I
Изобретение относится к системам автоматического управления промышленным транспортом и может быть использовано для управления штабелирующими кранами.
Известно фотоэлектрическое следящее устройство, сбдержашее точечный источник светового излучения и связанные с ним через оптический элемент, размешенный в месте,позиционирования, четыре одинаковьис фоточувствительных элемента расположенных в вершинах правильного четырехугольника, причем выходы всех фоточувствительных элементов соединены через преобразователи сигналов со входами логического переключателя, выходы которого соединены с приводами подвижного объекта l.
Недостатком известного устройства является сложность конструкции.
Целью изобретения является упрощейие конструкции.
Цель достигается тем, что точечный источник светового излучения расположен
в центре четырехугольника, оптический элемент выполнен в виде отражающего зеркала в форме четырехугольника с соотношением сторон 1/2, логический переключатель выполнен на восьми элементах И , четырех элементах ИЛИ и четырех инверторах, причем первый вход переключателя соединен со входами второго и шестого элементов И и входом
четвертого инвертора, второй - со входами первого и седьмого элементов И и входом второго инвертора, третий - со входами третьего и пятого элементов И и входом третьего инвертора, четвертыйсо входами четвертого и восьмого элементов И и входом первого инвертора, а выходы инверторов соединены:.первогосо входами первого, второго, пятого и шестого элементов И , второго - со
входами третьего, четвертого, пятсто и шестого элементов И , третьего - со входами первого, второго, седьмого и восьмого элементов Я , четвертого - со входами третьего, четвертого, седьмого 36 и восьмого элементов И, при этом выходы первого и второго элементов И соеди нены через первый элемент ИЛИ с первым выходом переключателя, третьего и четвертого элементов И через второй элемент ИЛИ - со вторым выходом переключателя, пятого и шестого элементов И через третий элемент ИЛИ - с третьим выходом переключателя, седьмого и восьмого элементов И через четвертый элемент ИЛИ - с четвертым выходом переключателя. На фиг. 1 изображено расположение чувствительной системы в плоскости, пер пендикулярной подвижному объекту и трае
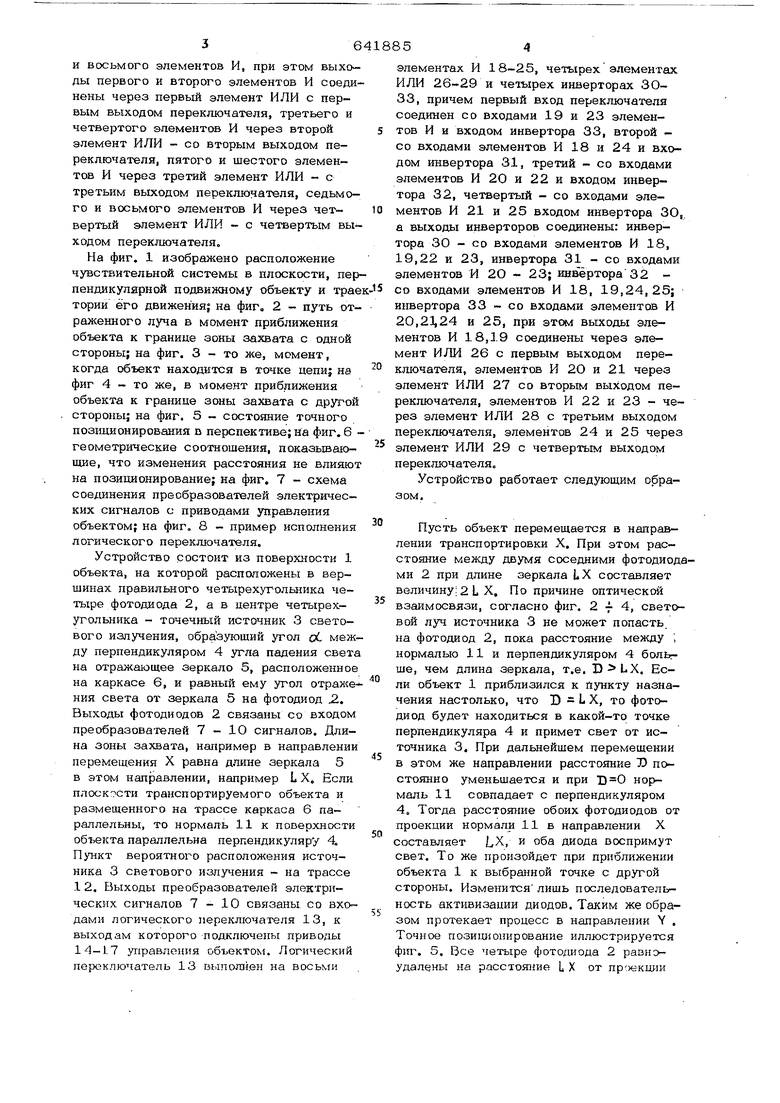
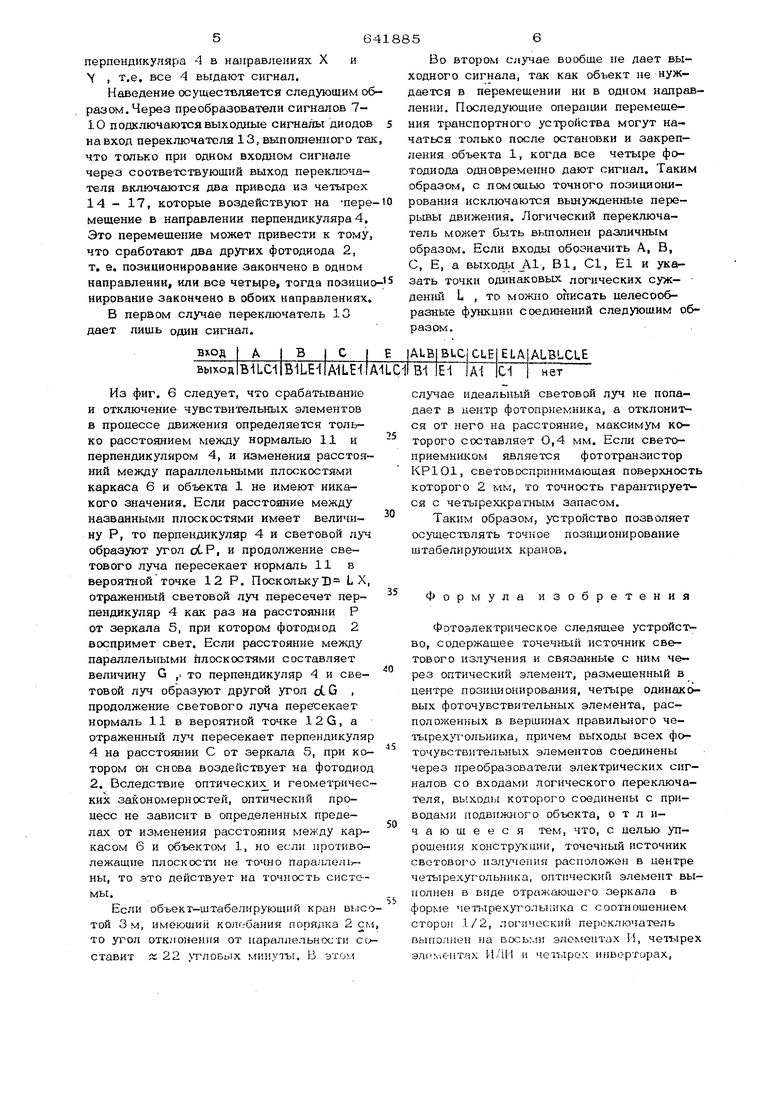
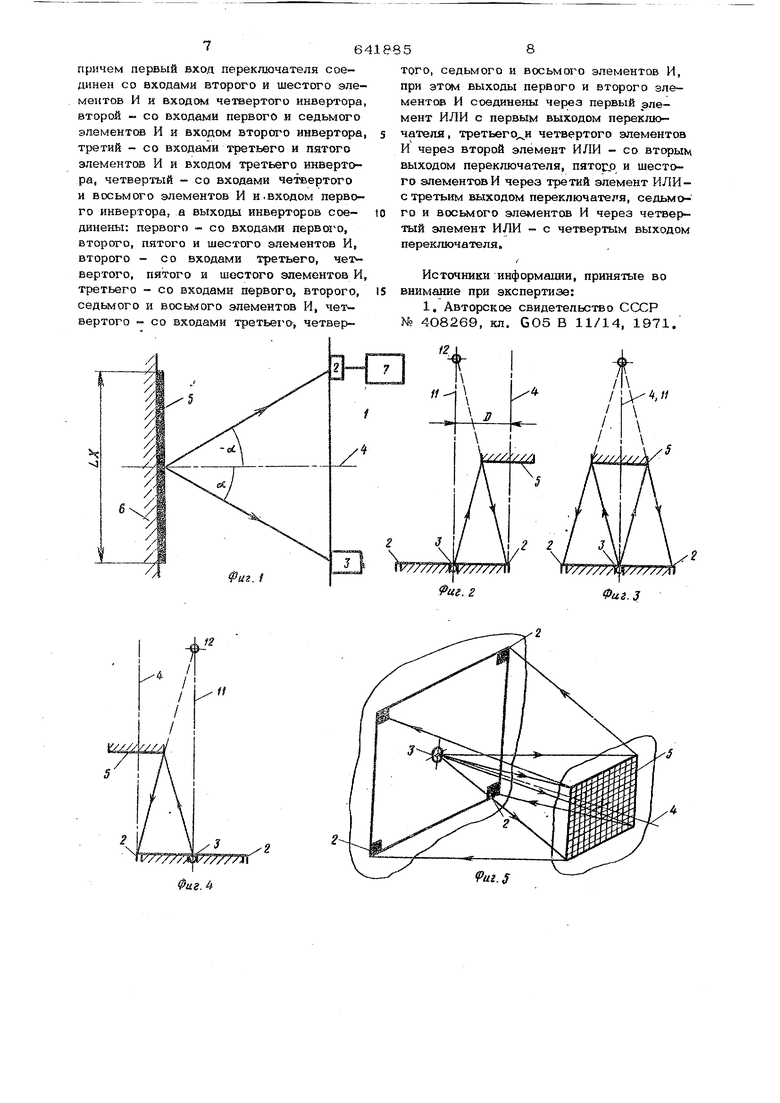
тории его движения на фиг. 2 - путь отраженного луча в момент приближения объекта к границе зоны захвата с одной стороны; на фиг. 3 - то же, момент, когда объект находится в точке цепи; на фиг 4 - то же, в момент приближения объекта к границе зоны захвата с другой стороны; на фиг. 5 -- состояние точного поз1щионироБания в перспективе; на фиг. 6 геометрические соотношения, показьшающие, что изменения расстояния не влияют на позиционирование; на фиг. 7 - схема соединения преобразователей электрических сигналов с приводами управления объектом; на фиг, 8 - пример исполнения логического переключателя.
Устройство состоит из поверхности 1 объекта, на которой расположены в вершинах правильного четырехугольника чеTbzpe фотодиода 2, а в центре четырехугольника - точечный источник 3 светового излучения, образующий угол oL между перпендикуляром 4 угла падения света на отражающее зеркало 5, расположенное на каркасе 6, и равный ему угол отражения света от зеркала 5 на фотодиод 2.. Выходы фотодиодов 2 связаны со входом преобразователей 7-10 сигналов. Длина зоны зазшата, например в направлении перемещения X равна длине зеркала 5 в этом направлении, например L X. Если плоскости транспортируемого объекта и размещенного на трассе каркаса 6 параллельны, то нормаль 11 к поверхности объекта параллельна перпендикуляру 4. Пункт вероятного расположения источника 3 светового излучения - на трассе 1 2. Выходы преобразователей электрических сигналов 7-10 связаны со вхо дами логического переключателя 13, к выходам которого подключены приводы 14-1.7 управления объектом. Логический переключатель 13 выпол11.ен на восьми
инвертора 33 - со входами элементов И 20,21,24 и 25, при этом выходы элементов И 18,19 соединены через элемент ИЛИ 26 с первым выходом переключателя, элементов И 2О и 21 через элемент ИЛИ 27 со вторым выходом переключателя, элементов И 22 и 23 - через элемент ИЛИ 28 с третьим выходом переключателя, элементов 24 и 25 через
элемент ИЛИ 29 с четвертым выходом переключателя.
Устройство работает следующим образом.
Пусть объект перемещается в направлении транспортировки X, При этом расстояние между двумя соседними фотодиодми 2 при длине зеркала LX составляет величину:2L X. По причине оптической взаимосвязи, согласно фиг. , световой луч источника 3 не может попасть, на фотодиод 2, пока расстояние меясду , нормалью 11 и перпендикуляром 4 боль ше, чем длина зеркала, т.е. D L.X. Если объект 1 приблизился к пункту назначения настолько, что D L X, то фотодиод будет находиться в какой-то точке перпендикуляра 4 и примет свет от источника 3. При дальнейшем перемещении в этом же направлении расстояние D посто1шно уменьшается и при 1)0 нормаль 11 совпадает с перпендикуляром 4, Тогда расстоя гае обоих фотодиодов от проекции нормали 11 в направлении X составляет LX, и оба диода воспримут свет. То же произойдет при приближении объекта 1 к выбранной точке с другой стороны. Изменится лишь последовательность активизации диодов. Таким же образом протекает процесс в направлении Y . Точное позиционирование иллюстрируется фиг. 5. Все четыре фотодиода 2 равноудалены на расстояние L X от пр)екции 5 элементах И 18-25, четырех элементах ИЛИ 26-29 и четырех инверторах ЗО33, причем первый вход переключателя соединен со входами 19 и 23 элементов И и входом инвертора 33, второй со входами элементов И 18 и 24 и входом инвертора 31, третий - со входами элементов И 20 н 22 к входом инвертора 32, четвертый - со входами элементов И 21 и 25 входом инвертора ЗО, а выходы инверторов соединены: инвертора 30 - со входами элементе И 18, 19,22 и 23, инвертора 31 - со входами элементов И 2О - 23; инвертора 32 со входами элементов И 18, 19,24,25;
перпендикуляра 4 в направлениях X и , т.е. все 4 выдают сигнал.
Наведение осуществляется следующим образом. Через преобразователи сигналов 710 подключаются выходные сигналы диодов 5 на вход переключателя 13, выполненного так, что только при одном входном сигнале через соответствующий выход переключателя включаются два привода из четырех 14 - 17, которые воздействуют на -пере-Ю мещение в направлении перпендикуляра 4. Это перемещение может привести к тому, что сработают два других фотодиода 2, т. е. позиционирование закончено в одном направлении, или все четыре, тогда позицио-S нирование закончено в обоих направлениях.
В первом случае переключатель 10 дает лишь один сигнал.
Во втором Случае вообще не дает выходного сигнала, так как объект не нуждается в перемещении ни в одном направлении. Последующие опера1ши перемещения транспортного устройства могут начаться только после остановки и закрепления объекта 1, когда все четыре фотодиода одновременно дают сигнал. Таким образом, с помощью точного позиционирования исключаются вынужденные перерьшы движения. Логический переключатель может быть выполнен различным образом. Если входы обозначить А, В, С, Е, а выходы А1, В1, С1, Е1 и указать точки одинаковых логических суждений L , то можно описать целесообразные функции соединений следующим образом.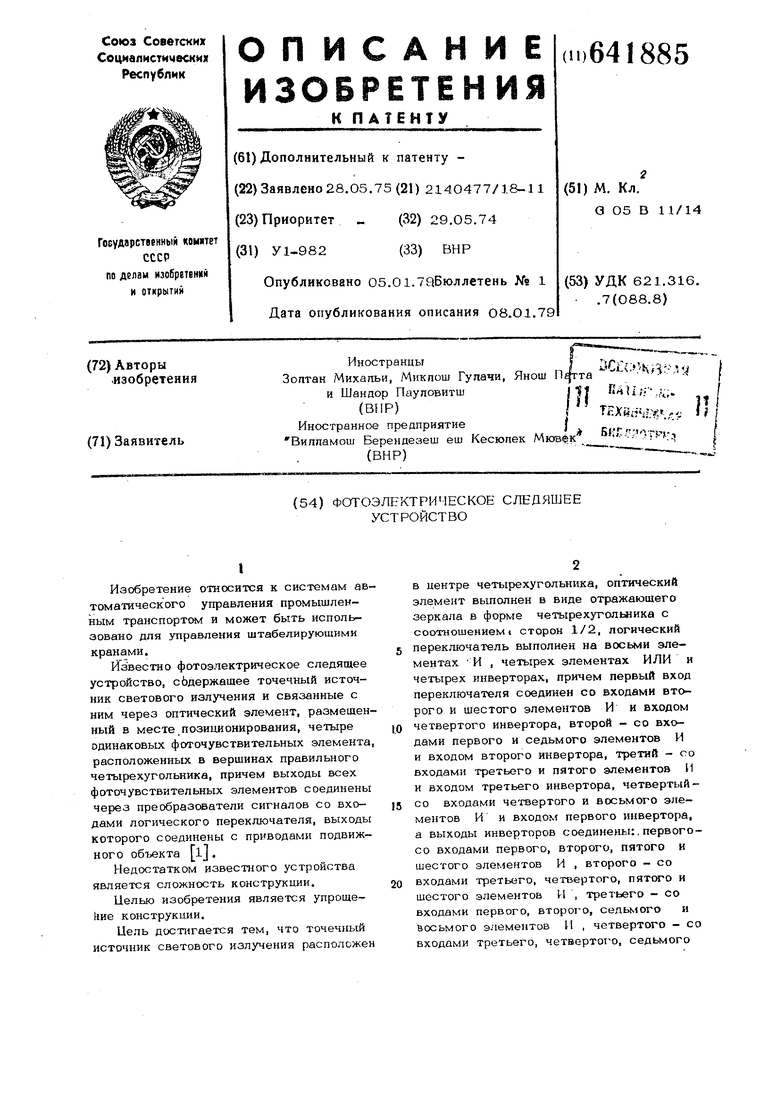
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА ПОДСВЕТА ОБЪЕКТА | 1999 |
|
RU2163353C1 |
| Устройство управления электродвигателями | 1981 |
|
SU1081621A1 |
| Оптоэлектронный преобразователь для оптического запоминающего устройства | 1983 |
|
SU1114214A1 |
| СПОСОБ ИЗМЕРЕНИЯ КООРДИНАТ ТОЧЕЧНОГО ОБЪЕКТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1985 |
|
SU1493074A1 |
| СИСТЕМА АСТРООРИЕНТАЦИИ КОСМИЧЕСКОГО АППАРАТА | 1989 |
|
SU1795708A1 |
| СХЕМА КОНТРОЛЯ | 1997 |
|
RU2153765C2 |
| УСТРОЙСТВО СИГНАЛИЗАЦИИ ОТКЛОНЕНИЯ ОТ ЗАДАННОЙ ВЫСОТЫ ЭШЕЛОНА И ЗАДАННОЙ ВЫСОТЫ ПОЛЕТА ДЛЯ ЛЕТАТЕЛЬНОГО АППАРАТА | 2009 |
|
RU2410743C1 |
| Устройство для поиска кадров микрофильма | 1983 |
|
SU1111185A1 |
| Электронная игра | 1988 |
|
SU1646563A1 |
| Устройство для управления положением исполнительных элементов | 1983 |
|
SU1226413A2 |
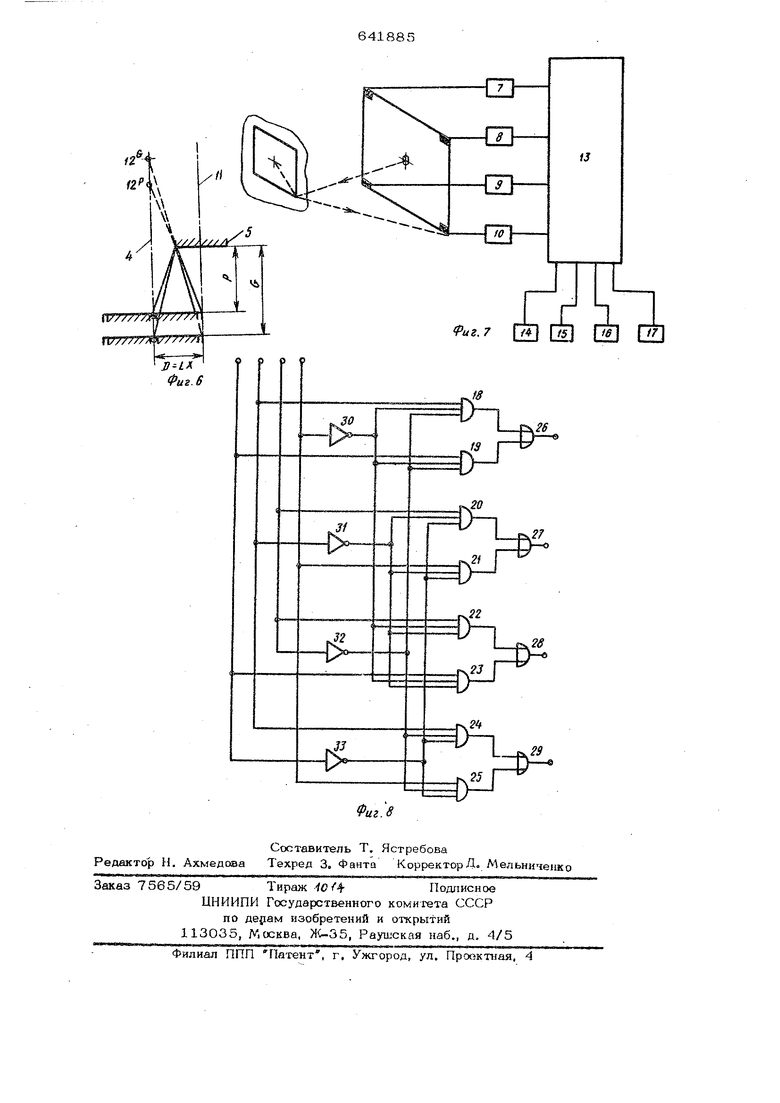
Из фиг, 6 следует, что срабатывание и отключение чувствителыш1х элементов в процессе движения определяется только расстоянием между нормалью 11 и перпендикуляром 4, и изменения расстояний между параллельными плоскостями каркаса 6 и объекта 1 не имеют никакого значения. Если расстояние между названными плоскостями имеет величину Р, то перпендикуляр 4 и световой луч образуют угол сХ-Р, и продолжение светового луча пересекает нормаль 11 в вероятной точке 12 Р. Поскольку13 L X, отраженный световой луч пересечет перпендикуляр 4 как раз на расстоянии Р от зеркала 5, при котором фотодиод 2 воспримет свет. Если расстояние между параллельными плоскостями составляет величину G ,. то перпендикуляр 4 и световой луч образуют другой угол oCG , продолжение светового луча пересекает нормаль 11 в вероятной точке 1 2 G, а отраженный луч пересекает перпендикуляр 4 на расстоянии С от зеркала 5, при котором он снова воздействует на фотодиод 2. Вследствие оптических и геометрических закономерностей, оптический процесс не зависит в определенных преде лах от изменения расстояния между каркасом 6 и объектом 1, но если противолежащие плоскости не точно napaiuienif ны, то это действует на точность системы.
ЕСЛИ объект-штабелирующий кран высотой 3 м, нмоюшин колобапия порядка 2 см то угол отклонения от параллельнсх:тп с составит 22 тлоБь1х MiiHVibi, 13 этом
случае идеальный световой луч не попадает в центр фотопрнемника, а отклонит ся от него на расстояние, максимум которого составляет 0,4 мм. Если свето- приемником является фототранзистор КР101, световоспрпиимающая поверхност которого 2 мм, то точность гарантируется с четырехкратным запасом.
Таким образом, устройство позволяет осуществлять точное позиционирование штабелирующих кранов.
Формула изобретения
Фотоэлектрическое следящее устройст во, содержащее точечный источник светового излучения и связанные с ним через оптический элемент, размещенный в центре пози1шонирования, четыре одинаковых фоточувствительных элемента, распо7шжен11ых в вершинах правильного четырехутольника, причем выходы всех фоточувствнтельных элементов соединены через преобразователи электрических сигналов со входами логического переключателя, выходы которого соединены с привода 1И подвижного объекта, отличающееся тем, что, с целью упрощения конструкции, точечный источник светового излу1е нп расположен в центре четырехугольнпка, оптический элемент выполнен в виде отражающего зеркала в меГпфехуголыпгка с соотношением сторон 1/2, логичоск1 Й пepoкv ючaтeль выпо/1иен на вось% элементах ii, чехыре элементах И,ДИ li ченлрех инверторах. причем первый вход переключателя соединен со входами второго и шестого элементов И и входом чеогаертого инвертора, второй - со входами первого и седьмого элементов И и входом вторсяго инвертора, третий - со входами третьего и пятого элементов И и входом третьего инвертора, четвертый - со входами четвертого и восьмого элементов И и.входом первого инвертора, а выходы инверторов соединены: первого - со входами nepsoi o, второго, пятого и шестого элементов И, второго - со входами третьего, че1 вертого, пятого и шестого элементов И третьего - со входами первого, второго, седьмого и BoctiMoro элементов И, четвертого - со входами третьега, четверкlIXj 2
IW 777W7777m
ФигЛ 64
ui.S 58 того, седьмого и восьмого элементов И, при этом выходы первого и второго зламентов И соединены через первый элемент ИЛИ с первым выходом переключатеяя, третьего и четвертого элементов И через второй элемент ИЛИ - со вторым выходом переключателя, пяторр и шестого элементов И через третий элемент ИЛИс третьим выходом переключателя, седьмого и восьмого элементов И через четвертый элемент ИЛИ - с четвертым выходом перекгаочателя. Источники информации, принятые во внимшше при экспертизе: 1, Авторское свидетельство СССР № 4О8269, кл. G05 В 11/14, 1971.
