Изобретение относится к балансировочной технике и может быть использовано в низкоскоростных стендах для балансировки автомобильных колес с ручным приводом.
Известны стенды для динамической балансировки колес автомобилей с электромеханическим приводом, обеспечивающим стабильную скорость вращения балансируемого колеса при измерении величины дисбаланса по двум плоскостям балансировки [1] [2]
Эти стенды содержат вращающийся в подшипниках шпиндель, на котором крепится балансируемое колесо. Подшипники разнесены по длине шпинделя и связаны с основанием стенда через упругие элементы, ограничивающие линейные перемещения шпинделя в местах установки подшипников в направлении, перпендикулярном оси шпинделя. На упругих элементах установлены датчики линейных перемещений, преобразующие эти перемещения в электрический сигнал. Стенды содержат также импульсный датчик, обеспечивающий определение угла поворота шпинделя. Стенды снабжены электронными блоками измерения величины дисбаланса и определения положения дисбаланса по двум выбранным плоскостям балансировки. В стендах используется привод шпинделя от электрического двигателя. Величина дисбаланса по каждой плоскости балансировки определяется в электронном блоке измерения величины дисбаланса выделением среднего значения сигнала после его детектирования. Замеренная величина дисбаланса выводится на индикатор.
В таких стендах с электрическим приводом устанавливается достаточно высокая и постоянная скорость вращения шпинделя, что обеспечивает необходимое соотношение сигнал-шум и не требует дополнительных функциональных преобразований сигнала, связанных с величиной скорости вращения.
Однако наличие электромеханического привода помимо усложнения устройства влечет за собой повышенную трудоемкость и продолжительность процесса балансировки, а также низкий уровень безопасности работы на стенде.
Известен также балансировочный стенд с ручны приводом, в котором указанные недостатки отсутствуют [3] Этот стенд отличается отсутствием электромеханического привода, плоскими упругими элементами линейного перемещения опор шпинделя и характеризуется малыми рабочими скоростями вращения шпинделя, а также неопределенностью и нестабильностью этой скорости в процессе измерения.
Такой стенд имеет ограниченную точность, связанную с малой величиной полезного сигнала относительно уровня шумов, а также с погрешностью, вызванной отклонением фактической скорости вращения колеса от ее номинального значения при каждом измерении и искажением гармонического закона изменения измеряемого сигнала при вращении колеса по инерции.
Технический результат изобретения повышение точности балансировки путем повышения соотношения сигнал-шум при измерении дисбаланса на малых скоростях вращения колеса и исключение влияния на точность измерения нелинейных искажений гармонического сигнала.
Сущность изобретения заключается в том, что в стенд для динамической балансировки колес, содержащий основание, шпиндель с балансируемым колесом, втулку, закрепленную на основании через два упругих элемента, два датчика деформации упругих элементов, импульсный датчик поворота шпинделя и соединенный с ним блок регистрации скорости вращения шпинделя, блок отображения информации, соединенный с блоком регистрации скорости, измерительную схему, соединенную с датчиками деформации, импульсным датчиком и блоком отображения информации, введено промежуточное звено в виде двухсторонней вилки, упругие элементы выполнены в виде торсионов, а датчики деформации в виде датчиков угловых перемещений, причем промежуточное звено на одной стороне одним торсионом через зубцы вилки связано с основанием, а на другой стороне другим торсионом с втулкой, торсионы расположены в вертикальной плоскости и перпендикулярны оси шпинделя, шпиндель установлен во втулке, а датчики угла в местах закрепления торсионов, измерительная схема включает схему разложения дисбаланса по плоскостям балансировки, блок определения места дисбаланса, генератор тактовых импульсов и два канала преобразования, причем схема разложения связана с датчиками угловых перемещений, а выходами с каналами преобразования и блоком определения места, генератор тактовых импульсов связан с блоком регистрации скорости и блоком отображения информации, а импульсный датчик связан с блоком определения места.
Кроме того, каждый канал преобразования содержит два компаратора, два интегратора, три счетных триггера, регистр сдвига с объемом разрядов, равным числу импульсов на один оборот импульсного датчика поворота шпинделя, схему ИЛИ, четыре электронных ключа, источник эталонного напряжения, разделительную емкость, причем в каждом канале преобразования аналоговый вход первого электронного ключа соединен с прямым выходом соответствующего канала схемы разложения дисбаланса и через разделительную емкость с прямым входом первого компаратора, аналоговый вход второго электронного ключа с инверсным выходом соответствующего канала схемы разложения, выходы первого и второго электронных ключей соединены между собой и с аналоговым входом первого интегратора, выход первого интегратора через третий электронный ключ присоединен к прямому входу второгоо интегратора, выход которогоо соединен с прямым входом второго компаратора, инверсный счетный вход первого счетного триггера соединен с выходом блока регистрации скорости вращения шпинделя, прямой счетный вход регистра сдвига с выходом датчика импульсов, выходы первого компаратора и первого счетного триггера присоединены соответственно к счетному и разрешающему входам второго счетного триггера, прямой выход которого соединен с входом разрешения сдвига регистра, а его инверсный выход с входом записи регистра сдвига, вход первого разряда данных регистра сдвига присоединен к уровню логической единицы, выходы разрядов, составляющих четверть и три четверти от объема разрядов регистра сдвига, соединены соответственно с цифровыми входами первого и второго электронных ключей и с двумя входами схемы ИЛИ, выход схемы ИЛИ соединен с цифровым входом третьего ключа и с инверсным входом установки нуля первого интегратора, выход старшего разряда регистра сдвига присоединен к входу установки нуля первого счетного триггера и к прямому счетному входу третьего счетного триггера, выход которого соединен с цифровым входом четвертого электронного ключа, источник эталонного напряжения присоединен к инверсному входу второго интегратора через четвертый электронный ключ, инверсный вход установки нуля третьего счетного триггера соединен с выходом второго компаратора, а инверсные входы обоих компараторов присоединены к общей точке с нулевым потенциалом.
Стенд также имеет блок отображения информации, который выполнен в виде двух счетчиков импульсов, мультиплексора, дешифратора, цифрового индикатора и переключателя, причем счетные входы обоих счетчиков присоединены к выходу генератора тактовых импульсов, входы разрешения счета первого и второго счетчиков соответственно присоединены к выходу третьего счетного триггера соответствующего канала преобразования, а входы установки нуля этих счетчиков к выходу схем ИЛИ соответстующего канала преобразования, выходы счетчиков через мультиплексор и дешифратор подключены к цифровому индикатору, два вывода переключателя соединены с двумя входами выбора канала мультиплексора, вход гашения дешифратора соединен с выходом блока регистрации скорости.
Кроме того, блок регистрации скорости вращения стенда выполнен в виде двух дополнительных счетчиков импульсов и двух D-триггеров, причем счетный вход первого дополнительного счетчика импульсов соединен с выходом импульсного датчика поворота шпинделя, счетный вход второго дополнительного счетчика импульсов с выходом генератора тактовых импульсов, выход старшего разряда первого дополнительного счетчика импульсов присоединен к входу записи данных второго дополнительного счетчика импульсов и к инверсному счетному входу второго D-триггера, выход старшего разряда второго дополнительного счетчика импульсов соединен с прямым счетным входом первого D-триггера, прямой выход которого соединен к входу данных второго D-триггера, входы установки нуля первого дополнительного счетчика импульсов и обоих D-триггеров соединены с выходом переноса второго дополнительного счетчика импульсов, вход данных первого D-триггера присоединен к уровню логической единицы, инверсный выход второго D-триггера присоединен к входам разрядов данных второго дополнительного счетчика импульсов, а его прямой выход является выходом блока регистрации скорости вращения.
Выполнение упругих элементов в виде торсионов, а датчиков деформации в виде датчиков угловых перемещений позволяет повысить точность измерения дисбаланса. Торсион как упругий элемент характеризуется высокой линейностью зависимости деформации от момента, отсутствием люфтов и сухого трения в местах сопряжения упругого элемента с конструкцией стенда. Кроме того, ротор и статор датчика углового перемещения могут быть выполнены достаточно большого диаметра и обеспечить высокую крутизну в измерении малых угловых деформаций для достижения высокого соотношения сигнал-шум. Дополнительным техническим результатом использования торсиона и датчика углового перемещения является большая надежность устройства, так как применяемые в известных устройствах в качестве датчиков малых деформаций пьезодатчики характеризуются хрупкостью и поэтому малой надежностью в условиях эксплуатации.
Элементы, входящие в состав канала преобразования позволяют повысить точность предлагаемого стенда по сравнению с известными, полностью исключив погрешность от неравномерности вращения балансируемого колеса в балансировочных стендах с ручным приводом.
Конкретное выполнение блока отображения информации и блока измерения скорости вращения позволяет упростить устройство за счет использования для преобразования аналогового сигнала в цифровой вид и его отображения второго интегратора, второго компаратора, третьего триггера, регистра сдвига и источника эталонного напряжения, а также организовать автоматический цикл измерений дисбаланса в уловиях переменной скорости вращения шпинделя.
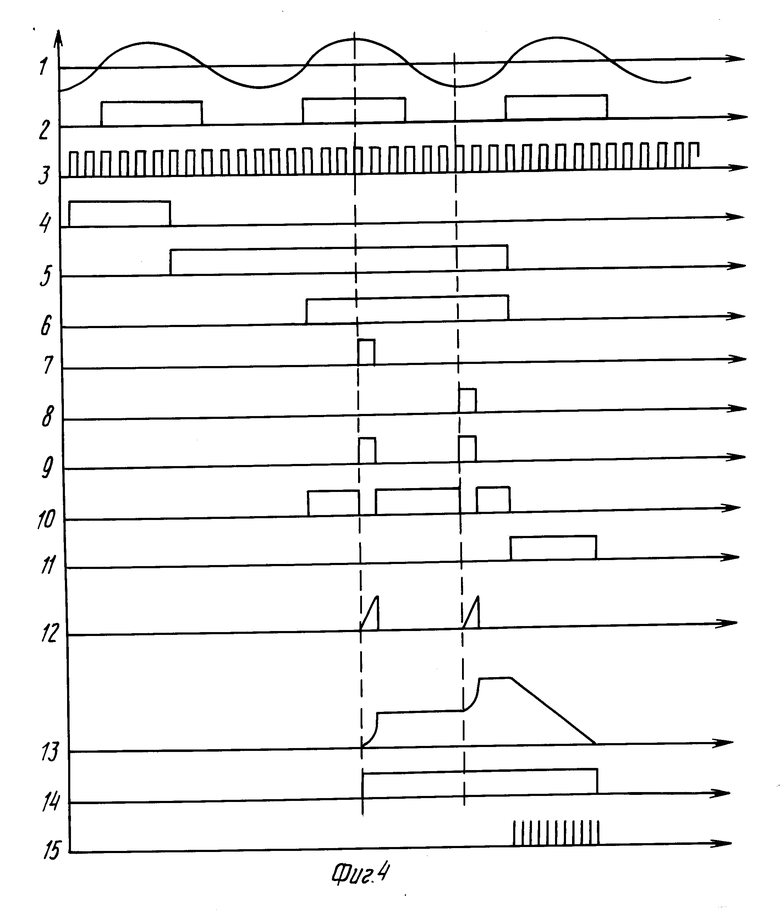
На фиг.1 показана механическая часть стенда; на фиг.2 схема электронной части стенда; на фиг.3 схема блока регистрации скорости вращения; на фиг.4 временные диаграммы работы узлов устройства; на фиг.5 схема, поясняющая принцип измерения дисбаланса по двум плоскостям балансировки.
Блоки, выполняющие логические операции, реализуемые на базе комбинации современных элементов цифровой техники и охватываются существующими стандартами СТ СЭВ 3735-82 и ГОСТ 2.743-82.
Стенд содержит шпиндель 1 с закрепленным на нем балансируемым колесом 2. Шпиндель установлен во втулке 3 на подшипниковых опорах 4. Втулка связана с основанием 5 стенда через промежуточное звено 6 и два торсиона 7 и 8, причем одним концом промежуточное звено через торсион 7 закреплено на основании, а на другом конце промежуточного звена через торсион 8 закреплена втулка 3 со шпинделем 1. В местах закрепления торсионов 7 и 8 установлены соответственно датчики 9 и 10 угла закрутки торсионов. Н валу шпинделя установлен датчик 11 импульсов поворота шпинделя относительно втулки 3.
Электронная часть стенда содержит схему 12 разложения дисбаланса по плоскостям балансировки, схему измерения дисбаланса с двумя идентичными каналами 13 и 14 преобразования, блок 15 определения места дисбаланса, блок 16 регистрации скорости вращения, генератор 17 импульсов и блок 18 отображения информации.
Схема 12 разложения дисбаланса по плоскостям балансировки состоит из двух суммирующих усилителей 19 и 20, имеющих прямые и инверсные выходы. Два входа каждого усилителя соединены соответственно с выходами датчиков 9 и 10 угла. Весовые коэффициенты и их знаки для каждого входа установлены таким образом, чтобы амплитуда сигнала с каждого усилителя зависела только от величины дисбаланса по одной из плоскостей балансировки. Прямые выходы усилителей 19 и 20 соединены с входами блока 15 определения места дисбаланса и с аналоговыми входами первых электронных ключей 21 и через разделительные емкости 22 с входами первых компараторов 23 двух каналов 13 и 14 преобрзования соответственно. Инверсные выходы усилителей присоединены к аналоговым входам вторых электронных ключей 24 каналов преобразования.
Каждый канал преобразования содержит также два интегратора 25 и 26, второй компаратор 27 и источник 28 эталонного напряжения. Выход первого интегратора 25 соединен через третий электронный ключ 29 с прямым входом второго интегратора 26. Вход первого интегратора соединен с выходами первого и второго электронных ключей, а выход второго интегратора с входом второго компаратора. Источник 28 эталонного напряжения присоединен к инверсному входу второго интегратора 26 через четвертый электронный ключ 30. В каждый канал преобразования входят также первый 31, второй 32 и третий 33 счетные триггеры, регистр 34 сдвига и схема ИЛИ 35. Инверсные счетные входы первых счетных триггеров 31 обоих каналов преобразования соединены с выходом блока 16 регистрации скорости вращения. В каждом канале преобразования выход первого счетного триггера соединен с входом разрешения счета второго счетного триггера 32, счетный вход которого присоединен к выходу первого компаратора 23. Прямой выход триггера 32 соединен с входом разрешения сдвига, а его инверсный выход с входом записи регистра 34. Счетные входы регистров сдвига обоих каналов присоединены к выходу импульсного датчика 11, а их входы установки первого разряда присоединены к уровням логичесокй единицы. Выходы регистра, составляющие 1/4 и 3/4 от его объема, являются управляющими для электронных ключей 21 и 24 и через схему ИЛИ 35 для ключа 29, выход третьего триггера 33 для ключа 30. Выход старшего разряда регистра соединен со счетным входом триггера 33 и входом установки нуля триггера 31.
Блок отображения информации содержит два счетчика 36 и 37 импульсов, мультиплексоров 38, переключатель 39, дешифратор 40 и индикатор 41. Счетные входы счетчиков импульсов присоединены к генератору 17 тактовых импульсов. Входы разрешения счета первого и второго счетчиков соединены с выходами третьих счетных триггеров 33 соответствующих каналов преобразования, а входы установки нуля с выходом схемы ИЛИ 35. Поразрядно выходы счетчиков через мультиплексор присоединены к входу дешифратора 40. Входы выбора мультиплексора присоединены к переключателю 39. Выходы дешифратора 40 соединены с индикатором 41, вход гашения дешифратора соединен с выходом блока 16 регистрации скорости.
В блок 16 регистрации скорости вращения входят два дополнительных счетчика 42 и 43 импульсов и два D-триггера 44 и 45. Счетные входы счетчиков 42 и 43 присоединены соответственно к выходам импульсного датчика 11 и генератора 17 тактовых импульсов. Выход второго D-триггера 45 является выходом блока.
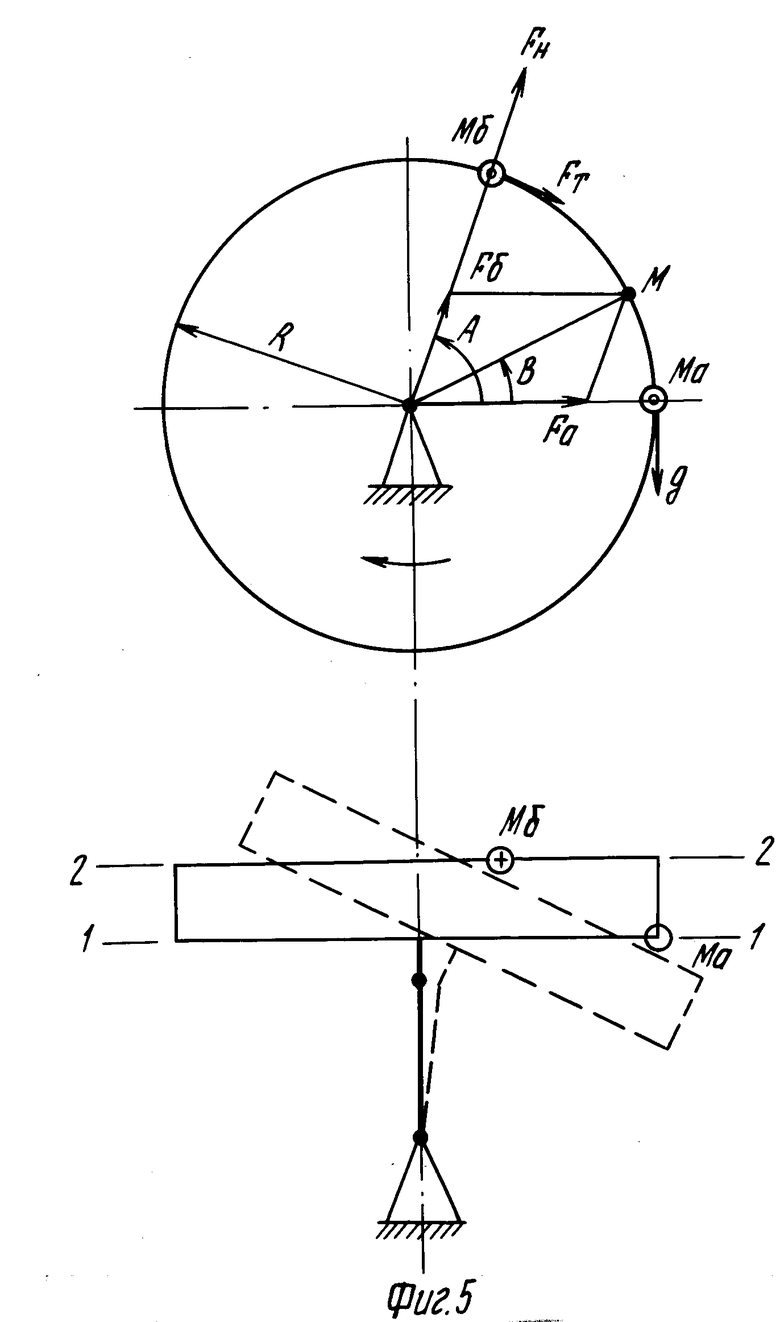
На схеме, поясняющей принцип работы стенда, показаны две несбалансированные массы Ма и Мб, приведенные к плоскостям балансировки колеса 1-1 и 2-2. Масса статического дисбаланса М на радиусе колеса R является геометрической суммой этих несбалансированных по плоскостям балансировки масс. При неравномерном вращении колеса в процессе измерения дисбаланса на каждую несбалансированную массу действуют нормальная Fн и тангенциальная Fт силы.
Работа стенда основана на измерении горизонтальных составляющих центробежных (нормальных) сил при наличии несбалансированных масс, действующих на упругие элементы, по их деформации. Известно, что несбалансированные распределенные массы колеса можно привести к двум сосредоточенным массам, расположенным по двум выбранным плоскостям балансировки на расстоянии R от оси вращения колеса.
В стендах с ручным приводом измерение дисбаланса осуществляется на вращающемся по инерции балансируемом колесе, при этом на закон вращения колеса влияет смещение центра масс относительно оси вращения (статический дисбаланс). Статический дисбаланс зависит от несбалансированных по плоскостям колеса масс (фиг.5) и относительно массы Ма описывается следующими математическими выражениями:
M  , (1)
, (1)
B= arctg  , (2) где А угол между радиус-векторами масс дисбаланса в плоскостях балансировки;
, (2) где А угол между радиус-векторами масс дисбаланса в плоскостях балансировки;
В угол между радиус-векторами измеряемой массы Ма и массы статического дисбаланса Мб.
Дифференциальное уравнение свободного вращения колеса при наличии статического дисбаланса имеет вид
J +M·g·Rcos(c+в)=0, (3) где Jо осевой момент инерции колеса;
+M·g·Rcos(c+в)=0, (3) где Jо осевой момент инерции колеса;
С текущее значение угла поворота несбалансированной массы Ма;
g ускорение свбодного падения;
R расстояние от несбалансированных масс до оси вращения колеса.
Приняв  =ωo при С + В D, после однократного интегрирования получим:
=ωo при С + В D, после однократного интегрирования получим: = ω
= ω sin(c+в), (4) где ωo начальное значение угловой скорости вращения колеса.
sin(c+в), (4) где ωo начальное значение угловой скорости вращения колеса.
Проекции нормальной и тангенциальной сил на горизонтальную плоскость определяются выражениями
Fн= MаR cos(c), Fт= -MаR
cos(c), Fт= -MаR sin(c), (5) где Fн проекция нормальной составляющей силы на горизонтальную плоскость;
sin(c), (5) где Fн проекция нормальной составляющей силы на горизонтальную плоскость;
Fт проекция тангенциальной составляющей силы на горизонтальную плос- кость.
Суммируя проекции нормальной и тангенциальной силы и учитывая выражения (3) и (4), получим выражение измеряемой по плоскости балансировки 1-1 силы
F= Fн+Fт= MаR cos(c)
cos(c)  [sin(в)+3 sin(2c+в)]
[sin(в)+3 sin(2c+в)] , (6) где L (MgR)/(J ωo2) коэффициент, характеризующий влияние на результат измерения несбалансирвоанной массы по одной из плоскостей балансировки величины и взаимного углового расположения несбалансированной массы по другой плоскости. При L 0 взаимовлияние обеих масс отсутствует, выходной сигнал имеет гармонический характер и отсутствует погрешность измерения, вызванная взаимовлиянием несбалансированных масс.
, (6) где L (MgR)/(J ωo2) коэффициент, характеризующий влияние на результат измерения несбалансирвоанной массы по одной из плоскостей балансировки величины и взаимного углового расположения несбалансированной массы по другой плоскости. При L 0 взаимовлияние обеих масс отсутствует, выходной сигнал имеет гармонический характер и отсутствует погрешность измерения, вызванная взаимовлиянием несбалансированных масс.
Анализ выражений (1).(6) показывает
ошибка измерения от взаимовлияния двух масс является случайной и не может быть учтена при конкретном измерении;
коэффициент L (степень взаимовлияния) обратно пропорционален квадрату угловой скорости вращения колеса и существенен при малых скоростях вращения, характерных для стендов с ручным приводом;
погрешность от взаимовлияния несбалансированных масс имеет постоянную составляющую и составляющую, зависящую от двойного значения угла поворота.
Стенд работает следующим образом.
В исходном состоянии все триггеры, счетчики импульсов и интеграторы установлены в нулевое состояние. Испытуемое колесо 2 закрепляется на шпинделе 1 и вручную приводится во вращение. На выходе импульсного датчика 11 поворота шпинделя формируются импульсы для дискретных значений угла поворота. Шаг квантования по углу для датчика импульсов с числом импульсов N на один оборот шпинделя составляет (360/N) град.
Несбалансированные массы колеса при его вращении создают силы, перпендикулярные оси шпинделя 1. Проекции этих сил на горизонтальную плоскость определяют моменты, закручивающие торсионы 7 и 8. Величина деформации торсионов находится в линейной зависимости от величины несбалансированных масс, приведенных к двум выбранным плоскостям балансировки. Деформация торсионов воспринимается соответствующими датчиками 9 и 10 угла, сигналы которых содержат линейную комбинацию о несбалансированных массах по двум плоскостям балансировки. Сигналы с датчиков угла поступают на суммирующие усилители 19 и 20 схемы 12 разложения. Схема разложения осуществляет линейное преобразование сигналов с датчиков 9 и 10 таким образом, что на выходе каждого из суммирующих усилителей 19 и 20 сигналы в идеальном случае оказываются пропорциональными силам, действующим только в выбранных плоскостях балансировки (диаграмма 1 на фиг.4). Раздельно, как показано выше, сигнал искажается от взаимовлияния несбалансированных по плоскостям балансировки масс. Эти искажения не могут быть исключены схемой 12 разложения.
Сигналы с выходов усилителей 19 и 20 поступают на аналоговые входы электронных ключей 21 и 24 соответствующих каналов преобразования, при этом после отделения постоянной составляющей сигнала емкостями 22 сигнал с усилителей поступает на вход компараторов 23, который из сигнала формирует прямоугольные импульсы (диаграмма 2).
Процесс измерения дисбаланса осуществляется автоматически в процессе свободного выбега колеса после его ручной раскрутки. Начало цикла измерения задает блок 16 регистрации скорости.
При вращении шпинделя 1 импульсный датчик 11 положения формирует на своем выходе импульсы, соответствующие его дискретным угловым положениям (диаграмма 3). В блоке 16 регистрации скорости анализируется длительность определенного числа этих импульсов. Это число определяется объемом счетчика 42. Число импульсов тактовой частоты, накопленное счетчиком 43 за каждый цикл, характеризует скорость вращения шпинделя 1.
При недостаточной скорости вращения или неподвижном шпинделе счетчик 43 переполняется, при этом на его выходе переноса появляется логическая единица, устанавливающая оба D-триггера 44 и 45 в нулевое состояние и оставливающая счетчик 42. При раскрутке шпинделя скорость достигает такого состояния, что счетчик 43 не заполняется полностью, сигнала переноса нет, в то же время на выходе старшего разряда появляется логическая единица, переводящая оба D-триггера в едининчое состояние с трансляцией этого состояния на выход блока 16 регистрации скорости. Дальнейшее увеличение скорости вращения не изменяет состояния на выходе регистратора. После разгона шпинделя в режиме свободного выбега скорость вращения снижается и достигает величины, при которой счетчик 43 вновь заполняется полностью, и импульсом переноса D-триггеры перебрасываются в нулевое состояние, которое передается на выход регистратора.
Для исключения многократных срабатываний регистратора в условиях нестабильной скорости вращения шпинделя в нем организован гистерезис по скорости вращения с помощью связи инверсного выхода второго D-триггера 45 с разрядами предварительной установки счетчика 43. Такая связь в зависимости от состояния на выходе регистратора скорости изменяет объем счетчика 43. Гистерезис обеспечивает срабатывание регистратора на скорости вращения большей чем отпускание.
Таким образом, при ручной раскрутке балансируемого колеса после достижения некоторой скорости вращения появляющаяся на выходе блока 16 регистрации логическая единица подготавливает цикл измерений и гашением через дешифратор 40 цифрового индикатора 41 сигнализирует о достижении требуемой скорости вращения. После достижения угловой скоростью уровня порога отпускания нулевой логический уровень на выходе регистратора (диаграмма 4) через счетный триггер 31 (диаграмма 5) разрешает счет второму счетному триггеру 32. Следующий за разрешением переход сигнала дисбаланса через нуль переводит второй счетный триггер 32 в единичное состояние (диаграмма 6), разрешая тем самым сдвиг единицы с первого разряда регистра 34. Сдвиг единицы в следующий разряд регистра осуществляется по мере прохождения дискретных уровней угла поворота шпинделя. На выходе разряда, составляющего 1/4 от полного объема регистра, логическая единица появляется в месте амплитудного значения сигнала дисбаланса положительной полярности (диаграмма 7) по соответствующей плоскости балансировки (сдвиг на 90 электрических градусов), аналогично выход с разряда регистра 34, составляющего 3/4 от его объема (сдвиг на 270 электрических градусов), соответствует прохождению сигнала дисбаланса отрицательной амплитуды (диаграмма 8).
Импульсы с выходов регистра 34 сдвига разрешают двойное интегрирование сигнала дисбаланса интеграторами 25 и 26 в интервале времени, соответствующем времени прохождения одного дискретного участка угла поворота шпинделя, причем при 90 электрических градусах, осуществляется интегрирование первым интегратором 25 прямого сигнала, а при 270 градусах инверсного. Интегрирование вторым интегратором 26 производится по выходным сигналам схемы ИЛИ (диаграмма 9). После завершения цикла интегрирования напряжение на выходе второго интегратора соответствует измеряемому по соответствующей плоскости балансировки дисбалансу.
Аналогичным образом в том же цикле измерения вторым каналом преобразования осуществляется измерение дисбаланса по другой плоскости балансировки.
При отсутствии разрешающего интегрирование сигнала осуществляется обнуление первого интегратора 25. Второй интегратор 26 обнуляется разрядом интегратора от источника 28 эталонного напряжения. Управление разрядом интегратора 26 осуществляет третий счетный триггер 33, который перебрасывается в единичное состояние при поступлении логической единицы в старший разряд регистра 34 (диаграмма 10). В этом состоянии триггер 33 через четвертый электронный ключ 30 подключает источник 28 эталонного напряжения к входу второго интегратора 26. Разряд интегратора продолжается до достижения его выходным напряжением нулевого значения, при этом на выходе второго компаратора 27 появляется уровень логического нуля, триггер 33 перебрасывается в нулевое состояние (диаграмма 11) и источник 28 эталонного напряжения отключается от входа интегратора. Время разряда оказывается пропорциональным накопленному в процессе измерения напряжению второго интегратора 26 и, следовательно, характеризует измеряемый дисбаланс по соответствующей плоскости балансировки.
Выходное напряжение на выходах интеграторов 25 и 26 в процессе измерения приведены соответственно на временных диаграммах 12 и 15.
Блок 18 отображения информации преобразует время разряда интеграторов обоих измерительных каналов в цифровое значение и отображает его на цифровом индикаторе. Преобразование осуществляется счетчками 36 и 37 импульсов, предварительно установленными в нуль сигналами со схем ИЛИ соответствующих каналов. Набранное за время разряда интегратора счетчиками число импульсов тактовой частоты с генератора 17 соответствует измеряемому дисбалансу.
После завершения цикла измерения и остановки вращения колеса информации о величине дисбаланса колеса по каждой плоскости балансировки сохраняется в счетчиках 36 и 37. Соответствующей установкой переключателя 39 информация о дисбалансе по той или иной плоскости через мультиплексор 38 и дешифратор 40 может быть выведена на индикатор 41.
Проведенное таким образом измерение дисбаланса характеризуется высокой точностью несмотря на низкую скорость вращения и нестабильность этой скорости. Действительно, измерения проводятся в угловых положениях 90 и 270 электрических градусов, где отношение полезного сигнала к сигналу погрешности от взаимовлияния плоскостей максимально;
интегрирование первым интегратором 25 сначала прямого, а затем инверсного сигнала подчеркивает полезную составляющую сигнала, в то же время сводит к нулю постоянную составляющую и составляющую, зависящую от двойного угла поворота шпинделя, являющихся источниками погрешности от взаимовлияния плоскостей балансировки;
последовательное двухкратное интегрирование исключает из выражения (6) множитель ω и тем самым в условиях непостоянства скорости вращения делает измерения независмыми от этой скорости.
После завершения измерения дисбаланса производится балансировка колеса, для чего по каждой балансировочной плоскости по результатам измерения величины дисбаланса для данной плоскости выбирается балансировочный груз, который закрепляется на ободе колеса на угловом положении, найденном с помощью блока определения места дисбаланса.
| название | год | авторы | номер документа |
|---|---|---|---|
| СКВАЖИННЫЙ ЗОНД ИЗМЕРИТЕЛЬНОГО КОМПЛЕКСА | 1992 |
|
RU2053358C1 |
| ОФТАЛЬМОЛОГИЧЕСКИЙ ХИРУРГИЧЕСКИЙ ИНСТРУМЕНТ | 1992 |
|
RU2034525C1 |
| Устройство для динамической балансировки лучом лазера роторов | 1983 |
|
SU1130753A2 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОЙ БАЛАНСИРОВКИ РЕЗОНАТОРА ТВЕРДОТЕЛЬНОГО ВОЛНОВОГО ГИРОСКОПА ЛУЧОМ ЛАЗЕРА | 1993 |
|
RU2079107C1 |
| Измерительное устройство к балансировочному станку | 1984 |
|
SU1182297A2 |
| СПОСОБ ИЗМЕРЕНИЯ ИЗНОСА РЕЖУЩЕГО ИНСТРУМЕНТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2354955C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ИЗНОСА РЕЖУЩЕГО ИНСТРУМЕНТА | 2004 |
|
RU2263300C1 |
| Измерительное устройство к балансировочному станку | 1984 |
|
SU1196709A1 |
| Измерительное устройство к балансировочному станку | 1983 |
|
SU1096511A1 |
| Устройство для динамической балансировки лучом лазера роторов | 1982 |
|
SU1043499A1 |
Использование: в балансировочной технике, стендах для балансировки. Сущность изобретения: стенд для динамической балансировки колес содержит основание, втулку, шпиндель с балансировочным колесом, связанный с втулкой, два упругих элемента. Каждый упругий элемент выполнен в виде торсиона, расположенного в вертикальной плоскости перпендикулярно оси шпинделя. Промежуточный элемент выполнен в виде двухсторонней вилки, один конец которой через один торсион связан с основанием, а другой - с втулкой через другой торсион. Датчики деформации упругих элементов выполнены в виде датчиков угловых перемещений и установлены в местах закрепления торсионов. Измерительная схема включает схему разложения дисбаланса по плоскостям балансировки, блок определения места дисбаланса, генератор тактовых импульсов и два канала преобразования. Схема разложения входами связана с датчиками угловых перемещений, а выходами - с каналами преобразования и блоком определения места. Генератор тактовых импульсов связан с блоком регистрации скорости и блоком отображения информации. Импульсный датчик связан с блоком определения места. 3 з.п. ф-лы, 5 ил.
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| Патент США N 4507964, кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
