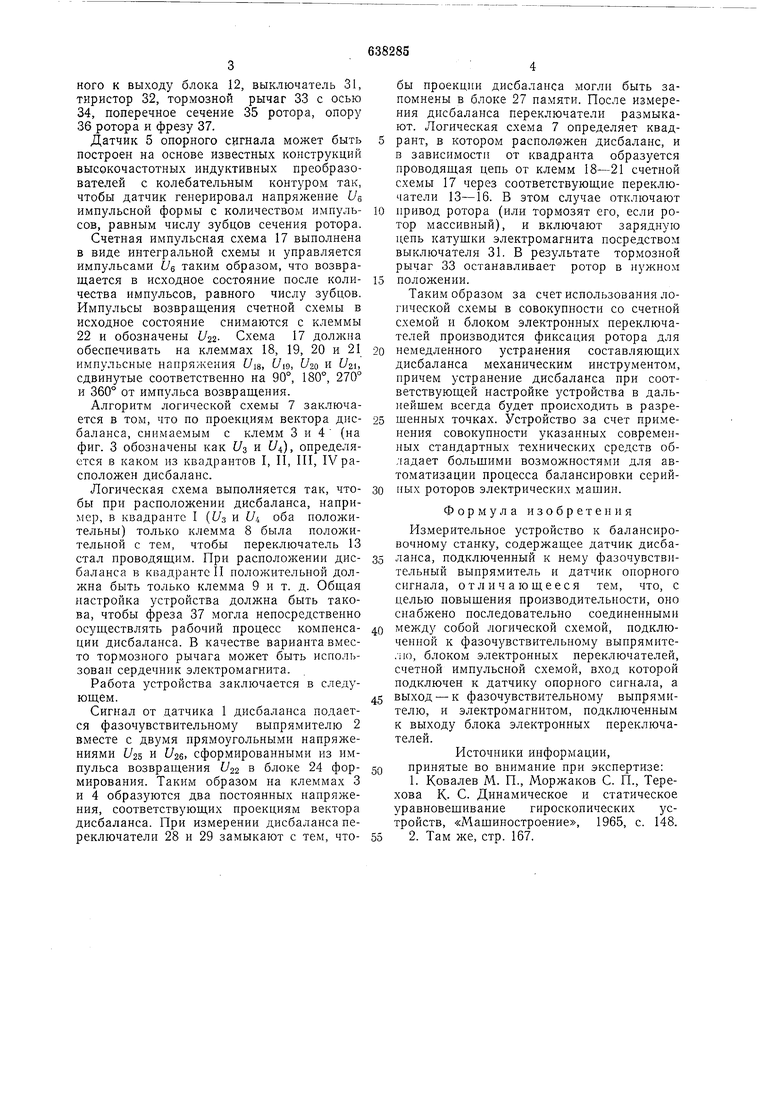
Horo к выходу блока 12, выключатель 31, тиристор 32, тормозной рычаг 33 с осью 34, поперечное сечение 35 ротора, опору 36 ротора и фрезу 37,
Датчик 5 опорного сигнала может быть построен на основе известных конструкций высокочастотных индуктивных преобразователей с колебательным контуром так, чтобы датчик генерировал напряжение U импульсной формы с количеством импульсов, равным числу зубцов сечения ротора.
Счетная импульсная схема 17 выполнена в виде интегральной схемы и управляется импульсами UQ таким образом, что возвращается в исходное состояние после количества импульсов, равного числу зубцов. Импульсы возвращения счетной схемы в исходное состояние снимаются с клеммы 22 и обозначены t/22- Схема 17 должна обеспечивать на клеммах 18, 19, 20 и 21 импульсные напряжения f/is, f/io, и 721, сдвинутые соответственно на 90°, 180°, 270° и 360° от импульса возвращения.
Алгоритм логической схемы 7 заключается в том, что по проекциям вектора дисбаланса, снимаемым с клемм 3 и 4 (на фиг. 3 обозначены как t/з и И), определяется в каком из квадрантов I, II, III, IV расположен дисбаланс.
Логическая схема выполняется так, чтобы при расположении дисбаланса, например, в квадранте I ( и U/, оба положительны) только клемма 8 была положительной с тем, чтобы переключатель 13 стал проводящим. При расположении дисбаланса в квадранте II положительной должна быть только клемма 9 и т. д. Общая настройка устройства должна быть такова, чтобы фреза 37 могла непосредственно осуществлять рабочий процесс компенсации дисбаланса. В качестве вариаита вместо тормозного рычага может быть использован сердечник электромагнита.
Работа устройства заключается в следующем.
Сигнал от датчика 1 дисбаланса подается фазочувствительному выпрямителю 2 вместе с двумя прямоугольными напряжениями 1/25 и f/26 сформированными из импульса возвращения /22 в блоке 24 формирования. Таким образом на клеммах 3 и 4 образуются два постоянных напряжения, соответствующих проекциям вектора дисбаланса. При измерении дисбаланса переключатели 28 и 29 замыкают с тем, чтобы проекции дисбаланса могли быть запомнены в блоке 27 памяти. После измерения дисбаланса переключатели размыкают. Логическая схема 7 определяет квадрант, в котором расположен дисбаланс, и в зависимости от квадранта образуется проводящая цепь от клемм 18-21 счетной схемы 17 через соответствующие переключатели 13-16. В этом случае отключают
привод ротора (или тормозят его, если ротор массивный), и включают зарядную цепь катушки электромагнита посредством выключателя 31. В результате тормозной рычаг 33 останавливает ротор в нужном
положении.
Таким образом за счет использования логической схемы в совокупности со счетной схемой и блоком электронных переключателей производится фиксация ротора для
немедленного устранения составляющих дисбаланса механическим инструментом, причем устранение дисбаланса при соответствующей настройке устройства в дальнейшем всегда будет происходить в разрешенных точках. Устройство за счет применения совокупности указанных современных стандартных технических средств обладает большими возможностями для автоматизации процесса балансировки серийиых роторов электрических машин.
Формула изобретеиия
Измерительное устройство к балансировочному станку, содержащее датчик дисбаланса, подключенный к нему фазочувствительный выирямитель и датчик опорного сигнала, отличающееся тем, что, с целью повышения производительности, оно снабжено последовательно соединенными
между собой логической схемой, подключенной к фазочувствительному выпрямите.iio, блоком электронных переключателей, счетной импульсной схемой, вход которой подключен к датчику опориого сигнала, а
выход - к фазочувствительному выпрямителю, и электромагнитом, подключенным к выходу блока электронных переключателей.
Источники информации,
принятые во внимание при экспертизе:
1. Ковалев М. П., Моржаков С. П., Терехова К- С. Динамическое и статическое уравиовешивание гироскопических устройств, «Машиностроение, 1965, с. 148.
2. Там же, стр. 167.
J7
| название | год | авторы | номер документа |
|---|---|---|---|
| СТЕНД ДЛЯ ДИНАМИЧЕСКОЙ БАЛАНСИРОВКИ КОЛЕС | 1991 |
|
RU2036449C1 |
| Способ балансировки роторов | 1973 |
|
SU795520A3 |
| ИНДУКТОРНЫЙ ГЕНЕРАТОР С СОВМЕЩЕННЫМИ ОБМОТКАМИ ВОЗБУЖДЕНИЯ И СТАТОРА | 2019 |
|
RU2702615C1 |
| Преобразователь угловых перемещений в код | 1985 |
|
SU1311024A1 |
| ИНДУКТОРНАЯ ЭЛЕКТРИЧЕСКАЯ МАШИНА | 2017 |
|
RU2662233C1 |
| ТОПЛИВОИЗМЕРИТЕЛЬНОЕ УСТРОЙСТВО ТРАНСПОРТНОГО СРЕДСТВА | 1990 |
|
RU2081398C1 |
| Преобразователь угла поворота вала в код | 1983 |
|
SU1115080A1 |
| Вентильный электродвигатель | 1984 |
|
SU1257770A1 |
| Агрегат гарантированного питания | 1990 |
|
SU1742942A1 |
| Вентильный электродвигатель | 1989 |
|
SU1670753A2 |
. rLi...U
