Изобретение относится к области систем управления и регулирования и может быть использовано для дистанционного управления бытовыми электроприборами, например освещением, телевизором, стереофонической системой, телекамерами охранной системы и т.п.
Известен способ дистанционного управления, включающий задание характера управляющих воздействий путем кодирования управляющего сигнала пакетами импульсов с заданными параметрами и задание интенсивности управляющих воздействий по длительности передачи кодирования импульса [1].
Недостатком известного способа являются, его узкие функциональные возможности, поскольку пульт управления, например, для телевизора не пригоден для управления стереофонической системой или освещением в комнате.
Наиболее близким по технической сущности и достигаемому эффекту является принимаемый за прототип способ дистанционного управления бытовыми электроприборами, в частности стереофонической системой, в которой автоматически поддерживается баланс усиления звука при произвольном изменении положения слушателя. При осуществлении способа положение слушателя определяют по пространственным координатам связанного с телом слушателя излучателя, а затем по полученным пространственным координатам формируют управляющее воздействие на объект управления [2].
Недостатком прототипа является невозможность при автоматической поддержке баланса усиления звука от различных громкоговорителей учесть индивидуальные свойства слушателя, т.е. невозможность осуществления управления командного типа, а также узость функциональных возможностей, поскольку при осуществлении дистанционного управления по прототипу можно управлять только каким-либо одним электроприбором.
Целью изобретения является осуществление возможности последовательного командного управления с одного дистанционного пульта управления несколькими электроприборами.
Для осуществления заявленного способа дистанционного управления определяют пространственные координаты связанных с телом оператора оптических излучателей и по полученным пространственным координатам формируют управляющее воздействие на объект управления.
В отличие от прототипа оптические излучателя устанавливают на дистанционном пульте управления, при этом один из оптических излучателей выполняют первичным с регулируемыми параметрами излучения. При осуществлении способа пользователь имеет возможность выбрать объект управления, причем выбор объекта управления пользователь проводит с дистанционного пульта управления по параметрам излучения первичного оптического излучателя с регулируемыми параметрами излучения. Объектами управления пользователя могут быть аудиостереосистема, телевизор, охранная система и т.д.
Изменением пространственного положения дистанционного пульта управления пользователь устанавливает направление и интенсивность управляющего воздействующего на выбранный объект управления.
Для определения пространственного положения дистанционного пульта управления получают двумерное действительное оптическое изображение области его вероятного расположения с проекциями на нем оптических излучателей и по расположению проекций оптических излучателей на двумерном действительном оптическом изображении определяют пространственное положение дистанционного пульта управления. Направление и интенсивность управляющего воздействия определяют по векторной величине разности пространственных координат оптических излучателей в момент выбора объекта управления и в текущий момент.
Наряду с первичным оптическим излучателем с регулируемыми параметрами излучения на дистанционном пульте управления могут быть установлены вторичные оптические излучатели, а для определения пространственного положения вторичных оптических излучателей, следовательно, и дистанционного пульта управления необходимо осуществлять оптическое зондирование области его вероятного расположения.
Под термином "первичный оптический излучатель" в данной заявке понимается оптический излучатель, который сам является активным источником этого излучения.
Под термином "вторичный оптический излучатель" в данной заявке понимается оптический излучатель, который сам не является активным источником этого излучения, а отражает излучение, полученное извне.
Изобретение позволяет пользователю непосредственно из места своего расположения с помощью простого в обращении малогабаритного дистанционного пульта управления управлять различными бытовыми электроприборами, создавая себе наиболее комфортные условия, в том числе:
- управлять поворотом и наклоном телевизора, чтобы обеспечить условия наилучшего наблюдения телеизображения;
- подстраивать звуковую стереосистему для получения наилучшего стереофонического эффекта;
- управлять положением оси (направлением) и силой струи вентилятора;
- управлять освещенностью в помещении;
- управлять видеокамерой охранного устройства;
- отпирать и запирать входную дверь с электронным замком или электромагнитным запором;
- дистанционно управлять освещением подъезда и наружным освещением дома;
- дистанционно управлять ( в том числе, включать и выключать) другими бытовыми электроприборами, например электропечью, освещением в любой из комнат.
Изобретение будет особенно полезным для инвалидов с ограниченной подвижностью.
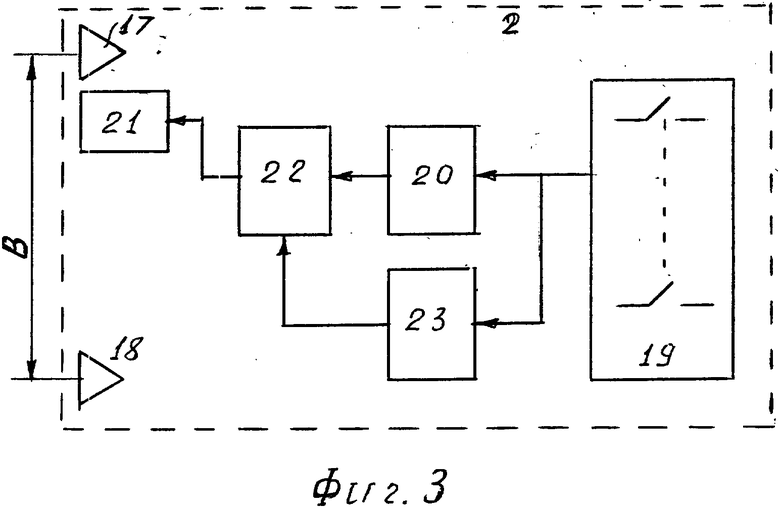
На фиг. 1 изображена блок-схема устройства, реализующего способ дистанционного управления; на фиг. 2 - вариант выполнения первого объектива и двумерной матрицы фотоприемников; на фиг. 3 - блок-схема дистанционного пульта управления; на фиг. 4 и 5 - алгоритм реализации способа дистанционного управления.
Способ дистанционного управления может быть реализован с помощью устройства, блок-схема которого изображена на фиг.1.
Устройство, реализующее заявленный способ, содержит стационарный приемопередающий блок 1, дистанционный пульт управления 2 и сервоприводы 31-3N.
Стационарный приемопередающий блок 1 содержит источник зондирующих импульсов 4, канал формирования действительного изображения 5, блок приема и обработки управляющего сигнала 6, генератор импульсов 7, процессор сигналов 8 и адаптер 9.
Канал формирования действительного изображения 5 содержит оптический затвор 10, первый объектив 11, двумерную матрицу фотоприемников 12 и блок опроса 13. Первый объектив 11 может быть выполнен сферическим, а двумерная матрица фотоприемников 12 - плоской. Первый объектив 11 может быть выполнен также в виде совокупности линз, состоящей из вертикальной цилиндрической линзы 11a и горизонтальной цилиндрической линзы 11b (фиг.2). В этом случае двумерная матрица фотоприемников 12 должна быть выполнена в виде вертикальной линейки фотоприемников 12a и горизонтальной линейки фотоприемников 12b. Оси двух линеек фотоприемников 12a и 12b и двух цилиндрических линз 11a и 11b ориентированы взаимно перпендикулярно.
Блок приема и обработки управляющего сигнала 6 содержит второй объектив 14, фотоприемник 15 и декодер 16.
Дистанционный пульт управления 2 содержит первый контррефлектор 17, второй контррефлектор 18, кнопочный переключатель 19, кодер 20, первичный оптический излучатель 21, первый усилитель мощности 22 и формирователь импульсов 23. Первичный оптический излучатель 21 находится в непосредственной близости от первого контррефлектора 17.
При выполнении дистанционного пульта управления 2 можно использовать кнопочный переключатель, аналогичный приведенному в кн. С.А.Седов. Индивидуальные видеосредства. Киев: Наукова думка, 1990 г, с. 443, рис.4.26.
Сервоприводы 31-3N содержат блоки управления 241-24N серводвигателями, вторые усилители мощности 251-25N, первые двигатели 261-26N, вторые двигатели 271-27N, третьи двигатели 281-28N. Количество сервоприводов зависит от типа объекта управления. В качестве двигателей могут быть использованы, например, шаговые двигатели типа ДШ-200.
Стационарный приемопередающий блок 1 и дистанционный пульт управления 2 имеют между собой оптическую связь. Стационарный приемопередающий блок 1 и сервоприводы 31-3N связаны между собой электрически.
Источник зондирующих импульсов 4 и первый объектив 11 расположены в непосредственной близости друг к другу, но не имеют между собой оптической связи. Источник зондирующих импульсов 4 связан с первым 17 и вторым 18 контррефлекторами оптически. Первый 17 и второй 18 контррефлекторы, первый объектив 11 и двумерная матрица фотоприемников 12 также связаны между собой оптически.
Двумерная матрица фотоприемников 12, блок опроса 13, процессор сигналов 8, адаптер 9 и сервоприводы 31-3N последовательно связаны между собой электрически.
Адаптер 9 имеет количество выходов M не менее количества входов N сервоприводов 31-3N, управляющих работой N бытовых электроприборов. Кнопочный переключатель 19, кодер 20, первый усилитель мощности 22 и первичный оптический излучатель 21 с регулируемыми параметрами излучения последовательно связаны друг с другом электрически.
Первичный оптический излучатель 21, второй объектив 14 и фотоприемник 15 последовательно связаны между собой оптически. Фотоприемник 15, декодер 16, второй вход и выход процессора сигналов 8, второй вход и выход адаптер 9 и входы сервоприводов 31-3N последовательно связаны между собой электрически.
Управляющее воздействие на объект регулирования осуществляется сервоприводами 31-3N в качестве исполняющего механизма, в которых могут быть использованы шаговый электродвигатель, манипулятор, пневматическое или гидравлическое устройство и т.д.. Сигналом для включения того или иного сервопривода 31-3N является кодированное излучение, а знак управляющего воздействия, его величина и скорость исполнения определяются координатами пространственного положения дистанционного пульта управления 2.
Устройство работает следующим образом. В исходном состоянии устройство находится в дежурном режиме. В этом режиме подключены адаптер 9, фотоприемник 15 и декодер 16. Все остальные узлы стационарного приемопередающего блока 1 отключены. Чтобы произвести включение устройства пользователю необходимо нажать кнопку "Вкл" кнопочного переключателя 19 дистанционного пульта управления 2. После этого кодер 20 выработает определенную последовательность импульсов, которая будет преобразована в оптический сигнал первичного оптического излучателя 21. Этот сигнал будет воспринят фотоприемником 15, дешифрован декодером 16 и передан на адаптер 9. Адаптер 9 в соответствии с этим сигналом переводит все узлы стационарного приемопередающего блока 1 из дежурного в рабочий режим. Стационарный приемо-передающий блок 1 начинает следить за пространственным положением дистанционного пульта управления 2 посредством использования источника зондирующих импульсов 4, канала формирования действительного изображения 5, процессора сигналов 8, генератора импульсов 7 и оптического затвора 10. Если теперь включить другую кнопку кнопочного переключателя 19, например "Т" - телевизор, то с выхода адаптера 9 сигнал перевода из дежурного в рабочий режим поступит на сервопривод 3т телевизора. Этим сигналом сервопривод 3т телевизора также переводится из дежурного в рабочее состояние. Одновременно фиксируются начальные координаты дистанционного пульта управления 2.
Движением руки при нажатой кнопке "Т" пользователь меняет одну или несколько пространственных координат дистанционного пульта управления 2. Разность текущих и начальных координат фиксируется процессором сигналов 8 и воспринимается сервоприводом 3т в качестве управляющих сигналов для цепи: блок управления 24т серводвигателями, второй усилитель 25т и двигатели 26т, 27т. Причем каждый из двигателей 26т и 27т сервопривода 3т реагирует на изменение какой-либо одной пространственной координаты дистанционного пульта управления 2. При этом движением руки можно менять состояние сервопривода 3т, следовательно, наклонять и поворачивать телевизор, добиваясь условий наилучшего видения непосредственно с места наблюдения.
Пространственные координаты дистанционного пульта управления 2 определяются следующим образом. Излучение от источника зондирующих импульсов 4, размещенного в непосредственной близости от первого объектива 11, распространяется в некотором телесном угле (рабочей зоне) и достигает дистанционного пульта управления 2. Первый 17 и второй 18 контррефлекторы отражают это излучение в направлении источника зондирующих импульсов 4, и поскольку первый объектив 11 находится в непосредственной близости от источника зондирующих импульсов 4, то отраженное излучение попадает также и в канал формирования действительного изображения 5, включающий оптический затвор 10, первый объектив 11, двумерную матрицу фотоприемников 12 и блока опроса 13. Поскольку плоскость двумерной матрицы фотоприемников 12 находится в фокальной плоскости первого объектива 11, то угловые координаты (ε,β) любой светящейся точки или любого точечного отражателя, например первого контррефлектора 17, находящегося в рабочей зоне стационарного приемо-передающего блока 1, будут связаны с координатой фотоприемника (XФ1, YФ1) двумерной матрицы фотоприемников 12, зафиксировавшего отраженное излучение следующими зависимостями: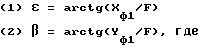
F - фокусное расстояние первого объектива 11.
После опроса состояния двумерной матрицы фотоприемников 12 посредством блока опроса 13 будет зафиксирован тот фотоприемник двумерной матрицы фотоприемников 12, в который попало излучение от первого контррефлектора 17. Поскольку частота посылок зондирующих импульсов установлена вдвое ниже кадровой частоты опроса состояния двумерной матрицы фотоприемников 12, то мерцающий через кадр первый контррефлектор 17 может быть легко выделен из помехи и координаты (XФ1, YФ1) фотоприемника двумерной матрицы фотоприемников 12 могут быть определены.
Угловые координаты первого контррефлектора 17(азимут ε и угол места β) можно также вычислить по приближенным формулам:
F -фокусное расстояние первого объектива 11,
K1, K2 - масштабные коэффициенты.
При этом предлагается, что дальность Z дистанционного пульта управления 2 много больше фокусного расстояния F первого объектива 11.
Данные о координатах XФ1, YФ1 передаются в процессор сигналов 8, в котором преобразуются по формулам 1 и 2 (или по формулам 3, 4) в значения азимута ( ε ) и угла места ( β ), которые с выхода процессора сигналов 8 поступают на адаптер 9. Адаптер 9 трансформирует полученные данные в последовательность импульсов, управляющих сервоприводами 31-3N.
Иногда для осуществления дистанционного управления каким-либо электроприбором использование только двух координат дистанционного пульта управления 2 оказывается недостаточным.
Рассмотрим, например, случай, когда необходимо с места расположения пользователя изучить ситуацию перед входной дверью дома, рассмотреть подробнее человека, пытающегося войти, и при необходимости либо открыть дверь, либо подать сигнал тревоги. В этом случае пользователю необходимо посредством нажатия одной кнопки на дистанционном пульте управления 2:
- рассмотреть ситуацию перед входной дверью дома посредством поворота оптической оси видеокамеры охранной системы (для произвольного поворота обзорной видеокамеры нужно два серводвагателя или две степени свободы движения камеры, и, соответственно, управлять камерой можно посредством дистанционного пульта управления 2, определяя две его пространственные координаты;
- внимательно рассмотреть человека, пытающегося войти, посредством изменения оптического увеличения видеокамеры охранного устройства (это можно сделать посредством изменения еще одной координаты дистанционного пульта управления 2, например изменения его дальности от стационарного приемопередающего блока 1;
- открыть дверь или подать сигнал тревоги можно посредством определения еще одной пространственной координаты дистанционного пульта управления 2, например, изменяя угол поворота вокруг продольной оси дистанционного пульта управления 2 (например поворот по часовой стрелке дистанционного пульта управления 2 откроет дверь на электромагнитном запоре, а поворот против часовой стрелки вызовет появление сигнала тревоги).
Определить четыре пространственные координаты дистанционного пульта управления 2 можно используя второй контррефлектор 1, с координатами XФ2, YФ2, расположенный на фиксированном расстоянии B от первого контррефлектора 17. В этом случае устройство в дополнение к определенным ранее двум угловым координатам (азимут ε и угол места β) становится чувствительным еще к двум координатам:
- к координате угла поворота дистанционного пульта управления 2 (ϕ) относительно продольной оси, определяемой как отношение разницы продольных координат к разнице вертикальных координат первого 17 и второго 18 контррефлекторов, отображаемых на двумерной матрице фотоприемников 12:
(5) ϕ = K3•(Xф1-Xф2)/(Yф1-Yф2) = K3•ΔX/ΔY,
где K3 - масштабный коэффициент.
- и к координате дальности дистанционного пульта управления 2(Z), определяемой по формуле:
(6) Z=K4•F/((XФ1-XФ2)2 + (YФ1-YФ2)2)1/2,
где F - фокусное расстояние первого объектива 11,
K4 - масштабный коэффициент.
Часто при управлении бытовыми приборами, когда пропорциональность разности координат и интенсивности воздействия может не быть строгой, выражение (4) можно упростить, сделав приближенным, и представить в виде:
Формулы 1-5 можно рассматривать как алгоритм работы процессора сигналов 8.
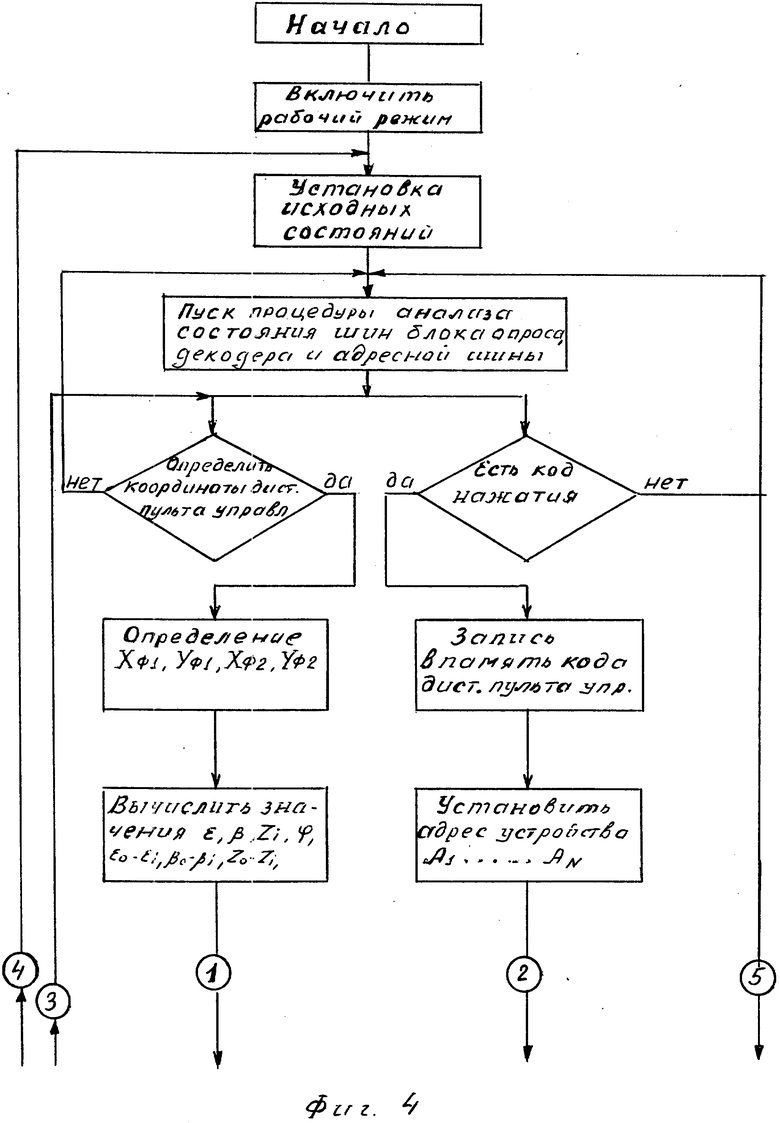
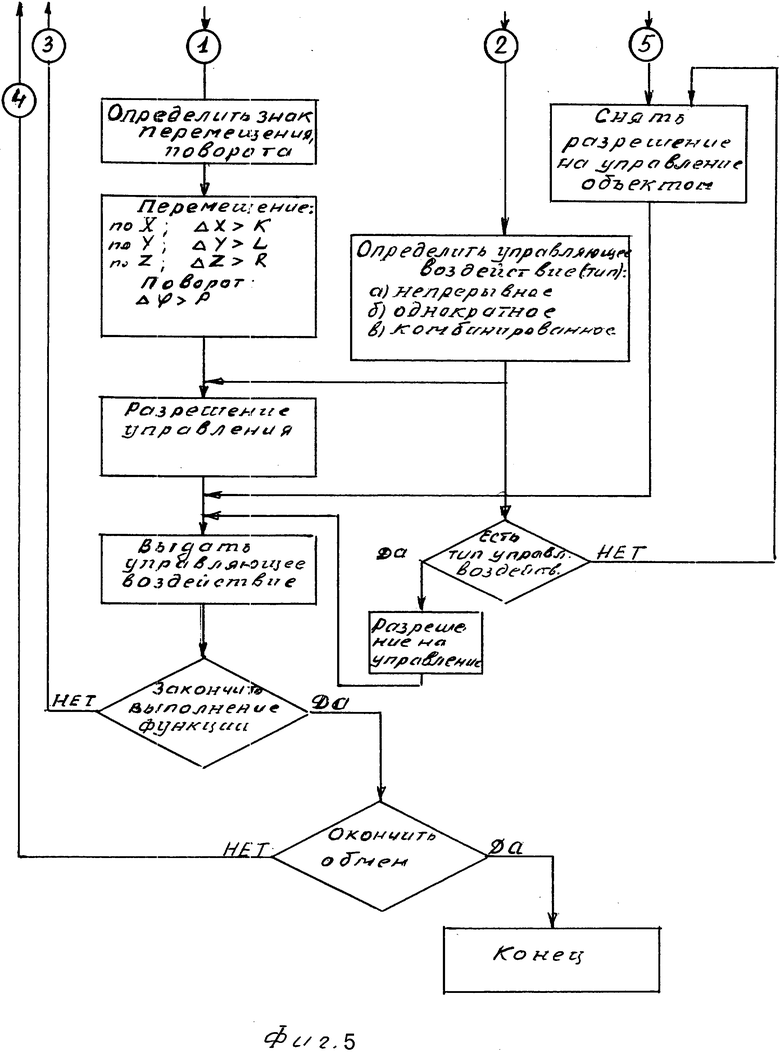
Рассмотрим подробнее алгоритм работы заявляемого устройства (фиг.4 и 5).
После перехода стационарного приемо-передающего блока 1 в рабочий режим блок опроса 13 вместе с процессором сигналов 8 начинают работать по программе, записанной в ПЗУ процессора сигналов 8. Одновременно формируется запрет на выдачу команд для сервоприводов 3. В этот интервал времени производится установка исходных (нулевых) данных на шине данных (εo, βo, Zo, ϕo) , шине адреса и установка демультиплексора внешних устройств в адаптере 9.
При получении готовности от адаптера 9 процессор сигналов 8 производит опрос шины данных (определяет текущие координаты дистанционного пульта управления 2 (εi, βi, Zi, ϕi) и его код. Процедура опроса кода дистанционного пульта управления 2 производится циклически с периодом 40 мс, причем код дистанционного пульта управления 2 считывается один раз в период, а контроль шины данных и считывание данных производится непрерывно в интервал времени их формирования в блоке опроса 13.
При приеме кода сигналов дистанционного пульта управления 2 декодера 16 определяет код объекта регулирования, формирует адрес сервопривода 3 (Ai) и записывает этот адрес в память. По этому адресу формируются команды того сервопривода 3 устройства, название которого соответствует нажатой кнопке кнопочного переключателя 19.
Все типы исполнительных устройств бытовой техники можно разделить на два типа: манипуляторы (например выключатели) и сервоприводы пропорционального управления (например шаговые двигатели). Это обстоятельство должно быть учтено при программировании клавиш кнопочного переключателя 19.
После получения процессором сигналов 8 данных из блока опроса 13 последний вырабатывает разность значений текущих координат и координат, определенных в процессе инициализации (εo-εi, βo-βi, Zo-Zi), а адаптер 9 формирует последовательность импульсов для соответствующего сервопривода 3. Частота тактовых импульсов на выходе адаптера 9 (т.е. скорость вращения двигателя) пропорциональна величине разностных координат, а их полярность (т.е. направление вращения двигателя) определяется знаком этой разности. Одновременно процессор сигналов 8 контролирует факт нажатия клавиши кнопочного переключателя 19 и при ее отжатии пользователем снимает разрешение адаптера 9 на выполнение команды сервоприводом 3 и устанавливает исходные состояния на шинах данных и адреса.
Процессор сигналов 8 также анализирует состояние режима обмена и, если с дистанционного пульта управления 2 в течение заданного времени не приходит кодовая посылка, процессор сигналов 8 переводит устройство снова в дежурный режим.
Разностные координаты дистанционного пульта управления 2 могут определять различные воздействия на сервопривод 3. Например, поворот телевизора по азимуту может быть осуществлен при горизонтальном перемещении дистанционного пульта управления 2, а наклон телевизора - при вертикальном перемещении дистанционного пульта управления 2. Величина разностных координат дистанционного пульта управления 2 должна превышать некоторую пороговую величину (K, L, P и R) по соответствующей координате, определяющей область устойчивости устройства при изменении пространственных координат дистанционного пульта управления 2.
Следует иметь ввиду, что форма выполнения изобретения, описанная выше и показанная на чертежах, представляет собой только возможный предпочтительный вариант его осуществления. Могут быть использованы различные варианты выполнения изобретения.
Источники информации:
1. С. А.Седов. Индивидуальные видеосредства. Киев: Наукова думка, 1990, с.440-456.
2. DE N 4302725 A1, кл. H 04 S 7/00, публ. 1993 г.
Изобретение относится к области систем управления и регулирования и может быть использовано для дистанционного управления бытовыми электроприборами, например освещением, телевизором, стереофонической системой, телекамерами охранной системы и т.п. При осуществлении заявленного способа определяют пространственные координаты связанных с телом оператора оптических излучателей и по полученным пространственным координатам формируют управляющее воздействие на объект управления. Оптические излучатели устанавливают на дистанционном пульте управления, при этом один из оптических излучателей выполняют первичным с регулируемыми параметрами излучения. Кроме того, при осуществлении способа объект управления выбирают и изменением пространственного положения дистанционного пульта управления устанавливают направление и интенсивность управляющего воздействия. Выбор объекта управления проводят с дистанционного пульта управления по параметрам излучения первичного оптического излучателя с регулируемыми параметрами излучения. Для определения пространственного положения дистанционного пульта управления получают двумерное действительное оптическое изображение области его вероятного расположения с проекциями на нем оптических излучателей и по расположению проекций оптических излучателей на двумерном действительном оптическом изображении определяют пространственное положение дистанционного пульта управления, причем направление и интенсивность управляющего воздействия определяют по векторной величине разности пространственных координат оптических излучателей в момент выбора объекта управления и в текущий момент. 1 з.п. ф-лы, 5 ил.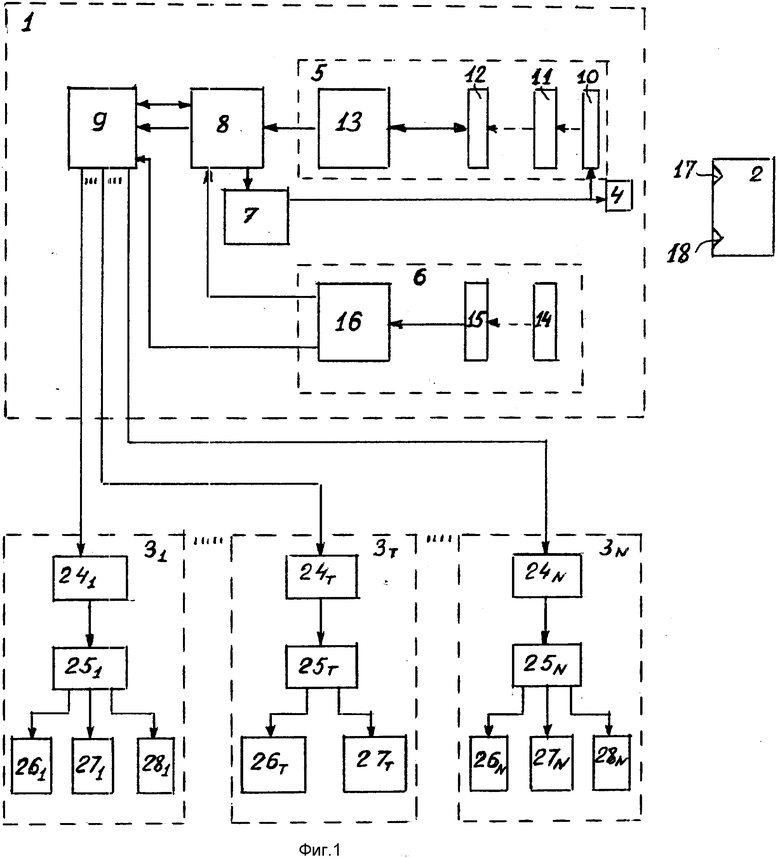
| DE, патент, 4307490, кл | |||
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |
