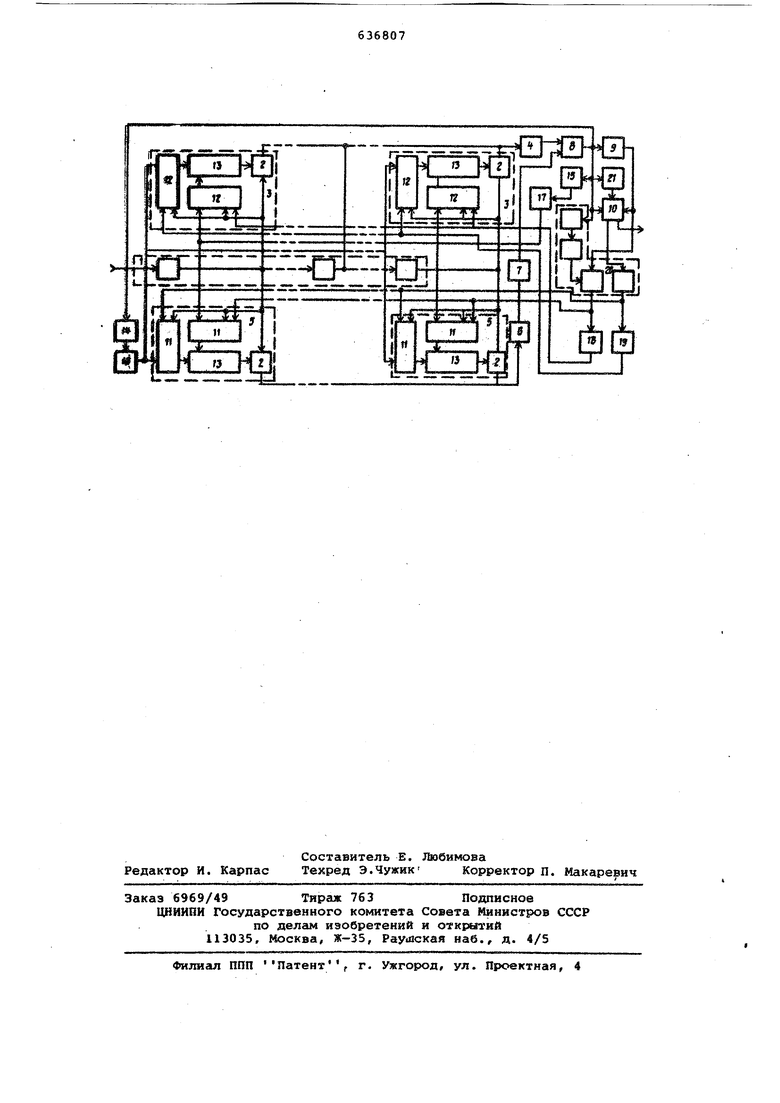
ния опорного колебания. При этом выход соответствующего из М косинусных конверторов через один из усреднителе подключен к управляющему входу одного из ft аттенюаторов синфазного подканал а выход соответствующего из П синусных конверторов через один из усреднителей подключен к управляющему входу одного иа и аттенюаторов квадратурного подканала. Выход третьего cyNwaTopa через последовательно соединенные, первый выпpя aIтeль и первый фильтр нижних частот подключен к объединенным опорным входам синусных и косинусных конверторов, объединенные модульные входы которых через последовательно соединенные второй выпрямитель и второй фильтр нижних частот соединены с выходом третьего сумматора, который через блок- выделения опорного колебания подключен к третьему входу детектора, -первый и второй входы и выход которого соеди йены соответственно с первым, вторым и третьим входами блока t формирования стробирующих импульсов.. Первый выход этого блока подключен ко входу первого блока сдвига импульсов и к объединенным первым входам стробирования синусных конверторов, объёдиненные вторые входы стробирования которых соединены со вторьвл выходом блока формирования стробирующих импульсов и входом второго блока сдвига импульсов, выход которого подклгочен к объединенным вторым входам стробирования косинусных конверторов объединенные первые входы стробирования которых соединены с выходом первого блока сдвига импульсов. На чертеже представлена структурная электрическая схема устройства. Адаптивный корректор сигналов фазовой модуляции содержит блок задержки I, каждый из выходов которого через соответствующий из П аттенюаторо 2 синфазного подканала 3 подключен к одному из п входов первого сумматора 4. Через соответст вуюишй из Y аттеню аторов квадратурного подканала 5 каждый из п выходов блока задержки подключен к одному из П входов второ го сумматора 6, выход которого через фазовращатель 7 подключен к первому . входу третьего сумматора 8 г второй вход которого соединен с выходом первого сумматора 4. Выход третьего сумматора 8 подключен ко входу блока 9 выделения тактового колебания и к первому входу детектор а 10, второй вход которого соединен с выходом блока 9 выделения тактового колебани Корректор также содержит п синусных конверторов 11,П косинусных конверторов 12, 2 п усреднителей 13, первый и второй выпрямители 14, 15, первый и второй фильтры 16 и 1 ниж них частот, первый и второй блоки 18 19 сдвига импульсов, блок 20 формирования стробирующих импульсов и блок 21 выделения опорного колебания. При этом выход соответствующего из п косинусных конверторов 12 через один из усреднителей 13 подключен к управляющему входу одного из аттенюаторов 2 синфазного подканала 3, а выход соответствующего из п синусных конверторов 11 через один из усреднителей 13 подключен к управляющему входу одного из И аттенюаторов 2 квадратурного подканала 5. Выход третьего сумматора 8 через последовательно соединенные первый выпрямитель 14 и первый фильтр 16 нижних частот подключен к объединенным Опорным чходам синусных и косинусных конверторов 11, 12, объединенные модульные входы которых через последовательно соединенные второй выпрямитель 35 и второй фильтр 17 нижних частот соединены с выходом третьего сумматора 8. Сумматор 8 через блок 21 выделения опорного колебания подключен к третьему входу детектора 10, первый и второй входы и выход которого соединены соответственно с первым, , вторым и третьим входами блока 20 формирования стробирующих импульсов. Первый выход блока 20 подключен ко входу первого блока 18 сдвига импульсов и к объединенным первым входам стробирования синусных конверторов 11, объединенные вторые входы стробирования которых соединены со вторым выходом блока 20 формирования строби. рующих импульсов и входом второго блока 19 сдвига импульсов. Выход блока 19 подключен к объединенным вторым входам стробирования косинусных конверторов 12, объединенные первые входы стробирования которых соединены с выходом первого блока 18 сдвига импульсов . Устройство работает следуюнщм образом. Для обеспечения процесса адаптивной настройки корректора на управляющие входы аттенюаторов 2 подаются через усреднители 13 сигналы управления. Эти сигналы вырабатываются в соответствии с фopмyлa 1и, определяющими алгоритм адаптивной настройки корректора. Сигнал А(О) получают в результате выпрямления и фильтрации в выпрямителе 14 и фильтре 16 выходного сигнала. Сигнал А(г) получают в результате аналогичных операций в таких же блоках, подключенных к выходу корректора. Для получения сигнала А(О) используется фильтр 16 с постоянной времени значительно большей единичного интерва.ла, а для получения сигнала A(i) фильтр 17 берется с постоянной времени Г4НОГО меньшей единичного интервала. Основными операциями в формулах, описывающих алгоритм настройки, является определение величины косинуса или синуса разности углов наполняющих колебаний на выходе корректора и на отводах блока задержки 1. Эти операции в корректоре осуществляютс с помощью косинусных и синусных кон верторов 12, 11, которые представляю собой ключи, пропускающие на свой вы ход сигнал с отвода блока задержки в момент появления стробирующего импульса. При зтом для синусного кон вертора 11 момент появления стробирующего импульса соответствует положительному нулевому пересечению сигнала на выходе корректора. Этот импульс для определения синуса углов f(i) Ц (i-e) получают в результат дифференцирования сигнала с дополнительного выхода детектора 10, а для определения синуса углов У(i )-4Ci-e в результате ограничения сигнала на выходе третьего сумматора 8 и выделе нием первого импульса в блоке 20. Блок 20 обеспечивает прохождение на свой выход первого импульса Из после довательности, поступающей после фронта тактового колебания от блока 9, расположенного в середине значащего интервала. Аналогичные стробирующие импульсы подаваемые на косинусные конверторы 12, получают путем задержки импульсов для синусных конверторов 11 на 0,25 периода наполняющего колебания сигнала в блоках 18, 19. Результаты перемножения величин А(0) и A(i) на соответствующие синус и косинус указанных углов складываются с учетом знака в сумматорах 4, .6, 8. Формула изобретения Адаптивный корректор сигналов фазовой модуляции, содержащий блок задержки, каждый из П выходов которого через соответствующий из п аттенюаторов синфазного подканала подключе к одному из П входов первого сумматора, а через соответствующий из П аттенюаторов квадратурного подканала кажделй из ft выходов блока задержки подключен к одному из п входов второго сумматора, выход которого через фазовращатель подключен к первому входу третьего сумматора, второй вхо которого соединен с выходом первого сумматора, а выход третьего су.тматор 76 подключен ко входу блока выделения тактового колебания и к первому входу детектора, второй вход которого соединен с выходом блока выделения тактового колебания, отличающийся тем, что, с целью сокращения времени коррекции путем повыи1ени{ скорости сходимости алгоритма адаптивной настройки, введены п синусных конверторов, п косинусных конверторов, 2 п усреднителей, первый и второй выпрямители, первый и второй фильтры нижних частот, первый и второй блоки сдвига импульсов, блок формирования стробирующих импульсов и блок выделения опорного колебания, при этом выход соответствующего из п косинусных конверторов через один из усреднителей подключен к управляющему входу одного из п аттенюаторов синфазного подканала, а быход соответствующего из П синусных конверторов через один из усреднителей подключен к управляющему входу одного из аттенюаторов квадратурного подканала, выход третьего сумматора через последовательно соединенные первый выпрямитель и первый фильтр нижних частот подключен к объединенным опорным входам синусных и косинусных конверторов, объединенные модульные входы которых через последовательно соединенные второй выпрямитель и второй фильтр нижних частот соединены с выходом третьего сумматора, который через блок выделения опорного колебания подключен к третьему входу детектора, первый и второй входы и выход которого соединены соответственно с первым, вторым и третьим входами блока формирования стробирующкх импульсов, первый выход которого подключен ко входу первого блока сдвига импульсов и к объединенным первым входам стробирования синусных конверторов, объединенные вторые входы стробирования которых соединены со вторвлм выходом блока формирования стро бир тсщик импульсов и входсм второго блока сдвига импульсов, выход которого подключей к объединенным вторь входам стробирования косинусных конверторов, объединенные первые входы стробирования которых соединены с выходом первого блока сдвига импульсов. Источники информации, принятые во внимание при экспертизе: 1. Патент США 3727136, кл. 325/320, 1973.
| название | год | авторы | номер документа |
|---|---|---|---|
| Адаптивный корректор | 1979 |
|
SU790353A1 |
| Адаптивный корректор | 1979 |
|
SU866756A2 |
| Адаптивный корректор | 1977 |
|
SU657626A1 |
| Цифровой адаптивный корректор сигналов многократной фазовой модуляции | 1981 |
|
SU1012445A1 |
| Адаптивный корректор сигналов с фазовой модуляцией | 1976 |
|
SU605321A1 |
| ИЗМЕРИТЕЛЬ ХАРАКТЕРИСТИК ФАЗОВЫХ ФЛУКТУАЦИЙ | 1992 |
|
RU2041469C1 |
| Адаптивный корректор | 1978 |
|
SU769748A1 |
| Устройство для автоматической коррекции амплитудно-частотной характеристики широкополосного канала связи | 1978 |
|
SU745001A1 |
| Устройство приема дискретных сигналов | 1984 |
|
SU1223371A1 |
| АДАПТИВНОЕ УСТРОЙСТВО ЗАЩИТЫ РАДИОЛОКАЦИОННОЙ СТАНЦИИ ОТ ПАССИВНЫХ ПОМЕХ | 1994 |
|
RU2097781C1 |