Изобретение относится к измерительной технике и может быть использовано для измерения линейного ускорения движения объекта при любой ориентации измерительной оси прибора, а также для измерения ускорения силы тяжести в гравиметрических приборах.
Известен ряд осевых компенсационных акселерометров с неконтактным подвесом инерционной массы (ИМ), при этом подвес реализуется на различных физических принципах. К ним в частности относится акселерометр "MESA", разработанный фирмой "Bell Aerosystems" с электростатическим подвесом ИМ (Теория и применение электромагнитных подвесов. -М.: Машиностроение, 1980). В этом акселерометре силовая компенсация действующего ускорения обеспечивается с помощью электростатического датчика силы (ДС). Применение электростатических сил для подвеса и уравновешивания ИМ обуславливает ряд специфических недостатков:
- масса должна быть изготовлена из легкого конструктивно-стабильного материала - берилия, ввиду токсичности которого необходимо наличие специального технологически сложного и дорогостоящего производства,
- среда, заполняющая внутренний объем прибора, должна быть электрически прочной к напряжению до десятков киловольт,
- передаточная характеристика ДС имеет нелинейный характер.
Легкость массы обуславливает очень высокие требования к минимизации жесткости подвеса по измерительной оси, существенно влияет на стабильность нуля прибора.
Наиболее близким по технической сущности к предлагаемому изобретению является цифровой импульсный компенсационный акселерометр (патент США N 3913406, кл. 73-516) с неконтактным подвесом ИМ, содержащий датчик положения (ДП), ДС, статор и ротор цилиндрической газодинамической опоры (ГДО), электродвигатель для вращения ротора ГДО, и в котором ротор ГДО, ротор гистерезисного электродвигателя, ферромагнитные кольца ДС и ДП составляют ИМ акселерометра. В этом акселерометре наличие емкостного ДП приводит к появлению осевой составляющей электростатического тяжения, действующего между ферромагнитными кольцами, установленными на ИМ и обкладками емкостей, установленными на неподвижном корпусе; наличие гистерезисного двигателя приводит к появлению осевой составляющей магнитного тяжения, действующего между магнитотвердым ротором, установленным на ИМ и магнитомягким сплавом статора гистерезисного двигателя, установленного на корпусе; неравенство токов в обмотках электромагнитного ДС при действии ускорения приводит к разному тепловыделению в них и следовательно к перепадам давления нага на торцах ГДО (ИМ), что приводит к силовому воздействию газа на ИМ в осевом направлении. Указанные осевые силовые воздействия на ИМ не стабильны по времени и зависят от величины перемещения ИМ, что существенно снижает стабильность нуля и показаний прибора, увеличивает дрейф нуля прибора.
В осевой компенсационный цифровой акселерометр с неконтактным подвесом ИМ, содержащий статор и ротор цилиндрической ГДО, электродвигатель для вращения ротора ГДО, ДС, ДП, для повышения длительной стабильности нуля и снижения дрейфа нуля прибора предлагается: ротор ГДО и магнитопровод магнитоэлектрического дифференциального ДС выполнить как одну деталь из магнитомягкого сплава, что повышает конструктивную стабильность ИМ и увеличивает коэффициент преобразования ДС; дифференциальный фотоэлектрический ДП выполнить разнесенным по оси акселерометра с двумя парами фотодиод-светодиод и с двумя парами подвижная-неподвижная шторка, что исключает влияние нестабильности размеров ИМ в осевом направлении на выходной сигнал ДП; внутренний объем акселерометра выполнить разделенным на два равных газовых объема, которые соединить, помимо кольцевого зазора между статором и ротором ГДО, отверстием с регулируемой винтом-вентилем величиной, что обеспечивает регулируемое демпфирование осевых колебаний ИМ; электродвигатель для вращения ротора ГДО выполнить асинхронным с полыми роторами из немагнитного сплава с малыми омическим сопротивлением и удельным весом, что снижает осевую составляющую тяжения между статором и ротором электродвигателя, выполнить разнесенным с двумя статорами, двумя полыми немагнитными роторами, и двумя кольцами из магнитомягкого сплава, установленными в каждом из газовых объемов, что исключает температурный градиент и перепад давления газа по оси прибора, перетекание газа из одного объема в другой, и таким образом исключается силовое воздействие газа на ИМ в осевом направлении; подвижные шторки ДП и полые ротора асинхронного двигателя выполнить как единые детали, что повышает конструктивную стабильность ИМ.
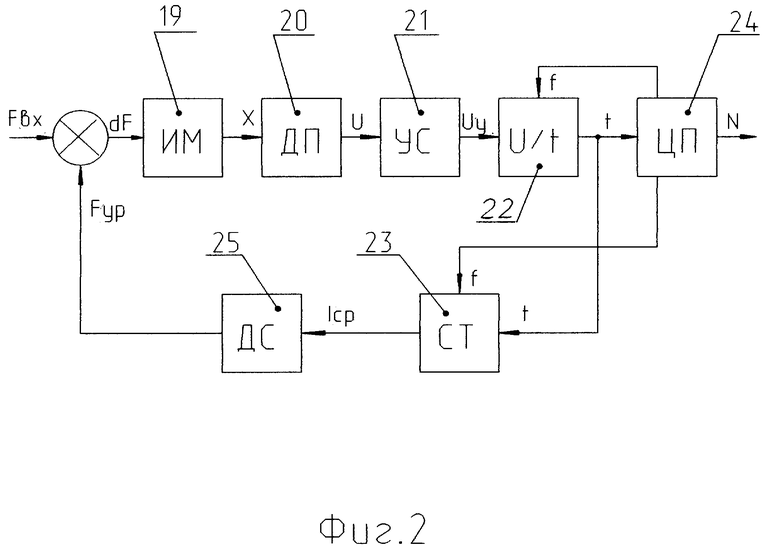
На фиг. 1 изображен общий вид осевого компенсационного цифрового акселерометра с неконтактным подвесом инерционной массы без электронных преобразователей.
На фиг. 2 изображена структурная схема осевого компенсационного цифрового акселерометра с неконтактным подвесом инерционной массы.
Осевой компенсационный цифровой акселерометр с неконтактным подвесом ИМ состоит из следующих основных элементов и узлов (см. фиг. 1, фиг. 2):
Элементы цилиндрической ГДО, состоящие из неподвижного керамического статора 1 ГДО, подвижного ротора 1 ГДО, выполненного из магнитомягкого материала, статоров 3 асинхронного двигателя для вращения ротора ГДО, полых роторов 4 асинхронного двигателя, выполненных в виде тонкостенных цилиндров из немагнитного сплава с малыми омическим сопротивление и удельным весом и закрепленных на роторе 2 ГДО; колец 5 из магнитомягкого сплава, служащих для формирования магнитных потоков статоров асинхронного двигателя.
Магнитоэлектрический датчик силы (ДС) 25 дифференциального типа, состоящий из цилиндрических катушек 6, установленных неподвижно на корпусных деталях и магнитной системы ДС 25, включающей в себя магнитопровод (ротор 2 ГДО), цилиндрические постоянные магниты 7 из высококоэрцитивного закритического материала, полюсные наконечники 8 из магнитомягкого материала.
Фотоэлектрический датчик положения (ДП) 20 разнесенный дифференциального типа, состоящий из источников изучения- двух светодиодов (СД) 9, установленных на корпусной детали, приемников излучения - двух фотодиодов (ФД) 10, установленных в тех же что и светодиоды корпусных деталях и соосно с ними и составляющих фотопару фотодиод-светодиод, неподвижных шторок 11, установленных на корпусных деталях со светодиодами и фотодиодами, подвижных шторок 12, являющихся торцами полых роторов 4 и составляющих пару подвижная-неподвижная шторка. Шторки предназначены для перекрытия части светового потока, идущего от светодиода на светочувствительную площадку фотодиода.
Подвижные элементы ГДО, ДС, ДП составляют единую конструкцию - инерционную массу (ТМ) 19 акселерометра.
Элементы для газового демпфирования осевых колебаний ИМ, состоящие из двух объемов 13, 14, связанных посредством отверстия 15, величина которого регулируется винтом-вентилем 16.
Корпус-термостат 17 для установки узлов и деталей и поддержания постоянной температуры внутреннего объема чувствительного элемента акселерометра.
Внешние магнитные экраны 18 для исключения влияния внешних магнитных полей.
Усилитель (УС) 21 для усиления сигнала ФД и формирования амплитудно-частотной характеристики акселерометра.
Преобразователь (U/t) 22 для преобразования аналогового сигнала усилителя в последовательность импульсов с периодом пропорциональным величие входного напряжения, называемой временным интервалом.
Прецизионный импульсный стабилизатор тока (СТ) 23 для формирования тока с широтно-импульсной модуляцией.
Преобразователь (ЦП) 24 для преобразования временного интервала с преобразователя (U/t 22) в двоичный цифровой код.
Акселерометр работает следующим образом, - при вращении с помощью асинхронного двигателя ротора ГДО 2 (вращения ИМ 19) в клиновидный зазор между ротором 2 и статором 1 вгоняется газ, увлекаемый поверхностью ротора. В результате сжатия в клиновидном зазоре возникает повышенное давление газа, которое и отделяет (взвешивает) ротор 2 ГДО от статора 1, то есть таким образом реализуется неконтактный подвес ИМ 19. При отсутствии ускорения действующего по измерительной оси, сигналы с ФД 10 одинаковые и равны U0, а так как фотодиоды включены по дифференциальной семе, то разностный сигнал с ДП 20 равен нулю. При действии ускорения по измерительной оси Fвх ИМ 19 начинает перемещаться вдоль этой оси на величину X, перемещаются подвижные шторки 13, в результате чего засветка ФД, в сторону которого движется шторка уменьшается и сигнал с него будет U1 = U0-δUф и соответственно сигнал с другого ФД увеличивается на равную величину U2 = U0+δUф, разностный сигнал с ДП U= U2-U1. При осевом удлинении или сжатии ИМ 19 в результате воздействия температуры или старения материалов засветка обоих ФД увеличивается или уменьшается на равную величину и соответственно сигнал с ДП 20 U=0. Сигнал U с ДП 20 подается на вход усилителя (УС) 21, имеющего определенную амплитудно-частотную характеристику. Усиленный сигнал с УС 21 Uy поступает на вход преобразователя (U/t) 22, который преобразует его во временной интервал t, длительность которого пропорциональна величине Uy. Сигнал t с преобразователя (U/t) 22 поступает на цифровой преобразователь (ЦП) 24, который синхронизирует работу преобразователя (U/t) 22 и импульсного стабилизатора тока (СТ) 23, производит осреднение временного интервала, преобразование его в выходной сигнал акселерометра в виде двоичного цифрового кода N и формирует совместно с преобразователем (U/t) 22 сигнал обратной связи f, управляющий ключевой схемой импульсного прецизионного стабилизатора тока (СТ) 23 с широтно-импульсной модуляцией, которая подключает СТ 23 к обмоткам ДС 25. Ток с широтно-импульсной модуляцией на выходе СТ Iср создает в ДС 25 импульсную силу, среднее значение которой Fур в установившемся режиме уравновешивает входную инерционную силу Fвх с точностью до величины недокомпенсации dF, при этом мощность, выделяемая в обмотках ДС 25, постоянна и не зависит от величины действующего ускорения. Осевые колебания ИМ 19 акселерометра, вносящие погрешность в измерение, демпфируются с помощью газового демпфирования: газ инерционной массой как поршнем выдавливается из одного объема 13 (14) в другой 14 (13) через отверстие 15, величина которого определяет величину демпфирования и устанавливается в процессе регулировки с помощью винта-вентиля 16, в зависимости от требуемой динамической характеристики акселерометра.
Заявляемый осевой компенсационный цифровой акселерометр с неконтактным подвесом инерционный массы имеет высокую длительную стабильность нуля и малый дрейф нуля, которые соответственно составляют ~ 10-7g; ~ 10-7g/сутки, что подтверждается экспериментальными проверками опытного образца прибора и делает перспективным применение этого прибора для прецизионных измерений ускорений при любой ориентации измерительной оси.
| название | год | авторы | номер документа |
|---|---|---|---|
| ДИНАМИЧЕСКИ НАСТРАИВАЕМЫЙ ГИРОСКОП | 1999 |
|
RU2157965C1 |
| МАГНИТОЭЛЕКТРИЧЕСКИЙ ДВИГАТЕЛЬ ГИРОСКОПА | 1996 |
|
RU2118795C1 |
| ГИРОИНТЕГРАТОР ЛИНЕЙНЫХ УСКОРЕНИЙ | 1995 |
|
RU2097701C1 |
| АКСЕЛЕРОМЕТР | 1983 |
|
RU2046345C1 |
| ДАТЧИК УСКОРЕНИЯ | 2005 |
|
RU2280876C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ЛИНЕЙНОЙ И УГЛОВОЙ СКОРОСТЕЙ И УГЛОВ ПОВОРОТА ДВИЖУЩЕГОСЯ ОБЪЕКТА | 1994 |
|
RU2097700C1 |
| ДИНАМИЧЕСКИ НАСТРАИВАЕМЫЙ ГИРОСКОП | 2004 |
|
RU2248524C1 |
| УСТРОЙСТВО ДЛЯ ВОСПРОИЗВЕДЕНИЯ УГЛОВОГО ДВИЖЕНИЯ | 2001 |
|
RU2206899C1 |
| Универсальный прецизионный мехатронный стенд с инерциальными чувствительными элементами для контроля гироскопических измерителей угловой скорости | 2022 |
|
RU2804762C1 |
| СПОСОБ ГИДРОДИНАМИЧЕСКОГО ПОДВЕСА РОТОРА ГИРОМОТОРА ПОПЛАВКОВОГО ГИРОСКОПА (ВАРИАНТЫ) И СПОСОБ ЗАПОЛНЕНИЯ ЦИЛИНДРИЧЕСКОГО ГИДРОДИНАМИЧЕСКОГО ПОДВЕСА РОТОРА ГИРОМОТОРА ПОПЛАВКОВОГО ГИРОСКОПА НЕСМЕШИВАЮЩИМИСЯ ЖИДКОСТЯМИ | 2004 |
|
RU2272252C1 |
Акселерометр предназначен для измерения линейного ускорения движения объекта при любой ориентации измерительной оси, а также для измерения ускорения силы тяжести в гравиметрических приборах. Ротор газодинамической опоры и магнитопровод магнитной системы датчика силы выполнены как единая деталь из магнитомягкого сплава. Дифференциальный фотоэлектрический датчик положения выполнен разнесенным по оси акселерометра с двумя парами фотодиод-светодиод и двумя парами неподвижная-подвижная шторки. Внутренний объем акселерометра разделен на два равных газовых объема, соединенных отверстием. Асинхронный электродвигатель для вращения ротора опоры выполнен разнесенным с двумя статорами, двумя полыми роторами, двумя кольцами из магнитомягкого сплава. Кольца симметрично установлены в каждом из объемов. Подвижные шторки и полые роторы выполнены как единые детали. Акселерометр имеет высокую длительную стабильность нуля и малый дрейф нуля. 2 ил.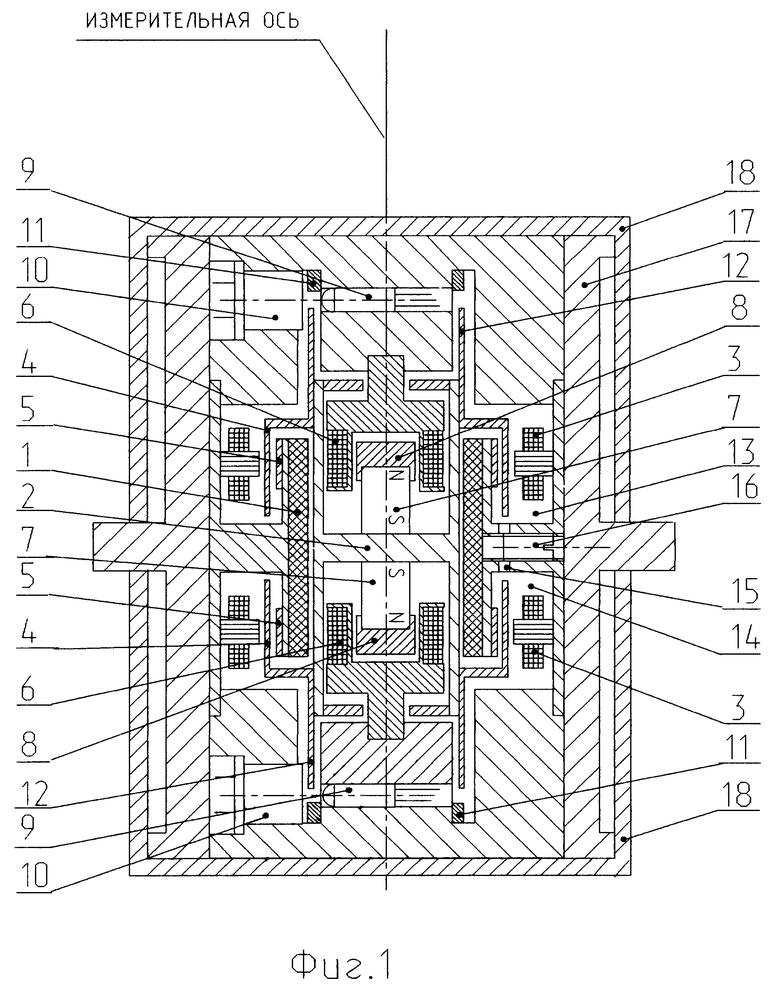
Осевой компенсационный цифровой акселерометр с неконтактным подвесом инерционной массы, содержащий ротор и статор цилиндрической газодинамической опоры, электродвигатель для вращения ротора газодинамической опоры, датчик силы, датчик положения, отличающийся тем, что ротор газодинамической опоры и магнитопровод магнитной системы магнитоэлектрического датчика силы выполнены как одна деталь из магнитомягкого сплава, диференциальный фотоэлектрический датчик положения выполнен разнесенным по оси акселерометра с двумя парами фотодиод - светодиод и двумя парами неподвижная - подвижная шторки, внутренний объем акселерометра разделен на два равных газовых объема, соединенных между собой с помощью отверстия, величина которого может регулироваться винтом-вентилем; электродвигатель для вращения ротора газодинамической опоры выполнен асинхронным с полыми роторами из немагнитного сплава с малыми омическим сопротивлением и удельным весом, выполнен разнесенным с двумя статорами, двумя полыми роторами, двумя кольцами из магнитомягкого сплава, симметрично установленными в каждом из объемов, подвижные шторки датчика положения и полые роторы асинхронного двигателя выполнены как единые детали.
| US 3913406 A, 21.10.75 | |||
| СПОСОБ ПОЛУЧЕНИЯ КРУПНОРАЗМЕРНЫХ ЦЕМЕНТНО-ВОЛОКНИСТЫХ ПЛИТ | 2003 |
|
RU2250821C2 |
| Приспособление в пере для письма с целью увеличения на нем запаса чернил и уменьшения скорости их высыхания | 1917 |
|
SU96A1 |
| СВЕРХПРОВОДЯЩИЙ ВЫСОКОТЕМПЕРАТУРНЫЙ АКСЕЛЕРОМЕТР | 1992 |
|
RU2049338C1 |
| Линейный акселерометр | 1978 |
|
SU670896A1 |
