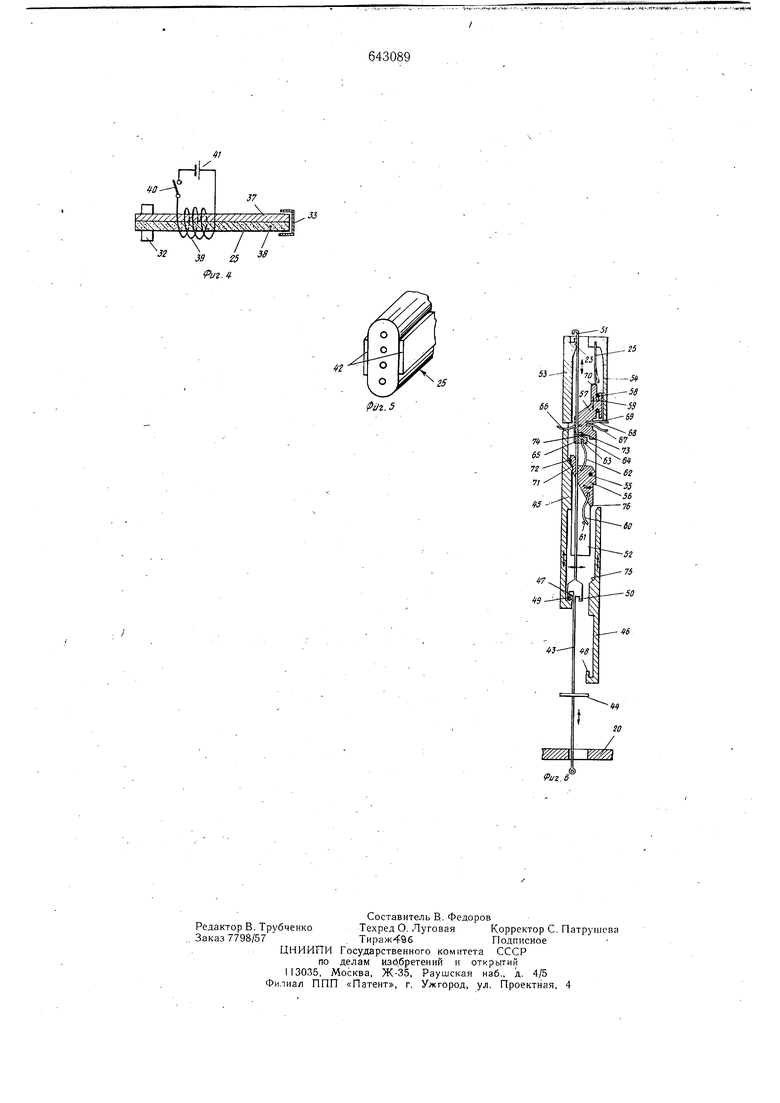
тами 17 и 18, расположенные между опорной решеткой 19 и рамной доской 20, и захватывающим элементом 21 на конце крючка, при этом захватывающий элемент, рас,положенный со стороны верхнего отогнутого конца крючка, выполнен длиннее другого захватывающего элемента 18. Устройство для отжима крючков 16 состоит иа приспособления для подбора крючков, включающего опору 22 с верхним и иижним выступами 23 и 24 и гибкие вибраторы 25 для каждого крючка и передаточный механизм, содержащий неподвижно закрепленные по всей щирине ткацкого станка рамки 26 и 27, при этом на рамке 26 установлены стержни 28, на которых смонтированы с возможностью возвратно-поступательного перемещения втулки 29, связанные одновременно каждая с плоской пружиной 30 и крючком 16. Пружина 30 установлена одним концом с возможностью поворота на опорной рещетке 19, а другим входит в отверетие 31 опоры 22. Один конец 32 вибратора 25 установлен в опоре 22 неподвижно, а другой конец 33 с возможностью отклонения над отверстием 31 в опоре 22, куда входит один конец пружины 30. Опорная решетка может перемещаться вверх и вниз. Взаимодеиствне ножей , 14 и 15с захватывающими элементами 17 и 18 осуществляется посредством уступов 34 и 35, размещенных соответственно на ножах 14 и 15. Лица 7,, а вместе с ними и крючки 16 стремятся занять крайнее нижнее положение при помощи пружины 36 и натяжения основных нитей 3. Вибратор 25 может быть выполнен в виде магнитострикционного элемента, состоящего из двух полос 37 и 38 с разной степенью удлинения при образовании вокруг магнитного поля которое может создаваться катущкои 39, присоединенной через выключатель 40 к источнику 41 питания или к соответствующей части устройства программного управления. Вибратор 25.может также быть выполнен в виде электрострикционного (пьезоэлектрического) элемента, содержащего две полосы с разной степенью удлинения при подаче напряжения на два электрода 42. Вследствие разного Чдлинёния полос вибратор приводится в изогнутое . положение. Подъемный механизм двухподъемной жаккардовой машпнь работает следующим образом. Во время работы станка ножи 14 и 15 перемещаются возвратно-поступательно в вертикальной плоскости в противоположных направлениях один относительно другого. Вибраторы 25 управляются датчиками переплетения, при этом одни концы 33 вибратора 25 закрывают отверстия 31 в опоре 22, а другие - открывают. Опорная решетка 19 начинает перемещаться вверх в то время, когда ножи 14 и 15 подходят к своим крайни.м положе(П1ям. Вибраторы 25 ощупываются концами плоских пружин 30, находящимися в отверстиях 31 опоры 22. Если вибратор перекрывает отверстие 31, то плоская пружина 30 изгибается и через смещающуюся втулку 29 переводит крючок 16 в крайнее правое положение, а если отверстие 31 свободно, то пружина 30 концом входит в него дальще, и крючок 16 остается в крайнем левом положении. Перемещение крючка 16 из крайнего правого положения осуществляется пружиной 36 и ножом 15, взаимодействующим с захватывающим элементом 18 крючка 16, а при последующем выпрямлении пружины 30 крючок переводится внизу в крайнее левое положение, при этом захватывающей элемент 21 крючка 16 вход. g зацепление с выступом 24 опоры 22. Захватывающий элемент 17 выполнен длиндее элемента 18 для того, чтобы крючок 16, находящийся вверху в крайнем левом -положении, при прогнутой пружине 30 мог быть выведен из зацепления с выступом 23 .,„60 движущимися вверх ножом 14, либо jg g затем переведен в нижнее положение. Если расцепление произведено ножом 14, то элемент 17 и выстун 34 сцеп. незадолго до прогиба пружины 30, нри котором пружина 30, элемент 17 и выступ 34 должны оставаться в зацеплении друг с другом,что обеспечивается больигей длиной захватывающего элемента 17. Если расцепление захватывающего элемента 21 крючка 16 и выступа 23 осуществлено посредством ножа 15, то необходимо расположить захватывающий элемент 18 и выступ 35 ножа 15 один над другим во вре прогибания пружины 30 и ввести их в зацепление друг с другом при дальнейн1ем ножа 15, чтодостигается меньн1ей . элемента 18. Так как места сцепления захватывающего элемента 21 с выступами 23 и 24 опоры 22 находятся выше зоны отжима крючков 16 втулкой 29, то происходит больпюй ход в сторону захватывающих элементов 17 и 18, величину которого можно варьировать соответствующим выбором отношения расстояния от выступов 23 и 24 до втулки 29 к расстоянию от величины хода втулки 29 к перемещению захватывающих элементов 17 и 18. В варианте исполнения подъе.много мсханизма двухподъемной жаккардовой маппи1ы с открытым зевом крючок 43 имеет на нижний части стопорную щайбу 44, которая предназначена для того, чтобы крючок при освобождении его ножами 45 и 46 не упал под действием пружины .36 сквозь отверстие рамной доски 20. Кроме того, у ножей 45 и 46 выступы 47 и 48 предусмотрены на нижнем конце. Крючок 43 имеет отогнутые вниз захватывающие элементь 49 и 50, а на конце крючка вверху расположен захватывающий
элемент 51, при этом захватывающий элемент 49, расположенный со стороны верхнего отогнутого конца крючка, выполнен длиннее другого захватывающего элемента 50. .
На кронштейне 52 установлены опоры 53 и 54, а на последней закреплен гибкий вибратор 25. На кронштейне 52 шарнирно установлены на оси 55 рычаг 56 и щуп 57, неремещаемый вверх и вниз при помощи щтифтов 58, расположенных , в пазах 59. На новоротном рычаге 56 закреплена плоская нружипа 60, которая опирается в палец 61. Пружина 60 стремится повернуть рычаг 56 нротив хода часовой стрелки. Кроме того, на рычаге 56 закреплена пружина 62, верхний конец 63 которой соединен с направляющим элементом 64. В направляющем пазу 65 элемента 64 перемещается крючок 43. Пружина 62 стремится переместить элементы 64 и крючок 43 вправо.
На щупе 57 закреплены.плоские пружины 66-68. При воздействии на них ножей 45 и 46 пружины 66 и 67 стремятся переместить щуп 57 вверх. Пружина 68 стремится переместить щуп 57 вниз, прижимаясь к поверхности 69 опоры 54. Пружины 66 и 67 рассчитаны так, что при воздействии на них ножей 45 и 46 могут преодолевать силу пружины 68.
Щуп 57, имеет плон;адку 70 для контактирования с вибратором 25, поворотный рычаг , 56 - наклонную поверхность 71 для контактирования с наклонной поверхностью 72 ножа 45. Направляющий элемент 64 имеет поверхность 73 для контактирования с поверхностью 74 щупа 57. Контакт поверхности 75 ножа 46 осуществляется по поверхности 76 рычага 56.
Работа подъемного механизма такой конструкции осуществляется следующим образом.
Во время хода ножа 45 вверх и одновременного хода ножа 46 вниз гибкий .вибратор 25 управляется сигнальным датчиком и находится при этом в прямолинейной плоскости. При подходе ножа 45 к верхнему положению его верхний конец давит на пружину 66, вследствие чего щуп 57 переводится в крайнее правое положение, в котором от контактной площадки 70 упирается в изгибаемый вибратор 25, после чего щуп 57 должен оставаться в нижнем положении. На самом верхнем участке хода ножа 45 вве-рх его наклонная поверхность 72 прижимается к наклонной поверхности 71 новоротного рычага 56, вследствие чего последний поворачивается по ходу часовой стрелки. Однако направляющий элемент 64
и крючок 43 остаются слева, поскольку направляющий элемент 64 упирается поверхностью 73 в поверхность 74 щупа 57, нож 45 находится в верхнем положении, и.захватывающий элемент 51 крючка 43 немного поднят за пределы выступа 23. При последующем ходе ножа 45 и ходе ножа 46 вверх рычаг 56 поворачивается сначала против хода часовой стрелки. Захватываюпи1Й элемент 51 крючка 43 и выступ 23 входят в зацепление один с другим. Гибкий вибратор 25 вновь получает сигнал с датчика и изгибается. Верхний конец ножа 46 прижимается к пружине 67, вследствие чего щуп 57 перемещается вверх.
В результате этого поверхность 74 занимает положение вьпие поверхности 73. При последующем прижатии наклонной поверхности 75 ножа 46 к поверхности 76 рычага 56 последний поворачивается по ходу часовой стрелки. Вследствие этого направляющий элемент 64 и средняя и нижняя
части крючка 43 перемещаются вправо, причем еще сохраняется зацепление захватывающего элемента 51 крючка с выступом 23. Далее выступ 48 входит в зацепление сзахватывающим элементом 50, вследствие чего элемент 51 крючка 43 и выступ 23 выводятся из зацепления и крючок 43 перемещается верхней частью в крайнее правое положение., .
При последующем движении ножа 46
вниз крючок 43 перемещается вниз.
Формула изобретения
Подъемный механизм двухподъемной жаккардовой мащины с открытым зевом, содержащий опору и установленные с возможностью возвратно-поступательного перемещения ножи и расположенные вертикально крючки, имеющие захватывающие элементы для взаимодействия с ножами, отличающийся тем, что, с целью упрощения конструкции, верхний конец каждого крючка и его захватывающие элементы отогнуты вниз и расположены в плоскости, перпендикулярной плоскости соответствующего ножа, при
этом захватывающий элемент, расположенный со стороны верхнего отогнутого конца крючка, выполнен длиннее другого захватывающего элемента, а опора имеет, по меньшей мере, один выступ для взаимодействия с верхним отогнутым концом крючка.
Источники информации, принятые во внимание при экспертизе
1. Патент США Jxfo 2438796, кл. 139-72, 1948.
.2
fu2.3
39 25 Ри-гЛ
25
51 -
Фаг.5
66
67
| название | год | авторы | номер документа |
|---|---|---|---|
| Двухподъемная жаккардовая машина открытого зева | 1979 |
|
SU1025333A3 |
| Двухподъемная жаккардовая машина открытого зева | 1979 |
|
SU1103801A3 |
| Двухподъемная жаккардовая машина открытого зева для ткацкого станка | 1981 |
|
SU1071229A3 |
| Зевообразовательный механизм двухподъемной жаккардовой машины для открытого зева ткацкого станка | 1976 |
|
SU657759A3 |
| Машина для изготовления ворсовых тканей, наподобие ковров | 1959 |
|
SU128278A1 |
| Двухподъемная жаккардовая машина открытото зева для ткацкого станка | 1982 |
|
SU1083916A3 |
| Направляющее устройство для крючков двухподъемной жаккардовой машины | 1976 |
|
SU710525A3 |
| Устройство для изготовления проволочных пучков | 1975 |
|
SU551098A1 |
| Двухподъемная жаккардовая машина открытого зева | 1984 |
|
SU1230471A3 |
| ПОЛУАВТОМАТ ДЛЯ ПРОДАЖИ БИЛЕТОВ ИЗ РУЛОНАD.ATEirUlO- ТЕХ1№ЧЕа*Л8Бик'-цотп:^ | 1965 |
|
SU167691A1 |

gg
