1
Изобретение относится к измерительной технике, в частности к измерителям параметров движения подвижных объектов.
Известны акселерометры с гидродинамическим подвесом подвижной части, содержащие вращающийся, частично заполненный жидкостью сосуд и твердое тело с осевым сквозным каналом , 2, 3. Однако низкая точность известных акселерометров обусловлена влиянием деформации жидкости подвеса на датчики смещения, в частности на фотоэлектрические датчики смещения.
Цель изобретения заключается в повыщении точности. В описываемом аксел-ерометре это достигается тем, что он снабжен двумя прозрачными цилиндрическими шайбами, укрепленными на торцах твердого тела напротив фотоэлектрических датчиков смещения.
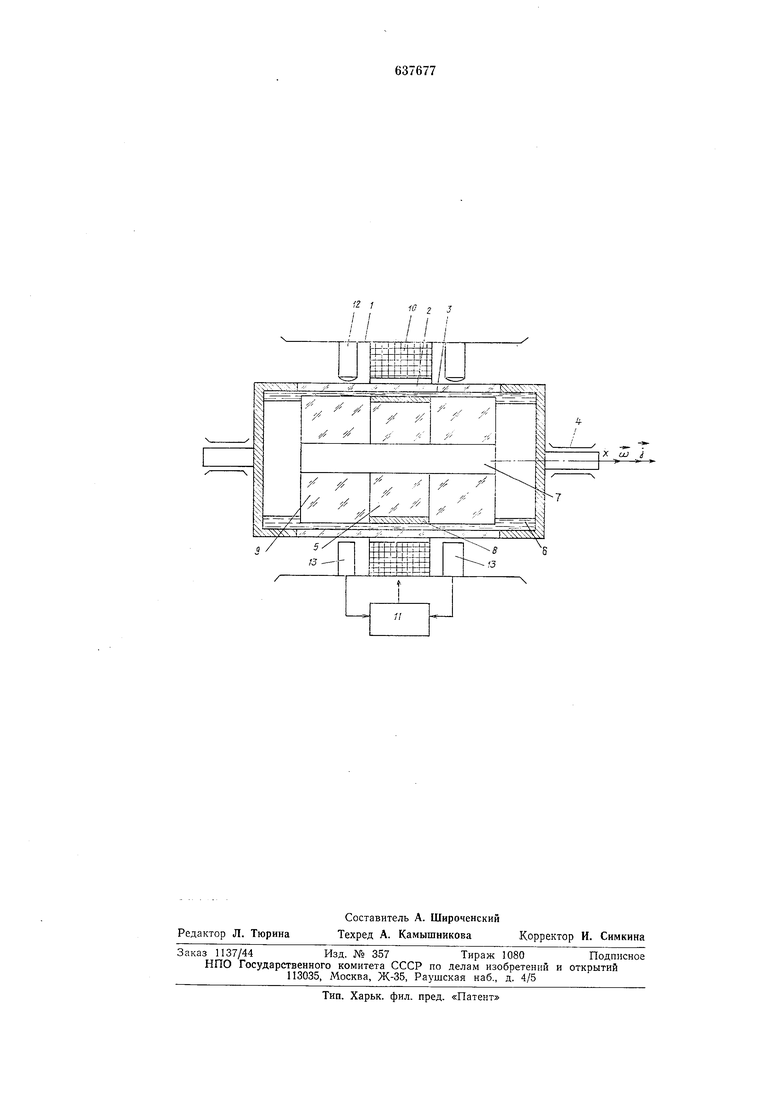
На чертеже показана упрощенная конструктивная схема описываемого акселерометра.
В корпусе / акселерометра размеще.-t полый герметический сосуд 2, внутренняя полость которого выполнена в виде кругового цилиндра 5. Сосуд выполняют из прозрачного материала (торцовые части могут выполняться из «епрозрачного материала) и устанавливают в подщипниковых узлах
4. Сосуд приводится во вращение вокруг полярной оси X электрическим двигателем (на чертеже не показан) с угловой скоростью 0). Внутри него находятся цилиндрическое твердое тело 5 (называемое в дальнейшем просто тело) и прозрачная жидкость 6 в небольщом объеме. Свободную часть сосЗДа занимает какой-либо газ в смеси с парами жидкости или просто пары жидкости (частичное заполнение жидкостью) . Тело 5 имеет сквозное отверстие 7 для перетекания газа. В нем укреплена ферромагнитная масса в виде, например, кольца 8. Ферромагнитная масса может
5 быть выполнена также в виде постоянного магнита. На торцах тела 5 укреплены прозрачные цилиндрические щайбы 9.
Тело 5 имеет такую конструкцию, что его масса больще массы рабочей жидкос0ти, которую вытесняет тело, будучи в нее полностью погруженным.
В корпусе / акселерометра установлено устройство 10 для создания силы обратной связи. Опа может иметь различную конст5рукцию, например в виде соленоида, обмотка которого подключена к выходу усилителя //. Кроме того, в корпусе / в зоне прозрачной части тела 5 укреплены источники 12 излучения, посылающие на сосуд 2 ор0ганизованный поток излучения. Диаметрально противоположно источникам 12 в корпусе / прибора укреплены фотоприемники 13 (могут, например, применяться площадные фотодиоды), которые соединены по дифференциальной схеме и подключеиы на вход усилителя 11.
При включении подается питание на электрический двигатель и усилитель //. При этом начинают вращаться сосуд 2, за счет сил вязкости - вращается жидкость 6, а также - тело 5. При некоторой скорости вращения происходит радиальное центрирование тела 5, и оно освобождается от действия сил сухого трения, приобретая при этом возможность свободно неремещаться вдоль оси чувствительности (осн X). В процессе радиального центрирования тела 5 оно может (в общем случае) оказаться в произвольном положении по отношению к полярной оси сосуда (иметь ненулевую координату X). Установка тела 5 в .нулевое положение осуществляется обратной связью. Кроме того, оно может быть устаНовлено в Нулевое положение путем подачи на обмотку соленоида 10 напряжения от отдельного источника питания без использования обратной связи.
Система съема информации о положении тела 5 на оси X работает следующим образом. Цилиндрическое прозрачное тело 2, слой прозрачной жидкости 6 между сосудом и телом 5 и его прозрачная часть (щайбы 9) образуют оптическую цялинд-ричбскую систему (линзу), которая собирает за сосудом 2 падающий на него параллельный пучок лучей в яркую узкую полоску. Пройдя через линзу, лучистый поток попадает на фотоприемники 13, чувствительные слои которых располагаются в фокальной плоскости линзы.
Фотоприемники 13 соединены по известной дифференциальной схеме.
Если тело 5 .находится в нулевом положении, то лучистые потоки от источников 12, частично задерживаясь непрозрачной частью тела 5, проходят цилиндрическую линзу и дают одинаковую «засветку фотоприемйиков 13. При см.ещении тела 5 .в ту иди другую сторону .на выходе фотоприемников 13 появляется электрический сигнал, величина которого пропорциональна смещению тела 5, а полярность определяет направление его смещения от нулевого положения. Сигнал фотоприемников 13 поступает на вход усилителя //, к выходу которого подключена обмотка соленоида 10 обратной связи.
При движении акселерометра в направлении оси чувствительности с ускорением / тело 5 перемещается в сторону, противоположную ускорению. На фотоприемниках 13 возникает электрический сигнал, который усиливается усилителем 11. По обмотке соленоида 10 течет ток и создается сила, п.рилож-енная к телу 5, пропорциональная его смещению относительно нулевого положения и направланная в противоположную сторону. При постоянном ускорении силы, действующие на тело 5, ура.вновешиваются, ;И оно Не перемещается вдоль сосуда.
Выходным сигналом акселерометра является ток обратной связи, протекающий по обмотке соленоида 10.
Введение в состав подвижной части прозрачных щайб 9 позволяет исключить деформацию слоя жидкости на пути лучистого потока источников 12 из-за вибрационных возмзщений, действия ускорения и теплового расщирения. Это приводит к повышению точности датчика смещения и увеличению устойчивости акселерометра.
Формула изобретения
Акселерометр, содержащий вращающийся полый прозрачный цилиндр, частично заполненный прозрачной жидкостью, помещенное в сос)Д твердое цилиндрическое тело с ферромагнитной вставкой и осевым сквозным каналом, два фотоэлектрических датчика смещения, установленные вне цилиндра по торцам твердого тела, обмотку обратной связи и усилитель, включенный между датчиками смещения и об.моткой обратной связи, отличающийся тем, что, с целью повыщения точности, он снабжен двумя прозрачными цилиндрическими щайбами, укрепленными на торцах твердого тела напротив фотоэлектрических датчиков смещения.
Источники информации, принятые во внимание при экспертизе:
1.Беклемищев А. И. Кандидатская диссертация. МАИ, 1965.
2.Андрейченко К. ;П. О цилиндрическом гидродинамическом подвесе на подвижном основании. Известия вузов, «Приборостроение, 1976, № 12.
3.Горенштейн И. А. и Шульман И. А. Инерциальные навигационные системы. «Машиностроение, 1970.
10 2 J
| название | год | авторы | номер документа |
|---|---|---|---|
| Акселерометр | 1981 |
|
SU1027626A1 |
| Гравиметр | 1983 |
|
SU1125580A1 |
| Акселерометр | 1980 |
|
SU901915A1 |
| Акселерометр | 1979 |
|
SU845102A1 |
| Акселерометр | 1975 |
|
SU560181A1 |
| Акселерометр | 1983 |
|
SU1087894A1 |
| Акселерометр | 1979 |
|
SU853555A1 |
| Маятниковый компенсационный акселерометр | 1990 |
|
SU1742733A1 |
| ОСЕВОЙ КОМПЕНСАЦИОННЫЙ ЦИФРОВОЙ АКСЕЛЕРОМЕТР С НЕКОНТАКТНЫМ ПОДВЕСОМ ИНЕРЦИОННОЙ МАССЫ | 1997 |
|
RU2128345C1 |
| Акселерометр | 1979 |
|
SU853554A1 |