного концевого участка крепежной пластины 10512 магнитно соединяется с корпусом стерильной камеры 101. Другой концевой участок крепежной пластины 10512 соединяется с одним концевым участком корпуса захватного кольца 10513 как единое целое. Посередине корпуса захватного кольца 10513 выполнено сквозное отверстие для зацепления 10511. Другой концевой участок корпуса захватного кольца 10513 соединяется с шарниром 10515. Шарнир 10515 шарнирно соединяется с шарнирным блоком 1012, предусмотренным на корпусе стерильной камеры 101 рядом с внешней стороной отверстия вала 1011. Вдоль продольного направления крепежной пластины 10512 расположены, по меньшей мере, два зажима 10514. Другой концевой участок основного корпуса Y-образного клапана 1053 соприкасается с зажимом 10514. Зажим обладает определенной эластичностью, а в верхней части зажим выполнен с отверстием для удобства установки и демонтажа. На внутренней стороне корпуса стерильной камеры рядом с отверстием вала устанавливается первый электромагнит Y-образного клапана. Первый электромагнит Y-образного клапана магнитно связан с соответствующим вторым электромагнитом Y-образного клапана, расположенным в нижней части крепежной пластины. Таким образом, корпус Y-образного клапана удобно фиксируется.
Обращаясь к фиг. 6 и фиг. 7, в другом варианте осуществления изобретения основание 201 включает опорную плиту стойки 2011, стопор 2012, поперечную перемычку 2013, направляющую основания 2014, ползун основания 2015 и зубчатую рейку 2016. Стопоры 2012 закреплены на опорной плите стойки 2011. Поперечные перемычки 2013 фиксируются стопором 2012 и размещаются в основании катетера. На верхней части опорной плиты стойки 2011 установлена зубчатая рейка 2016, расположенная в продольном направлении опорной плиты стойки 2011. Две направляющие основания 2014 расположены симметрично с обеих сторон зубчатой рейки 2016, и каждая направляющая основания 2014 подвижно соединена с ползунами основания 2015. Нижняя часть стойки 202 снабжена соединительной пластиной 2021. Нижняя часть соединительной пластины 2021 закреплена на ползунах основания 2015, а верхняя часть соединительной пластины 2021 соединена с серводвигателем основания 2022. Выходной конец серводвигателя основания 2022 снабжен шестерней основания 2023, находящейся в зацеплении с зубчатой рейкой 2016. Серводвигатель основания приводит в движение шестерню основания и зубчатую рейку, а стойка приводит в движение манипулятор и приводной механизм для выполнения поступательного движения, чтобы приводить в движение весь приводной механизм для выполнения перемещения вперед или назад. На приводном механизме устанавливается катетер для визуализации. При движении элементов устройства осуществляется ввод катетера в тело пациента или выводит из него с завершением процесса ангиографии. Таким образом, возвратно-поступательное движение элементов устройства позволяет уменьшить занимаемое оборудованием пространство до равносильного тому, сколько занимает врач при проведении практической интервенционной операции.
Стопоры также играют роль механического ограничителя, который используется при соприкосновении с соединительной пластиной.
Обращаясь к фиг. 7, сторона опорной плиты стойки 2011, прилегающая к поперечной перемычке 2013 снабжена скользящей канавкой 2017, в которую вставляется боковая направляющая основания катетера. Внизу скользящей канавки имеются натяжные винты для фиксации. Опорная плита стойки также снабжена разъемом для провода, который используется для подключения линии питания и линии связи.
Две поперечные перемычки стойки могут быть размещены на опорной плите катетера. Две поперечные перемычки совместно со скользящей канавкой направляющей, закрепленной на основания катетера стойки, образуют стабильную конструкцию, образованную тремя элементами. Таким образом обеспечивается стабильное соединение манипулятора и основания катетера. Высота стойки манипулятора подобрана таким образом, что гарантирует, что она не будет касаться пациента и не будет находиться слишком далеко от пациента.
Обращаясь к фиг. 8 - фиг. 12, в варианте осуществления изобретения манипулятор 203 включает в себя заднее плечо 2031, среднее плечо 2032 и переднее плечо 2033, соединенные с возможностью вращения поочередно. Один конец заднего плеча 2031 соединен с возможностью вращения с верхней частью стойки 202. Передний конец переднего плеча 2033 соединен с приводным механизмом 300 и камерой для дезинфекции 100. Передний конец переднего плеча 2033 удерживает приводной механизм 300 и камеру для дезинфекции 100. Каждое указанное выше вращающееся соединение снабжено кольцевым световым индикатором соответственно. Кольцевые световые индикаторы отображают разные цвета в соответствии с разными сигналами, отправляемыми схемой управления роботом, чтобы передавать различную информацию о состоянии робота. Манипулятор изготовлен из прочного и легкого алюминиевого сплава. Три прямых плеча изготовлены из полых алюминиевых профилей, что значительно снижает вес манипулятора.
Обращаясь к фиг. 8 - фиг. 10, в частности, заднее плечо 2031 и среднее плечо 2032 имеют одинаковую конструкцию, и оба включают в себя поперечный вал 20311, соединительный узел первого вращающегося вала 20312, узел фиксации вращающегося вала 20313 и первый вращающийся вал 20314. Соединительный узел первого вращающегося вала 20312 включает в себя соединитель первого вращающегося вала 203121, первый смазочный блок 203122, первый кронштейн 203123, первую прижимную резьбовую заглушку 203124 и втулку первого вала 203125. Один конец соединителя первого вращающегося вала 203121 зафиксирован с одним концом поперечного вала 20311. На соединителе первого вращающегося вала сформирована канавка для размещения первого смазочного блока 203122. Втулка первого вала 203125 проходит через сквозное отверстие посередине соединителя первого вращающегося вала 203121 и первого смазочного блока 203122. Два первых кронштейна 203123 для установки кольцевых световых индикаторов симметрично закреплены с обеих сторон соединителя первого вращающегося вала. 203121. Первая прижимная резьбовая заглушка 203124 закреплена на соединителе первого вращающегося вала 203121 для крепления кабелей; узел фиксации вращающегося вала 20313 включает в себя крепежную часть вращающегося вала 203131, прижимную пластину для проводов 203132, ограничительный элемент поперечного вала 203133, прижимное кольцо 203134 и Т-образную уплотнительную прокладку 203135. Один конец крепежной части вращающегося вала 203131 имеет вертикально расположенную стенку для фиксации другого конца поперечного вала 20311. Стенка выступает за поперечный вал 20311, образуя вертикально расположенный участок установки вала. Первый вращающийся вал 20314 устанавливается на участке установки вала с помощью болтов. Т-образная уплотнительная прокладка 203135 расположена между верхней частью фиксирующего посадочного места первого вращающегося вала 20314 и идентичной группой втулок первого вала 203125. Верхняя часть Т-образной уплотнительной прокладки 203135 фиксируется с помощью прижимного кольца 203134. Верхний участок крепежной части вращающегося вала 203131 снабжен прижимной пластиной для проводов 203132 для фиксации кабелей. Две группы ограничительных элементов поперечного вала 203133, предусмотренных с обеих сторон крепежной части вращающегося вала 203131, и упорный винт 203126, предусмотренный в нижней части соединителя первого вращающегося вала 203121, согласованный с ограничительными элементами поперечного вала 203133, образуют стопорный механизм для ограничения вращения поперечного вала 20311.
На фиг. 10 показана схема соединения заднего плеча и среднего плеча. В изобретении способ соединения заднего плеча и верхней части стойки, среднего плеча и переднего плеча такой же, как у заднего плеча и среднего плеча.
Обращаясь к фиг. 11, в частности, переднее плечо 2033 включает в себя переднюю поперечную пластину 20331, привод 20332, наклонную вертикальную пластину 20333, соединительный узел второго вращающегося вала 20334, узел соединительного вала переднего плеча 20335 и второй вращающийся вал 20336. Верхняя часть передней поперечной пластины 20331 соединена с приводом 20332 для приведения в действие шагового двигателя в приводном механизме 300, а один конец передней поперечной пластины 20331 жестко соединен с соединительным узлом второго вращающегося вала 20334 с помощью наклонной вертикальной пластины 20333. Внутренняя полость соединительного узла второго вращающего вала 20334 соединена с первым вращающимся валом 20314. Другой конец передней поперечной пластины 20331 прикреплен к узлу соединительного вала переднего плеча 20335. Второй вращающийся вал 20336 совмещен с узлом соединительного вала переднего плеча 20335 и соединен с приводным механизмом 300.
Обращаясь к фиг. 12, соединительный узел второго вращающегося вала 20334 включает в себя соединитель второго вращающегося вала 203341, второй смазочный блок 203342, втулку второго вала 203343 и второй кронштейн 203344. Один конец соединителя второго вращающегося вала 203341 закреплен в верхней части наклонной вертикальной пластины 20333 с помощью винта, а внутри соединителя второго вала 203341 сформирована удерживающая канавка для удерживания второго смазочного блока 203342. Втулка второго вала 203343 проходит через сквозное отверстие посередине соединителя второго вращающегося вала 203341 и второго смазочного блока 203342. Два вторых кронштейна 203344 закреплены на обеих сторонах соединителя второго вращающегося вала 203341 для установки кольцевого светового индикатора. Узел соединительного вала переднего плеча 20335 включает в себя опору вала 203351, третий смазочный блок 203352, фланцевый подшипник 203353, шайбу 203354 и стопорное кольцо второго вращающегося вала 203355. Опора вала 203351 закреплена на передней поперечной пластине 20331. Третий смазочный блок 203352 закреплен на одной стороне опоры вала 203351. Второй вращающийся вал 20336 закреплен на боковой стенке приводного механизма 300. Второй вращающийся вал 20336, шайба 203354, фланцевый подшипник 203353 и стопорное кольцо второго вращающегося вала 203355 совмещены и установлены на опоре вала 203351, так что приводной механизм 300 вращается вдоль опоры вала 203351. Приводной механизм 300 может вращаться вдоль опоры вала 203351, так что небольшое вращение может удовлетворить клинические потребности.
Обращаясь к фиг. 1 и фиг. 13, в других вариантах осуществления изобретения приводной механизм 300 включает в себя корпус 301, ведущий узел проволочного проводника 400, ведомый узел проволочного проводника 500 и управляющий концевой узел катетера 103. Одна сторона корпуса 301 соединена с возможностью вращения с манипулятором 203. Внутренняя часть корпуса 301 используется для поддержки и размещения ведущего узла проволочного проводника 400, ведомого узла проволочного проводника 500 и управляющего концевого узла катетера 103. Камера для дезинфекции 100 магнитно соединена с верхней частью корпуса 301. Верхняя часть управляющего концевого узла катетера 103 входит в камеру для дезинфекции 100. Ведущий узел проволочного проводника 400 и ведомый узел проволочного проводника 500 симметрично расположены вдоль проволочного проводника S. Сторона ведущего узла проволочного проводника 400, близкая к проволочному проводнику S, и сторона ведомого узла проволочного проводника 500, близкая к проволочному проводнику S, соединены с двумя группами направляющих узлов проволочного проводника 104, соответственно.
Обращаясь к фиг. 14 и фиг. 15, предпочтительно, ведущий узел проволочного проводника 400 включает в себя соединительную пластину ведущего узла и две группы ведущих концевых частей. Каждая группа ведущих концевых частей включает в себя U-образный паз соединителя 401, высокоточный тензодатчик ведущего узла 402, первый ползун 403, первую микролинейную направляющую 404, прямоугольную соединительную пластину 405 и соединительную деталь ведущего узла 409. Верхняя часть соединительной детали ведущего узла 409 скользит параллельно проволочному проводнику S в направлении длины соединительной пластины ведущего узла. Нижняя часть прямоугольной соединительной пластины 405 скользит перпендикулярно проволочному проводнику S по верхней части соединительной детали ведущего узла 409. Наружная часть вертикальной пластины, соединенной с одним концом прямоугольной соединительной пластины 405, стыкуется с распределительным валом Т, а верхняя часть другого концевого участка фиксируется с первой микролинейной направляющей 404, параллельной проволочному проводнику S. Первый ползун 403 скользит по первой микролинейной направляющей 404, а U-образный паз соединителя 401 закреплен на верхней части первого ползуна 403, чтобы противодействовать усилию зажима проволочного проводника S. Высокоточный тензодатчик ведущего узла 402 расположен перпендикулярно проволочному проводнику S. Один конец высокоточного тензодатчика ведущего узла 402 закреплен на внутренней стороне вертикальной пластины, а другой конец вставлен в U-образный паз соединителя 401, и ширина углубления паза больше, чем ширина высокоточного тензодатчика ведущего узла. 402. Высокоточный тензодатчик ведущего узла 402 используется для измерения трения проволочного проводника S. Сторона, удаленная от углубления U-образного паза соединителя 401 фиксируется с одним концом первой зажимной детали.
В изобретении приводная часть, расположенная с обеих сторон ведущего узла, приводит в движение ведущий узел проволочного проводника для перемещения вперед или назад относительно ведомого узла проволочного проводника в направлении, перпендикулярном направлению проталкивания проволочного проводника. Высокоточный тензодатчик, расположенный на соединительной пластине, передает сигнал изменения усилия, полученный в процессе поворота и зажима, на управляющий конец ведущего узла приводного механизма. Управляющий конец ведущего узла приводного механизма обнаруживает изменение усилия зажима, сравнивая изменение значения усилия обратной связи, и регулирует степень зажима проволочного проводника в соответствии с состоянием зажима, чтобы робот правильно прикладывал усилие зажима для завершения операции, и выполнения безопасной операции с высокой точностью. В то же время, когда усилие зажима выходит за пределы (слишком высокое значение или слишком малое значение), врач может получить своевременное сообщение через управляющий конец ведущего узла приводного механизма робота, и управляющий конец является предохранительным устройством и помогает врачу лучше выполнять интервенционную хирургическую операцию.
В изобретении точность высокоточного тензодатчика меньше или равна 0,01 Н.
Ведущий узел проволочного проводника дополнительно включает в себя второй ползун 406 и вторую микролинейную направляющую 407. Нижняя часть прямоугольной соединительной пластины 405 соединяется со вторым ползуном 406 вдоль вертикального направления проволочного проводника S, а верхняя часть соединительной детали ведущего узла 409 снабжена второй микролинейной направляющей 407, скользящей со вторым ползуном 406.
Ведущий узел проволочного проводника дополнительно включает в себя пружину и вставку из политетрафтора. Два конца пружины соответственно зацеплены и закреплены между внешней стороной вертикальной пластины и вставкой из политетрафтора. Вставка из политетрафтора всегда соединяется с распределительным валом T.
Обращаясь к фиг. 16 и фиг. 17, более предпочтительно, ведомый узел проволочного проводника 500 включает в себя соединительную пластину ведомого узла 501, высокоточный тензодатчик ведомого узла 502, микролинейную направляющую ведомого узла 503, ползун ведомого узла 504, соединительная деталь ведомого узла 505 и две группы ведомых подвижных частей 1041. Боковая поверхность соединительной пластины ведомого узла 501, расположенная рядом с проволочным проводником S, соединена с высокоточным тензодатчиком ведомого узла 502. Верхняя часть соединительной пластины ведомого узла 501 соединена с микролинейной направляющей ведомого узла 503. Две соединительные детали ведомого узла 505 закреплены на верхних частях двух ползунов ведомого узла 504 и скользят по микролинейной направляющей ведомого узла 503. Верхняя часть каждой соединительной детали ведомого узла 505 соединена с ведомой подвижной частью 1041, связанной с ведущей подвижной частью ведущего узла проволочного проводника 400, соответственно. Высокоточный тензодатчик ведомого узла 502 передает сигнал об изменении усилия, полученный в процессе поворота и зажима, на управляющий конец ведущего узла приводного механизма. При этом соединительная пластина ведомого узла 501 включает в себя нижнюю соединительную пластину и верхнюю соединительную пластину 5011. Нижняя соединительная пластина включает в себя неразъемно соединенные горизонтальную пластину и вертикальную пластину, а верхняя часть горизонтальной пластины снабжена первой пластиной крепления датчика на стороне, близкой к проволочному проводнику. Вторая пластина крепления датчика, расположенная в шахматном порядке относительно первой пластины крепления датчика, предусмотрена на стороне, близкой к проволочному проводнику в нижней части верхней соединительной пластины. Первая пластина крепления датчика и вторая пластина крепления датчика имеют одинаковый размер и снабжены первым монтажным отверстием. Высокоточный тензодатчик снабжен вторым монтажным отверстием, соответствующим положению первого монтажного отверстия. Первое монтажное отверстие и второе монтажное отверстие фиксируются болтами.
Конструкция ведущего узла в изобретении относительно проста, компактна и устойчива. Когда подвижная часть подвергается усилию в направлении зажима проволочного проводника, усилие передается на прямоугольную соединительную пластину через U-образный паз соединителя, первый ползун и первую микролинейную направляющую. Высокоточный тензодатчик ведущего узла измеряет только осевое усилие проволочного проводника, то есть усилие сжатия-растяжения, считываемое высокоточным тензодатчиком, то есть трение проволочного проводника, чтобы оценить изменение усилия осевого трения проволочного проводника. Это обеспечивает врача своевременной информацией об операции и обеспечивает безопасность пациентов. В изобретении используют метод косвенного измерения усилия и решают проблему неудобства установки проволочного проводника и устройства измерения усилия.
В настоящем изобретении ведущий узел, ведомый узел и направляющий узел проволочного проводника имеют левую и правую стороны, их формы, размеры и функции одинаковы, но они работают в разных положениях и в разные моменты времени. Устройство используется на приводном механизме, совершающем возвратно-поступательное движение, и имеет две группы зажимных деталей для зажима проволочного проводника. При взаимодействии распределительного вала и группы зубчатой передачи (конструкция группы зубчатой передачи показана в патенте 201911259494.4) два соединительных стержня в группе зубчатой передачи соответственно соединяются с двумя группами ведущих концов соединительных элементов для приведения в действие двух групп ведущих концевых частей для скольжения вдоль прямоугольной нижней пластины, а затем для зажима и проталкивания зажимных частей ведущих концевых частей. На распределительном валу предусмотрены четыре кулачка, причем кулачки имеют определенную разницу углов, чтобы гарантировать, что в одно и то же время только одна группа кулачков толкает ведущую концевую часть, заставляя зажим проволочного проводника зажимать проволочный проводник. Следовательно, только когда проволочный проводник зажат, устройство обратной связи по усилию (высокоточный тензодатчик) может получить сигнал, а когда проволочный проводник ослаблен, ему не нужно фиксировать сигнал датчика. Ведомый подвижный блок на ведомом узле приводного механизма применяется для облегчения натяжения проволочного проводника. Вставка из политетрафтора приклеивается к прямоугольной соединительной пластине. Под действием пружины вставка из политетрафтора всегда соприкасается с распределительным валом. Когда группа ведущих подвижных блоков и ведомых подвижных блоков зажимает проволочный проводник, а первый электромагнит воспринимает усилие в направлении зажима проволочного проводника, усилие передается на прямоугольную соединительную пластину через U-образный паз соединителя, первый ползун и первую микролинейную направляющую. Высокоточный тензодатчик измеряет только усилие в осевом направлении проволочного проводника, то есть трение проволочного проводника.
Устройство обратной связи по трению проволочного проводника для интервенционного хирургического робота используется вместе с устройством возвратно-поступательного движения интервенционного хирургического робота. Два набора зажимных частей поочередно зажимают и перемещают проволочный проводника во время возвратно-поступательного движения проволочного проводника. Усилие трения при движении проволочного проводника измеряется путем обнаружения сигнала изменения усилия от высокоточного тензодатчика для косвенного измерения усилия на конце проволочного проводника. Данные передаются на управляющий конец ведущего узла приводного механизма робота, чтобы своевременно сообщать врачу.
Во время процесса поворота и зажима высокоточный тензодатчик получает значение изменение усилия и подает его обратно на управляющий конец приводного механизма, а управляющий конец приводного механизма определяет усилие зажима, сравнивая изменение значения усилия обратной связи, и регулирует приводную часть для изменения усилия зажима в соответствии с потребностями использования. Точность высоточного тензодатчика меньше или равна 0,01 Н. Высокоточный тнзодатчик имеет подходящий размер и высокую чувствительность. Когда подвижный блок зажимает проволочный проводник, высокоточный тензодатчик может измерить небольшое изменение при перемещении каждого элемента. На управляющем конце ведущего узла приводного механизма усилие зажима определяется путем сравнения изменения числового значения высокоточного тензодатчика. Два конца высокоточного тензодатчика соответственно прикреплены к верхней соединительной пластине и нижней соединительной пластине, при этом верхняя соединительная пластина снабжена приводной микролинейной направляющей и двумя электромагнитами на концах, а нижняя соединительная пластина фиксируется через направляющие и корпус. Ведущий узел, зажимающий проволочный проводник, согласован с высокоточным тензодатчиком, чтобы реализовать действие шагового двигателя, чтобы можно было контролировать усилие зажима проволочного проводника. То есть двигатель вращается вперед, ведущий узел движется вперед в целом, и подвижный блок, притягиваемый электромагнитом на ведущем узле, приводится в движение вперед, и подвижный блок находится близко к подвижному блоку ведомого узла, поэтому усилие зажима проволочного проводника увеличивается. И наоборот, двигатель меняет направление вращения, и усилие зажима уменьшается.
Устройство управления усилием зажима проволочного проводника может регулировать усилие зажима после размещения проволочного проводника. Значение усилия зажима может быть установлено пользователем и может регулироваться в соответствии с реальной ситуацией. Кроме того, изменение усилия зажима можно наблюдать в любой момент во время работы и также можно регулировать в любое время, когда это необходимо, так что зажимное устройство является более гибким при практическом использовании.
Поворотная часть изобретения относится к патенту CN201911213936.1.
Таким образом, в изобретении решаются проблемы, существующие в известном роботе для интервенционной хирургии, такие как невозможность совершения двух процессов интервенционной хирургии одновременно, отсутствие возможности определения усилия осевого трения проволочного проводника, сложность установки устройства определения усилия, неспособность удовлетворить клинические потребности, сложная конструкция робота для проведения реальной операции, большой объем устройства и т. д. Изобретение раскрывает робот, имитирующий попеременную работу рук врача. Робот может удовлетворить потребности как ангиографической хирургии, так и терапевтической хирургии, что значительно способствует его применению в клинической практике. Робот обладает следующими преимуществами: простая конструкция, хорошая устойчивость, модульная структура, простая сборка и демонтаж, компактная конструкция, занимающая малый объем, что удобно для использования в операционной. Измеряя усилие сжатия и растяжения микродатчиком усилия на ведущем узле, можно судить об изменении усилия осевого трения проволочного проводника, что может дать врачу своевременную информацию об операции и обеспечивает безопасность пациентов. В соответствии со значением усилия обратной связи высокоточного тензодатчика на ведомом узле степень зажима проволочного проводника можно отрегулировать в любое время, чтобы исключить отклонение инструмента, что может удовлетворить потребности интервенционной сосудистой хирургии.
В описании настоящего изобретения ссылка на термины «один вариант осуществления», «некоторые варианты осуществления», «пример», «конкретный пример» или «некоторые примеры» или тому подобное предназначена для обозначения характерных особенностей, конструкции, материалов или признаков, которые включены, по меньшей мере, в один вариант осуществления или пример раскрытия изобретения. В описании схематические представления вышеуказанных терминов не обязательно относятся к одним и тем же вариантам осуществления или примерам. Более того, описанные характерные особенности, конструкции, материалы или признаки могут быть объединены в любом одном или нескольких вариантах осуществления или примерах надлежащим образом. Кроме того, специалисты в данной области техники могут объединить различные варианты осуществления или примеры, описанные в этом описании.
Следует понимать, что описанные выше варианты осуществления являются примерными и не должны рассматриваться как ограничение объема изобретения. Вариации, модификации и замены вышеописанных вариантов осуществления могут быть сделаны специалистом в данной области техники в пределах объема настоящего изобретения.
Изобретение относится к медицине, а именно к роботам для интервенционной ангиографической хирургии и интервенционной терапевтической хирургии. Корпус робота включает в себя основание, стойку и манипулятор. Стойка соединена с верхней частью основания с возможностью скольжения. Верхняя часть стойки соединена с манипулятором. Передний конец манипулятора соединен с приводным механизмом и камерой для дезинфекции. Передний конец манипулятора выполнен с возможностью удержания приводного механизма и камеры для дезинфекции. Камера для дезинфекции включает в себя корпус стерильной камеры и крышку стерильной камеры, шарнирно прикрепленную к одной стороне корпуса стерильной камеры. Управляющий концевой узел катетера и направляющий узел проволочного проводника закреплены в корпусе стерильной камеры. На одном концевом участке корпуса стерильной камеры предусмотрен узел Y-образного клапана. Узел Y-образного клапана включает в себя фиксирующий элемент Y-образного клапана, удерживающий элемент Y-образного клапана, основной корпус Y-образного клапана и приводную шестерню Y-образного клапана. Достигается возможность применения робота одновременно для интервенционной ангиографической хирургии и интервенционной терапевтической хирургии. 9 з.п. ф-лы, 17 ил.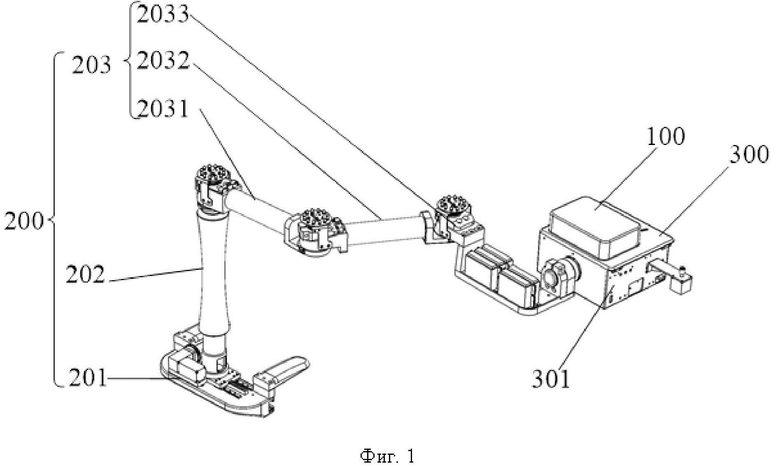
1. Универсальный робот для интервенционной ангиографической хирургии и интервенционной терапевтической хирургии, включающий корпус робота (200), при этом корпус робота (200) включает в себя основание (201), стойку (202) и манипулятор (203); стойка (202) соединена с верхней частью основания (201) с возможностью скольжения; верхняя часть стойки (202) соединена с манипулятором (203); передний конец манипулятора (203) соединен с приводным механизмом (300) и камерой для дезинфекции (100); передний конец манипулятора (203) выполнен с возможностью удержания приводного механизма (300) и камеры для дезинфекции (100);
камера для дезинфекции (100) включает в себя корпус стерильной камеры (101) и крышку стерильной камеры (102), шарнирно прикрепленную к одной стороне корпуса стерильной камеры (101); управляющий концевой узел катетера (103) и направляющий узел проволочного проводника (104) закреплены в корпусе стерильной камеры (101); на одном концевом участке корпуса стерильной камеры (101) предусмотрен узел Y-образного клапана (105); узел Y-образного клапана (105) включает в себя фиксирующий элемент Y-образного клапана (1051), удерживающий элемент Y-образного клапана (1052), основной корпус Y-образного клапана (1053) и приводную шестерню Y-образного клапана (1054); один концевой участок фиксирующего элемента Y-образного клапана (1051) выполнен с возможностью поворота на одном концевом участке корпуса стерильной камеры (101) в направлении продвижения катетера и проволочного проводника (S); другой концевой участок фиксирующего элемента Y-образного клапана (1051) магнитно связан с корпусом стерильной камеры (101); в середине фиксирующего элемента Y-образного клапана (1051) предусмотрено сквозное отверстие для зацепления (10511); в корпусе стерильной камеры (101) выполнено отверстие вала (1011), положение которого соответствует сквозному отверстию для зацепления (10511); нижняя часть оси приводной шестерни Y-образного клапана (1054) выполнена с возможностью вращения в отверстии вала (1011), и нижняя часть оси снабжена осевой шестерней, зацепленной с выходной шестерней привода (302) в приводном механизме; приводная шестерня Y-образного клапана (1054) предусмотрена в сквозном отверстии для зацепления (10511); удерживающий элемент Y-образного клапана (1052) включает в себя, по меньшей мере, два набора дугообразных элементов, соединяемых с образованием кольцевого элемента; на кольцевом элементе предусмотрено зубчатое кольцо (10521), входящее в зацепление с приводной шестерней Y-образного клапана (1054); один конец основного корпуса Y-образного клапана (1053) закреплен в удерживающем элементе Y-образного клапана (1052) через эластичный наполнитель, а другой конец основного корпуса Y-образного клапана (1053) закреплен на фиксирующем элементе Y-образного клапана (1051).
2. Универсальный робот для интервенционной ангиографической хирургии и интервенционной терапевтической хирургии по п.1, отличающийся тем, что фиксирующий элемент Y-образного клапана (1051) включает в себя крепежную пластину (10512), корпус захватного кольца (10513), шарнир (10515) и зажим (10514); крепежная пластина (10512) имеет форму бруска; нижняя часть одного концевого участка крепежной пластины (10512) магнитно соединена с корпусом стерильной камеры (101); другой концевой участок крепежной пластины (10512) соединен с одним концевым участком корпуса захватного кольца (10513) как единое целое; посередине корпуса захватного кольца (10513) выполнено сквозное отверстие для зацепления (10511); другой концевой участок корпуса захватного кольца (10513) соединен с шарниром (10515); шарнир (10515) шарнирно соединен с шарнирным блоком (1012), предусмотренным на корпусе стерильной камеры (101); вдоль продольного направления крепежной пластины (10512) расположены, по меньшей мере, два зажима (10514); другой концевой участок основного корпуса Y-образного клапана (1053) выполнен с возможностью контакта с зажимом (10514).
3. Универсальный робот для интервенционной ангиографической хирургии и интервенционной терапевтической хирургии по п.1, отличающийся тем, что основание (201) включает опорную плиту стойки (2011), стопор (2012), поперечную перемычку (2013), направляющую основания (2014), ползун основания (2015) и зубчатую рейку (2016); стопоры (2012) закреплены на опорной плите стойки (2011); поперечные перемычки (2013) выполнены с возможностью фиксации стопором (2012) и размещены в основании катетера; на верхней части опорной плиты стойки (2011) установлена зубчатая рейка (2016), расположенная в продольном направлении опорной плиты стойки (2011); две направляющие основания (2014) расположены симметрично с обеих сторон зубчатой рейки (2016), и каждая направляющая основания (2014) соединена с ползунами основания (2015) с возможностью скольжения; нижняя часть стойки (202) снабжена соединительной пластиной (2021); нижняя часть соединительной пластины (2021) закреплена на ползунах основания (2015), а верхняя часть соединительной пластины (2021) соединена с серводвигателем основания (2022); выходной конец серводвигателя основания (2022) снабжен шестерней основания (2023), находящейся в зацеплении с зубчатой рейкой (2016).
4. Универсальный робот для интервенционной ангиографической хирургии и интервенционной терапевтической хирургии по п.3, отличающийся тем, что сторона опорной плиты стойки (2011), прилегающая к поперечной перемычке (2013), снабжена скользящей канавкой (2017), в которую установлена боковая направляющая основания катетера.
5. Универсальный робот для интервенционной ангиографической хирургии и интервенционной терапевтической хирургии по п.3, отличающийся тем, что манипулятор (203) включает в себя заднее плечо (2031), среднее плечо (2032) и переднее плечо (2033), соединенные с возможностью вращения поочередно; один конец заднего плеча (2031) соединен с возможностью вращения с верхней частью стойки (202); передний конец переднего плеча (2033) соединен с приводным механизмом (300) и камерой для дезинфекции (100); передний конец переднего плеча (2033) удерживает приводной механизм (300) и камеру для дезинфекции (100); каждое указанное выше вращающееся соединение снабжено кольцевым световым индикатором соответственно; и кольцевые световые индикаторы отображают разные цвета в соответствии с разными сигналами, отправляемыми схемой управления роботом, для передачи различной информации о состоянии робота.
6. Универсальный робот для интервенционной ангиографической хирургии и интервенционной терапевтической хирургии по п.5, отличающийся тем, что заднее плечо (2031) и среднее плечо (2032) имеют одинаковую конструкцию, и оба включают в себя поперечный вал (20311), соединительный узел первого вращающегося вала (20312), узел фиксации вращающегося вала (20313) и первый вращающийся вал (20314); соединительный узел первого вращающегося вала (20312) включает в себя соединитель первого вращающегося вала (203121), первый смазочный блок (203122), первый кронштейн (203123), первую прижимную резьбовую заглушку (203124) и втулку первого вала (203125); один конец соединителя первого вращающегося вала (203121) зафиксирован с одним концом поперечного вала (20311); на соединителе первого вращающегося вала сформирована канавка для размещения первого смазочного блока (203122); втулка первого вала (203125) проходит через сквозное отверстие посередине соединителя первого вращающегося вала (203121) и первого смазочного блока (203122); два первых кронштейна (203123) для установки кольцевых световых индикаторов симметрично закреплены с обеих сторон соединителя первого вращающегося вала (203121); первая прижимная резьбовая заглушка (203124) закреплена на соединителе первого вращающегося вала (203121) для крепления кабелей; узел фиксации вращающегося вала (20313) включает в себя крепежную часть вращающегося вала (203131), прижимную пластину для проводов (203132), ограничительный элемент поперечного вала (203133), прижимное кольцо (203134) и Т-образную уплотнительную прокладку (203135); один конец крепежной части вращающегося вала (203131) имеет вертикально расположенную стенку для фиксации другого конца поперечного вала (20311); стенка выступает за поперечный вал (20311), образуя вертикально расположенный участок установки вала; первый вращающийся вал (20314) установлен на участке установки вала с помощью болтов; Т-образная уплотнительная прокладка (203135) расположена между верхней частью фиксирующего посадочного места первого вращающегося вала (20314) и идентичной группой втулок первого вала (203125); верхняя часть Т-образной уплотнительной прокладки (203135) зафиксирована с помощью прижимного кольца (203134); верхний участок крепежной части вращающегося вала (203131) снабжен прижимной пластиной для проводов (203132) для фиксации кабелей; две группы ограничительных элементов поперечного вала (203133), предусмотренных с обеих сторон крепежной части вращающегося вала (203131), и упорный винт (203126), предусмотренный в нижней части соединителя первого вращающегося вала (203121), согласованный с ограничительными элементами поперечного вала (203133), образуют стопорный механизм для ограничения вращения поперечного вала (20311).
7. Универсальный робот для интервенционной ангиографической хирургии и интервенционной терапевтической хирургии по п.6, отличающийся тем, что переднее плечо (2033) включает в себя переднюю поперечную пластину (20331), привод (20332), наклонную вертикальную пластину (20333), соединительный узел второго вращающегося вала (20334), узел соединительного вала переднего плеча (20335) и второй вращающийся вал (20336); верхняя часть передней поперечной пластины (20331) соединена с приводом (20332) для приведения в действие шагового двигателя в приводном механизме (300), а один конец передней поперечной пластины (20331) жестко соединен с соединительным узлом второго вращающегося вала (20334) с помощью наклонной вертикальной пластины (20333); внутренняя полость соединительного узла второго вращающегося вала (20334) соединена с первым вращающимся валом (20314); другой конец передней поперечной пластины (20331) прикреплен к узлу соединительного вала переднего плеча (20335); второй вращающийся вал (20336) совмещен с узлом соединительного вала переднего плеча (20335) и соединен с приводным механизмом (300).
8. Универсальный робот для интервенционной ангиографической хирургии и интервенционной терапевтической хирургии по п.7, отличающийся тем, что соединительный узел второго вращающегося вала (20334) включает в себя соединитель второго вращающегося вала (203341), второй смазочный блок (203342), втулку второго вала (203343) и второй кронштейн (203344); один конец соединителя второго вращающегося вала (203341) закреплен в верхней части наклонной вертикальной пластины (20333) с помощью винта, а внутри соединителя второго вала (203341) сформирована удерживающая канавка для удерживания второго смазочного блока (203342); втулка второго вала (203343) проходит через сквозное отверстие посередине соединителя второго вращающегося вала (203341) и второго смазочного блока (203342); два вторых кронштейна (203344) закреплены на обеих сторонах соединителя второго вращающегося вала (203341) для установки кольцевого светового индикатора; узел соединительного вала переднего плеча (20335) включает в себя опору вала (203351), третий смазочный блок (203352), фланцевый подшипник (203353), шайбу (203354) и стопорное кольцо второго вращающегося вала (203355); опора вала (203351) закреплена на передней поперечной пластине (20331); третий смазочный блок (203352) закреплен на одной стороне опоры вала (203351); второй вращающийся вал (20336) закреплен на боковой стенке приводного механизма (300); второй вращающийся вал (20336), шайба (203354), фланцевый подшипник (203353) и стопорное кольцо второго вращающегося вала (203355) совмещены и установлены на опоре вала (203351), так что приводной механизм (300) имеет возможность вращения относительно опоры вала (203351).
9. Универсальный робот для интервенционной ангиографической хирургии и интервенционной терапевтической хирургии по п.1, отличающийся тем, что приводной механизм (300) включает в себя корпус (301), ведущий узел проволочного проводника (400), ведомый узел проволочного проводника (500) и управляющий концевой узел катетера (103); одна сторона корпуса (301) соединена с возможностью вращения с манипулятором (203); внутренняя часть корпуса (301) выполнена для поддержки и размещения ведущего узла проволочного проводника (400), ведомого узла проволочного проводника (500) и управляющего концевого узла катетера (103); камера для дезинфекции (100) магнитно соединена с верхней частью корпуса (301); верхняя часть управляющего концевого узла катетера (103) соединена с камерой для дезинфекции (100); ведущий узел проволочного проводника (400) и ведомый узел проволочного проводника (500) симметрично расположены вдоль проволочного проводника (S); сторона ведущего узла проволочного проводника (400), близкая к проволочному проводнику (S), и сторона ведомого узла проволочного проводника (500), близкая к проволочному проводнику (S), соединены с двумя группами направляющего узла проволочного проводника (104), соответственно.
10. Универсальный робот для интервенционной ангиографической хирургии и интервенционной терапевтической хирургии по п.1, отличающийся тем, что ведущий узел проволочного проводника (400) включает в себя соединительную пластину ведущего узла и две группы ведущих концевых частей; каждая группа ведущих концевых частей включает в себя U-образный паз соединителя (401), тензодатчик ведущего узла (402), первый ползун (403), первую микролинейную направляющую (404), прямоугольную соединительную пластину (405) и соединительную деталь ведущего узла (409); верхняя часть соединительной детали ведущего узла (409) выполнена с возможностью скольжения параллельно проволочному проводнику (S) в направлении длины соединительной пластины ведущего узла; нижняя часть прямоугольной соединительной пластины (405) выполнена с возможностью скольжения перпендикулярно проволочному проводнику (S) по верхней части соединительной детали ведущего узла (409); наружная часть вертикальной пластины, соединенной с одним концом прямоугольной соединительной пластины (405), состыкована с распределительным валом (Т), а верхняя часть другого концевого участка зафиксирована с первой микролинейной направляющей (404), параллельной проволочному проводнику (S); первый ползун 403 выполнен с возможностью скольжения по первой микролинейной направляющей (404), а U-образный паз соединителя (401) закреплен на верхней части первого ползуна (403), чтобы противодействовать усилию зажима проволочного проводника (S); тензодатчик ведущего узла (402) расположен перпендикулярно проволочному проводнику (S); один конец тензодатчика ведущего узла (402) закреплен на внутренней стороне вертикальной пластины, а другой конец вставлен в U-образный паз соединителя (401), и ширина углубления паза больше, чем ширина тензодатчика ведущего узла (402); тензодатчик ведущего узла (402) выполнен с возможностью использования для измерения трения проволочного проводника (S); сторона, удаленная от углубления U-образного паза соединителя (401), зафиксирована с одним концом первой зажимной детали;
ведомый узел проволочного проводника (500) включает в себя соединительную пластину ведомого узла (501), тензодатчик ведомого узла (502), микролинейную направляющую ведомого узла (503), ползун ведомого узла (504), соединительную деталь ведомого узла (505) и две группы ведомых подвижных частей (1041); боковая поверхность соединительной пластины ведомого узла (501) соединена с тензодатчиком ведомого узла (502); верхняя часть соединительной пластины ведомого узла (501) соединена с микролинейной направляющей ведомого узла (503); две соединительные детали ведомого узла (505) закреплены на верхних частях двух ползунов ведомого узла (504) и скользят по микролинейной направляющей ведомого узла (503); верхняя часть каждой соединительной детали ведомого узла (505) соединена с ведомой подвижной частью (1041), связанной с ведущей подвижной частью ведущего узла проволочного проводника (400), соответственно; динамометрический датчик ведомого узла (502) выполнен с возможностью передачи сигнала об изменении усилия, полученного в процессе вращения и зажима, на управляющий конец ведущего узла приводного механизма.
| CN 110811844 A, 21.02.2020 | |||
| АССИСТИРУЮЩИЙ ХИРУРГИЧЕСКИЙ КОМПЛЕКС | 2020 |
|
RU2720830C1 |
| CN 104840257 B, 13.04.2018 | |||
| US 8317744 B2, 27.11.2012 | |||
| US 20170143436 A1, 25.05.2017 | |||
| CN 108704214 A, 26.10.2018. | |||

