I
Изобретение относится к зубчатым передачам и может быть испопьзовано в качестве привода, например, в механизма тр)анспЬртирования материалов или в манипуляторах.
Известно приводное устройство, содержащее пва двигателя, ведомое звено и трехзвенный дифференциал, основные звень которого соответственно связаны с двигателями и с ведомым звеном LIJ.
Недостатками этого устройства являются наличие зазоров в кинематических парах дифференциала и невозможность получения плоскопараллельного движения ведомого звена.
Наиболее близким по технической сущности к. предложенному является приводное устройство, содержащее два двигателя, два трехзвенных дифференциала, основные звенья которых кинематически связаны между собой и с двигателями, люфтовыбиракхцее устройство и ведомое звеноЬ2| ,
Недостатком этого устройства являет ся невозможность получения плоскопарал-
лельного движения ведомого звена по двум координа.ам, а также поступательного перемещения ведомого звена при работе одного из двигателей.
Цель изобретения - расширение кине- матических возможностей устройства.
Это достигается тем, что центральшле колеса и водило первого дифференциала связаны с одноименными звеньями второго
дифференциала посредством передач с равными передаточными отношениями. Жестко соединенный с ведомым звеном сателлит первого дифференциала В1 1пол- нен двухвенцовым. Эти веншя соответственно связаны с центральными колесами Этого же дифференциала двумя передачами, имеющими равные по величине и противоположные по знаку передаточные отношения относительно водила. Пер-
вый двигатель через люфтовыбирающее устройство связан с одним из центральных колес второго дифференциала, а второй двигатель связан с водилом этого же дифференциала.
363
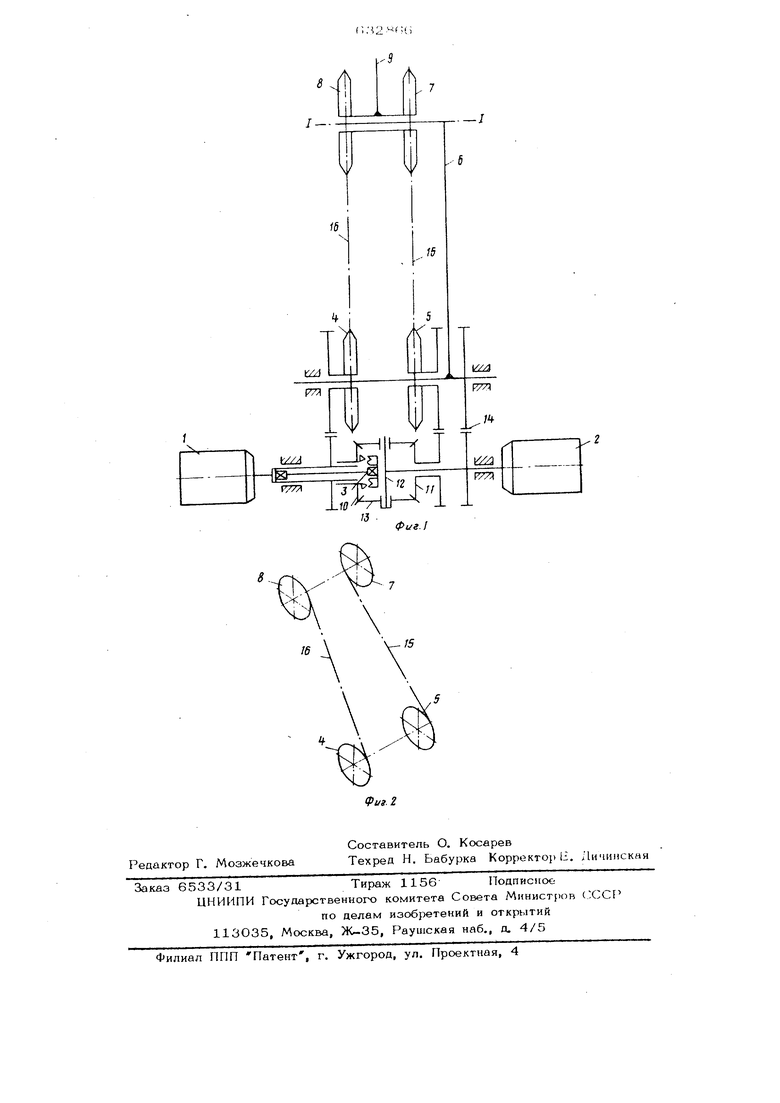
Па 4чч. 1 показана кинематическая схема преопагаемого приводного устройства; на фиг. 2 - часть кинематической схемы.
Приводное устройство содержит двига- тели 1 и 2, люфтовыбирающее устройство 3, перв1,1й дифференциал, включающий пентр альиые колеса 4 и 5, водило 6, установленный на нем двухвеныовый сателлит с венцами 7 и 8, жестко соедипенный с ведом1,1м звеном 9; второй дифференциал, включакчций центральные колеса 10, 11, водило 12, сателлиты 13. Центральное колесо 10 через люфтовыбирающее устройство 3 связано с двигате- лем 1, а водило 12 связано с двигателем 2. Центральные колеса 10, 11 и водило 12 связаны соответственно с центральт |ми колесами 4, 5 и водилом 6 передачами (например, зубчатыми) 14 имеющими равные передаточгные отношения.
ГЗенец 8 с центральным колесом 4 и венец 7 с цент})алы-а-.1м колесом 5 связаны передачами 15 и 16, имеющими равные по величине, но противоположные по знаку передаточные отношения относительно водила 6.
На фиг. 2 показан пример выполнения передач 15 и 16 в виде цепших передач с параллельной и перекрестной связями.
Приводное устройство работает следующим образом.
При работающем двигателе 1 и заторможенном двигателе 2, центральные колеса 10 и 11 вращаются в стороны с равными скоростями. Центральные колеса 4 и 5 также вращаются в разные стороны с равными скоростями. Поскольку це 1тральные колеса 4 и 5 свя заны с зубчатыми венцами 8 и 7 сателлита передачами 15 и 16, имеющими равные по величине и противоположные п знаку передаточные отнощения, а водило 6, связанное с двигателем 2, неподвижно, то зубчатые венцы 8 и 7 сателлита и жестко соединенные с ним ведомое звено 9 вращаются в одну и ту же cTOpoTiy относительно оси I-I.
4
При работаклцем двигателе 2 и заторможенном двигателе 1, если величины пе- 1:юдаточт ых отношений передач 15 и 16 равны единице, а водило 6, связанное с двигателем 2, вращается, абсолк тная уг ловая скорость вращения венцов 7 и 8 равна нулю, т.е. ведомое звено 9 соверщает поступательное движение.
Если двигатели 1 и 2 работают одновременно, то ведомое звено 9 совершает плоскопараллельное движение. Такое выполнение приводного устройства расширяет его кинематические возможности и позволяет получать вращательное, поступательное и плоскопараллельное движение ведомого звена.
Формула изобретения
Приводное устройство, содержащее два двигателя, два трехзвенных дифференциала, основные звенья KOTOpi ix кинематически связаны между собой и с двигателями, люфтовыбирающее устройство и ведомое звено, отличающееся тем, что, с целью расширения кинематических возможностей устройства, центральные колеса и водило первого дифференциала связаны с одноименными звеньями второго дифференциала посредством передач с равными передатошь ми отношениями, жестко соединенный с ведомым звеном сателлит первого дифференциала выполнен двухвенцовым, эти вет)цы соответственно связаны с центральными колесами этого же дифференциала двумя передачами, имеющими равные по величине и противоположные по знаку передаточные отношения относительно водила, первый двигатель через люфтовыбирающее устройство связан с одним из централыплх колес второго )еренциала, а второй двигатель связан с водилом этого же диффе{хгн- циала.
Источники информации, принятые во внимание при экспертизе:
1.Кожевников С. П. и др. Механизмы. М., Машгиз, 1965, с. 246, фиг. 3.180.
2.Авторское свидетельство СССР NO 301481, Р 16 Н 1/28, 1969.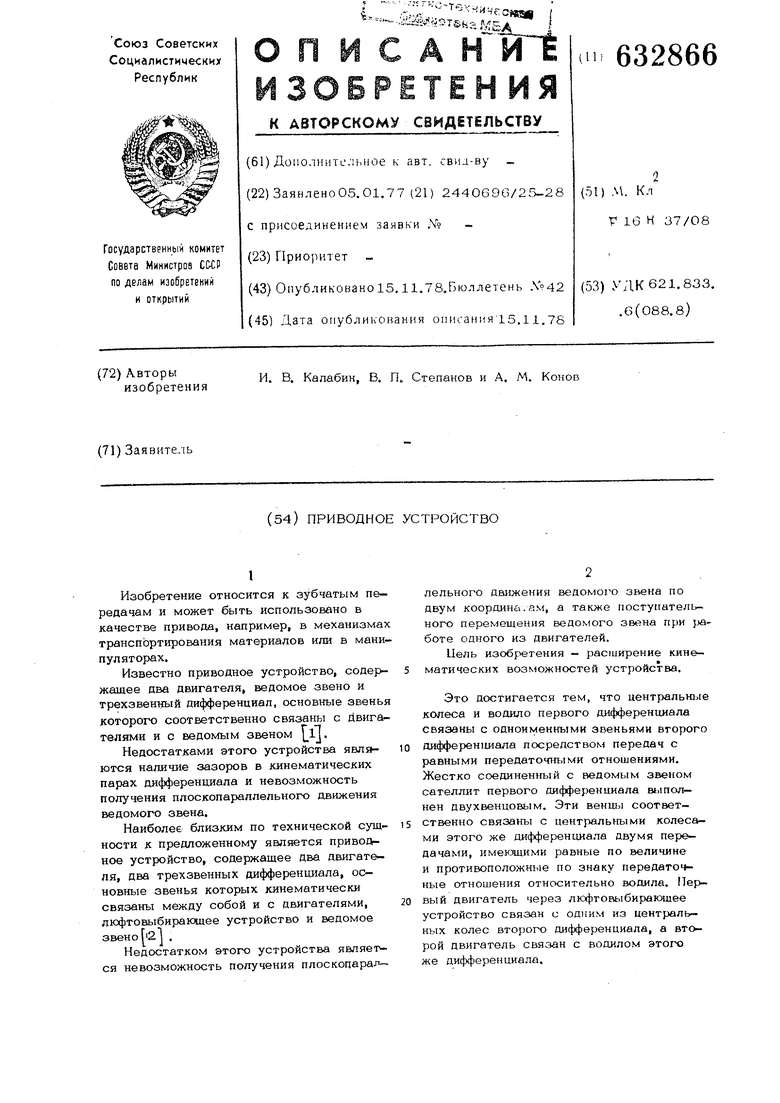
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ РАСПРЕДЕЛЕНИЯ МОЩНОСТИ ДЛЯ ДИФФЕРЕНЦИАЛА ТРАНСПОРТНЫХ СРЕДСТВ | 1999 |
|
RU2156902C1 |
| Рука манипулятора | 1983 |
|
SU1117204A1 |
| ПЛАНЕТАРНАЯ СОСТАВНАЯ КОРОБКА ПЕРЕДАЧ ТРАНСПОРТНОГО СРЕДСТВА | 2008 |
|
RU2380596C1 |
| МЕХАНИЗМ РАСПРЕДЕЛЕНИЯ МОЩНОСТИ В ТРАНСМИССИИ ТРАНСПОРТНОГО СРЕДСТВА | 2021 |
|
RU2763002C1 |
| ПЛАНЕТАРНАЯ СОСТАВНАЯ КОРОБКА ПЕРЕДАЧ ТРАНСПОРТНОГО СРЕДСТВА | 2008 |
|
RU2382916C1 |
| Трансмиссия автомобиля | 1980 |
|
SU961551A3 |
| МОДУЛЬНАЯ КОРОБКА ПЕРЕДАЧ С СООСНЫМИ ВАЛАМИ | 2005 |
|
RU2280794C1 |
| ВЫСОКОМОМЕНТНЫЙ ДИФФЕРЕНЦИАЛЬНЫЙ ГИДРОМЕХАНИЧЕСКИЙ ВАРИАТОР | 2007 |
|
RU2347966C1 |
| ТРАНСМИССИЯ ГУСЕНИЧНОЙ МАШИНЫ | 2005 |
|
RU2297925C1 |
| ЭКСЦЕНТРИКОВЫЙ ЦИКЛОИДАЛЬНЫЙ РЕДУКТОР С ПРЕДВАРИТЕЛЬНОЙ СТУПЕНЬЮ | 2007 |
|
RU2338103C1 |