Изобретение относится к ко ггрольно- изм ительной техник а именно к KDHOтрукции устройств для определения координатЫ положения объекта.
Известно устройство для определения координаты положения объекта, содержа. щее фотоприе шую матрицу и схему регистрации р..
Это устройство является по своей техничеекой сущности наиболее близким изоб- ретению.
Недостаток известной конструкции состоит в сравнительно невысокой точности, обусловленной влиянием промежутков между светочувствительными частями фотоприемников.
Цель изобретения - повышение точнооти и определения координаты положения объекта.
Это достигается за счет того, что каждый ряд фотопрвемников матрицы смешен по оггношению к соседнему ряду на расстояние, не превышающее расстояние между двумя соседними фотоприемникамн в данном ряду.
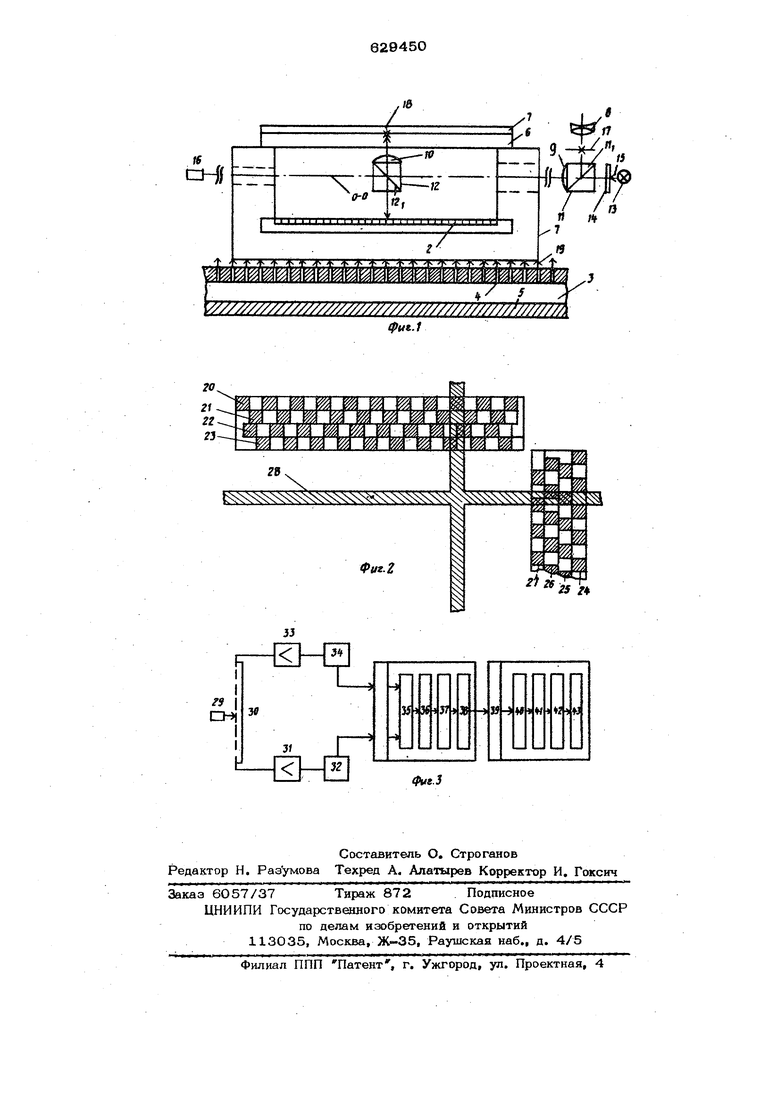
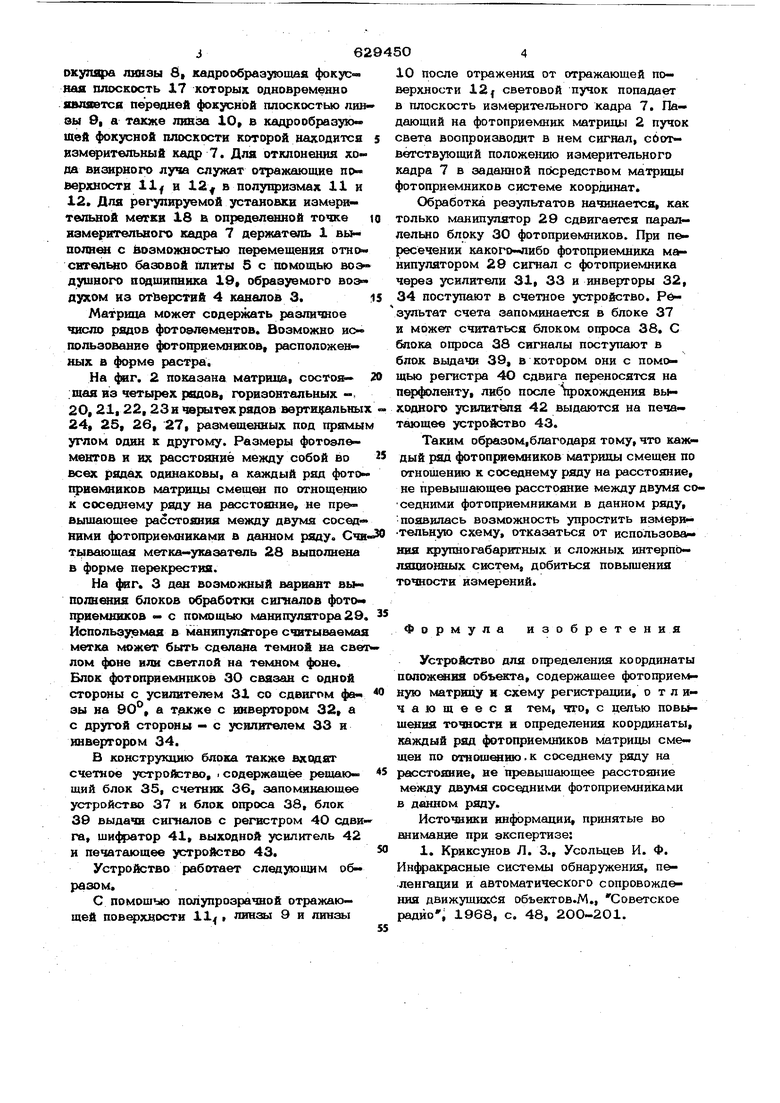
На фкг. 1 на)бражено устройство, вид сбоку} на , 2 - размещение фотоприем- ников; На фкг, 3 - структурная схема обработки результатов измерение.
Устройство для определения коорднваты положения объекта содержит держатель 1, оборудованный выполн шой на кнтег ральных элементах матрицей фотогфиемня- ков. 2, и схему регистрации.
Держатель 1 расположен на снабженной системой воздушных каналов 3 с от верстиями 4 базовой плите 5. Схема регистрации включает прозрачный носитель кадра 6, измерительный кадр 7 и сост1 яшую иэ трех линз 8, 9, 10 и двух полупризм 11 12 опти шскую систему, связанную с базовой плитой 5. Линзы 8, 9 Ю жестко закреплены на полупризмах 11 или 12. К ИСТОЩ1ВКУ света 13 подсоединены матовое стекло 14 и бленда 15. Бленда 15 как в источник излучения 16 расположена коаксиально с оптической осью О-О рптической сиспгемы.
Для рассмотрения измерительного кадра 7 служат используемые в качестве окзпифа линзы S, кадроо6раэу ошв& фокус- пая плоскость 17 которых одновременно ошшетсв перепней фокусной плоскостью лш 8ы 9, а также ливэа 10, в кадрообразую щей фокусной плоскости которой находится взм ительный кадр 7. Для отклонения хода внзнрного луча служат отражаюише поверхностЕ 11 f и 12 f в полущзизмах 11 и 12. Для регулируемой установки измерв тельной мепгкв 18 а определенной точке нзмерительвого кадра 7 держатель 1 выгаопяек с возможностью перемещения отно сигелыю базовой плиты 5 с помощью воз душного подшипника 19, образуемого воз духом из отверстий 4 каналов 3. Матрица может содержать различное число рядов фотоэлементов. Возможно ис пош зование фотоприемннков, расположен- ных в форме растра. На 4вг. 2 показана матрица, состоя :шая из четырех радов, горизонтальных -, 2О, 21, 22, 23 и чврытех рядов ввртщальны 24, 25, 26, 27, размещенных под прямы углом один к другому. Размеры фотоэл&ментов и их расстояние между собой во всех рядах одинаковы, а каждый ряд фото приемников матрицы смешен по отнощению к соседнему ряду на расстояние, не превыщаюшее расстояния между двумя сосед- ними фотоприемниками в данном ряяу- Счн тываюшая метка-указатель 28 выполнена в форме перекрестия. На фаяг. 3 дан возможный вариант вы полышия блоков обработки сигналов фото приемников - с помощью манипулятора 29 Использу емая в манипуляторе считываемая метка может быть сделана темной на свет лом фоне или светлой на темном фоне. Блок фотоприемников ЗО связан с одной стороны с усилителем 31 со сдвигом фа зы на 9О°, а т.акже с инвертором 32, а с другой стороны - с усилителем 33 и инвертором 34. В конструкцию блока также входят счетное устройство, содержащее рещаю щий блок 35, счетник 36, запоминающее устройство 37 к блок опроса 38, блок 39 выдачи сигналов с регш:тром 40 сдвига, шифратор 41, выходной усилитель 42 и печатающее устройство 43. Устройство работает следующим образом. С помошыо полупрозрачной отражающей повет)хности 11/ линзы 9 и линзы 10 после отражения от отражающей поверхности 121 световой пучок попадает в плоскость иам ительного кадра 7. Падающий на фотоприемник матрицы 2 пучок света воспроизводит в нем сигнал, сбответствующий положению измерительного кадра 7 в заданной посредством матрицы фотоприемников системе координат. Обработка результатов начинается, как только манипулятор 29 сдвигается параллельно блоку 30 фотоприемников. При пересечении какого-либо фотоприемника манипулятором 29 сигнал с фотоприемника через усилители 31, 33 и инверторы 32, 34 поступают в счетное устройство. Р зультат счета запоминается в блоке 37 и может считаться блоком опроса 38. С блока опроса 38 сигналы поступают в блок выдачи 39, в котором они с помощью регистра 4О сдвига переносятся на перфоленту, либо после прохождения выходного усилителя 42 выдаются на печатающее устройство 43. Таким образом,благодаря тому, что кажр дый ряд фотоприемииков матрицы смещен по отношению к соседнему ряду на расстояние, не превышающее расстояние между двумя соседними фотоприемниками в данном ряду, появилась возможность упростить изм ительную схему, отказаться от использова ния крупногабаритных и сложных интерполяционных систем, добиться повышения тошости измерений. Формула изобретения Уст1К йство для определения координаты положения объекта, содержашее фотогфиел кую матрицу и схему регистрации, отличающееся тем, что, с цепью повьншения точности и определения координаты, каждый ряд фотоприемников матрицы смещен по отношению.к соседнему ряду на расстояние, не прювышающее расстояние между двумя соседними фотоприемниками в данном ряду. Источники информации, принятые во внимание при экспертизе: 1. Криксунов Л. 3., Усольцев И. Ф. Ин4 акрасиые системы обнаружения, п&ленгации и автоматического сопровожд&ния движущихся объектОВ.М., Советское радйо 1968, с. 48, 2ОО-201.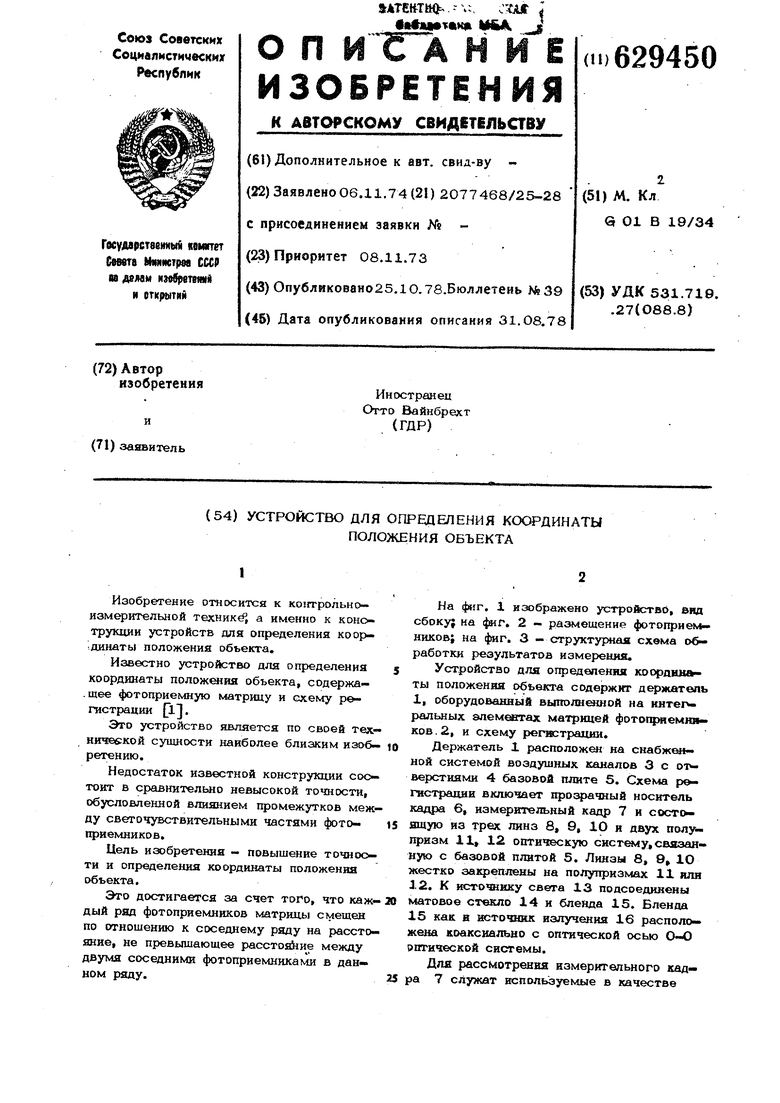
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ДИСТАНЦИОННОГО УПРАВЛЕНИЯ | 1996 |
|
RU2105344C1 |
| КОРАБЕЛЬНАЯ ОПТИЧЕСКАЯ СИСТЕМА ПОСАДКИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 1993 |
|
RU2083443C1 |
| ТЕПЛОПЕЛЕНГАТОР | 2016 |
|
RU2604959C1 |
| Акустооптический спектроанализатор | 1986 |
|
SU1355939A1 |
| Углоизмерительный прибор | 2018 |
|
RU2682842C1 |
| СПОСОБ АНИЗОТРОПНОЙ РЕГИСТРАЦИИ СВЕТОВОГО ПОЛЯ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2022 |
|
RU2790049C1 |
| Устройство для определения отклонения проходческого щита относительно проектной оси тоннеля | 1983 |
|
SU1125375A1 |
| Способ получения непрерывного стереоизображения земной поверхности с движущегося носителя | 2018 |
|
RU2686513C1 |
| ПРОГРАММИРУЕМЫЙ ОПТИЧЕСКИЙ ДАТЧИК ПЕРЕМЕЩЕНИЯ И СПОСОБ ИЗМЕРЕНИЯ СДВИГА С АВТОМАТИЧЕСКОЙ КОРРЕКЦИЕЙ ПОГРЕШНОСТИ ИЗМЕРЕНИЯ | 2018 |
|
RU2711244C2 |
| Лазерный измеритель скорости объекта | 1991 |
|
SU1780016A1 |