(54) ИЗМЕРИТЕЛЬНОЕ СТЕРЕОТЕЛЕВИЗИОННОЕ УСТРОЙСТВО

,.
Изобретение относигся к радиотехнике н может использоваться для получе-i ния координат точек поверхности путем обработки визуальной информации о BHOID- ней среде.
Известно стереотелевизионное устройство, содержащее две телевизионные пб реДающие камеры, блок управления, пер вый и второй выходы которого подключены соответственно к входу первой и второй гелевизионных передающих камер, а третий вЬ1ход блока управления подсоединен к первому входу блока запоминания l
Однако в таком устройстве сравнение фявого и левого сигналов одного и тоfo же объекта гфоисходит в основном по ях ниакочасготным состав;ляющим, поэтому существует диапазон задержек, is котором сигналы от одного и того же объекта перекрываются, что влечет за собой неудовяетворитбяьную точность измерения.
Цель изобретения - повышение точности, измерения.
Для этого в измерительное стереОтелевизйоннОе устпойство, содержащее две телевизионные передающие камеры, блок управления, первый и второй выходы которого подключены соответственно к входу первой и второй телевизионных передающих камер, а третий выход .блока управления подсоединён к первому входу блока запоминания, введены первый и второй фильтры верхних частот и последовательно соединенные коррелятор и пороговый блок, выход которого подсоединен к второму входу блока запоминания, при этом выходы первой и второй телевизионных передающих камер тюдсоединеиы соответственно к первому и второму входам кс эрелятора через соответствующие первый и второй фильтры верхних частот.
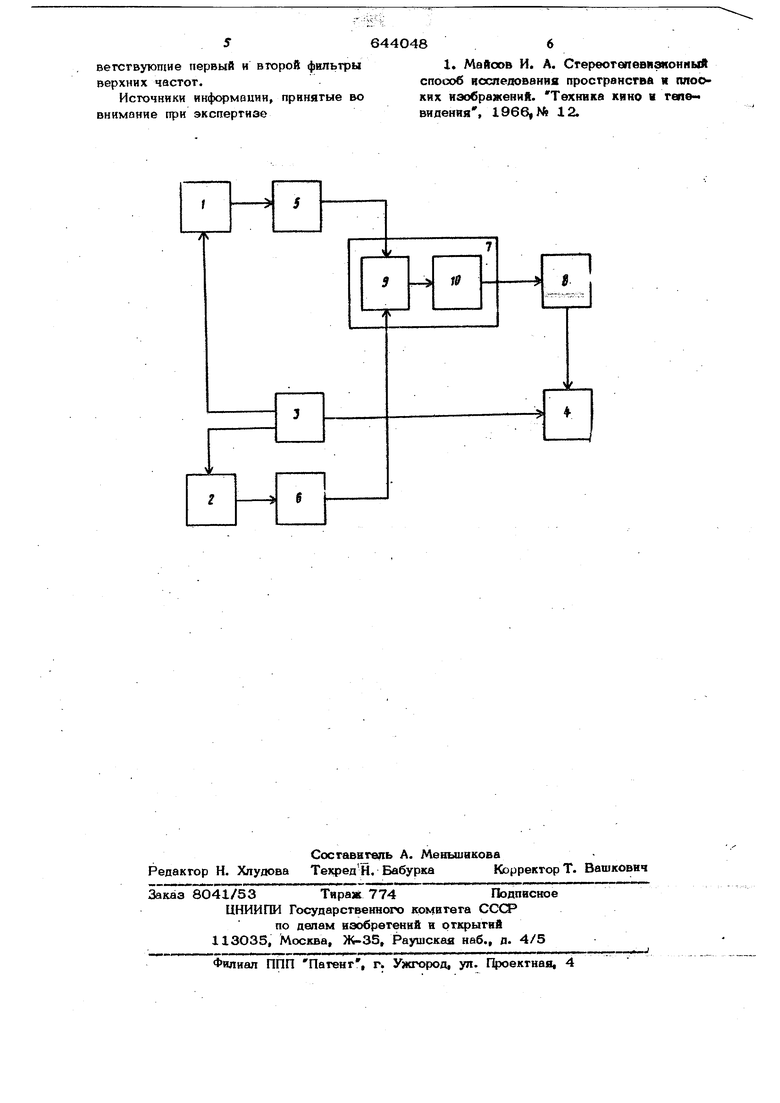
На чертеже приведена структурная электрическая схема предлагаемого yci . ройства.
Измерительное стереотелевизионное устройство содержит две телевизионные передающие камеры 1 и 2, блок 3 управлевая блок 4 запоминания, фильтры 5 и 6 верхних частот, коррелятор 7, пороговый блок 8, Устройство работает следующим образом. Две телевизионные передающие камеры 1 и 2, неподвижные по отношению X другу, являются датчиками стереопары изображений объекта. Оптические оси телевизионных передающих камер 1 и 2 направлены параллельно (нулевая конвергенция) и имеют фиксированное базисное смещение. Направление строчной развертки совпадает с линией пересечения плоскости изображения с плоскостью визирования т.е. с линией наблюдаемых параллаксов. Блок управлениа: 3 осуществляет программное управление строчной и кадровой развертками телевизионных передающих камер 1 и 2 и формирует адрес ячейки блока запоминания 4. Программное управление заключается в том, что начало правой строчной развертки задерживается относительно левой на величину Т , прини мающую ряд последовательных значений от О .Видеосигналы правой и левой телевизионных передающих камер 1 и 2 поступают через фильтры 5 и 6 верхних .частот на коррелятор 7, который Может быть вы WOJtHen на основе аналогового умножителя 9 и фильтра 10 нижних частот. Выхо ной сигнал коррелятора 7 поступает через пороговый блок 8 на блок запоминания 4, в качестве которого используется память ЭВМ. Предполагается, что за время сбора информации со всей области обзора не происходит взаимного перемещения объекта и телевизионных передающих камер. За это время блок управления 3 производит последовательный перебор ячеек блока запоминания 4, одновременно сканируя изображение и образуя дискретное множество, точек области обзора. Исходными данными для расчета координат являются; номер стро ки растра (одинаковый для правого и левогЬ растра), положение левого (или правого) электронного луча на строке в каждый момент времени и задержка правой развертки относительно левой (или наоборот). Сигнал о наличии в данной точке йрбсгранства элёмента поверхности пост пает от коррелятора 7 через пороговый блок 8. Этот сигнал может принимать только два значения: нбль, если сигнал не превышает порога, и единицу, если 6 84 превьпиает. Таким образом, результат полного обзора будет представлять собой трехмерный булевский массив. Нал чие фильтров 5 и 6 верхних чаотот в каналах видеосигнала устраняет влияние низкочастотных составляющих изображения, снижающих точность измерения. Значение задержки Т однозначно связано с дальностью до исследуемой в данный момент области. Эта область представляет собой пространство вблизи плоскости перпендикулярной оптическим осям, в пределах допустимой погрешности по дальности. Объекты, попавшие в это странство, должны дать правый и левый сигналы, от которых в результате получится превышение порога корреляции. Правый и левый сигналы от объектов, не попрвших в это пространство или от разных объектов не должны коррелировап, если принять во внимание статистические свойства телевизионных сигналов. Значе-. ния задержки Т могут быть выбраны с учетом погрешности измерения, зависящей от дальности. . Исполнение коррелятора 7 в виде аналогового умножителя 9 и фильтра нижних частот Ю позволяет получать результат измфения непрерывно в режиме реального времени. Предлагаемое устройство может быть использовано в системе управления движением интегральных роботов, таких как транспортные роботы или автономные подвижные системы исследования планет, где исключена возможность непосредственного управления человеком. ормула изобретени Измерительное стереотелевизионное устройство, содержащее две телевизионные передающие камеры, блок управления, первый и второй выходы которого подключены соответственно к входу и второй телевизионных передающих камер, а третий выход блока управления подсоединен к первому входу блока запоминания, отличающееся тем, что, с. целью повышения точности измерения, введены первый и второй фильтры верхних частот и. последовательно соединенные коррелятор и пороговый блок, выход которого подсо- епинен к второму входу блока запоминания, при этом выходы первой и второй телевизионных передающих камер подсоединены соответственно к первому и второму входам коррелятора через сооту644048вегсгвуюшие первый и второй фильтры
верхних частот.
Источники информации, принятые во внимание при экспертиае
способ цоспедоввния пространсгва tt плоо ких изображений. Техника кино в гепв- видения, 1966, М« 12. 6 1. Майсов И. А. Сгереотелевязконнь
