Изобретение относятся к области радиотехники и может быть использовано в устройствах, требующих отображения трехмерной информации, например в радиолокационных станциях, в диспетчерских пунктах управления воздушным движением в районах аэропортов.
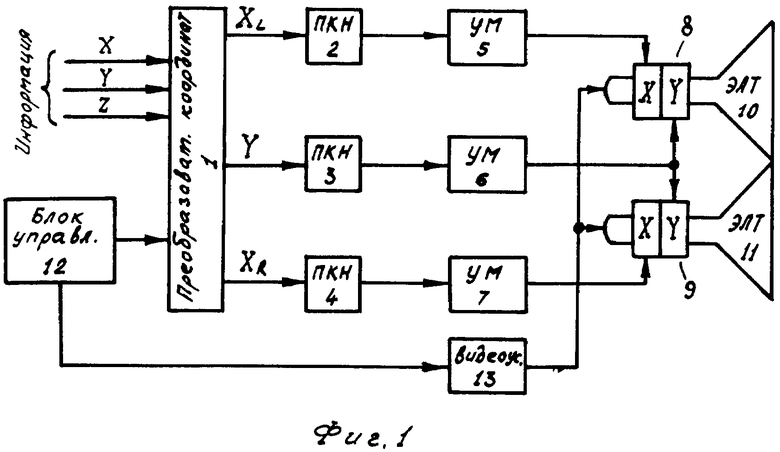
Известны стереоскопические индикаторы, используемые в телевизионных устройствах (см., например, Шмаков П.В., Колин К.Г., Джакония В.Е. Стереотелевидение. М., "Связь", 1968). Как правило, стереотелевизионные индикаторы формируют стереоскопическое изображение с помощью двух телевизионных изображений (левого и правого), содержащих информацию о параллаксе, и передаваемых от двух телекамер. Такие индикаторы содержат усилители мощности X и Y, составляющих изображений (строчные и кадровые выходные каскады), информация о параллаксе формируется за счет пространственного разнесения передающих камер и заложена в видеосигналах изображений, поступающий через два раздельных видеоусилителя на управляющие электроды ЭЛТ. Стереотелевизионные индикаторы отображают реальные трехмерные объекты и не позволяют синтезировать стереоизображение. Известны также стереотелевизионные индикаторы, используемые в устройствах отображения машинных решений (см., например, Катыс Г.П. Объемное и квазиобъемное представление информации. М.: "Энергия", 1975), содержащие выходные каскады X и Y составляющих левого и правого изображений, один или два видеоусилителя, выходные сигналы которых управляют токами лучей обеих ЭЛТ. Хотя информация, отображаемая стереоиндикаторами, поступает от ЦВМ, но синтез стереоизображения осуществляется аналоговыми методами, что требует очень сложной аппаратуры, в то же время отображаемый синтезированный стереообъект не модулируется по яркости, как в случае с телекамерами, т.к. аналоговые напряжения, поступающие в описанное устройство, пропорциональны координатам отображаемого объекта, а не его яркости. Наиболее близким к заявляемому стереоиндикатору является устройство синтеза стереоизображения с помощью ЦВМ (см. A. Michael Noll. Stereographic projections by digital computer. "Computer and Automation", May, 1965), которое выбрано прототипом. В этом устройстве синтез стереоизображения осуществляет ЦВМ, затем полученные коды преобразуются в аналоговые напряжения, которые усиливаются усилителями мощности, а затем поступают на ЭЛТ. Схему прототипа можно представить следующим образом (фиг.1). Преобразователь координат 1 осуществляет преобразование кодов декартовых координат X, Y, Z отображаемой информации, поступающей, например, из ЦВМ в коды стереоскопических координат XL, XR, Y, где XL и XR координата X для левого и правого изображений соответственно. В прототипе преобразование декартовых координат в стереоскопические осуществляет ЦВМ. Коды стереоскопических координат преобразуют преобразователями кодов в напряжения (ПКН) 2, 3, 4 в аналоговые напряжения, которые усиливаются усилителями мощности (УМ) 5, 6, 7. Усилители мощности нагружены на отклоняющие катушки 8, 9, которые отклоняют электронные лучи ЭЛТ 10 и 11 в соответствующие точки экранов. Блок управления 12 формирует импульсы управления для преобразователя координат и импульсы подсвета, которые усиливаются видеоусилителем 13 и управляют токами лучей обеих ЭЛТ. Осуществив известными методами сепарацию изображений для левого и правого глаз, можно наблюдать стереоскопическое синтезированное изображение. Такой стереоиндикатор можно применить для радиолокационных станций, в которых осуществляется цифровая обработка радиолокационного сигнала. Как правило, информация о целях в РЛС представлены в сферических координатах, поэтому наиболее полную аналогию работы РЛС можно представить на экране стереоиндикатора с помощью радиально-сферической развертки. Формирование радиуса дальности на экране стереоиндикатора цифровыми методами требует аппроксимации этого процесса, что влечет за собой понижение точности отображения радиолокационной информации. Пересчет кодов сферических координат в стереоскопические каждого элемента дальности с требуемой в современных РЛС разрешающей способностью по дальности потребует очень быстродействующего и сложного преобразователя координат.
В сложной помеховой обстановке тренированный оператор с помощью индикатора первичной информации с яркостной отметкой и послесвечением, обнаруживает цель с большей вероятностью, чем устройство цифровой обработки. При цифровом синтезе стереоизображения создание стереоиндикатора с радиально-сферической разверткой и яркостной отметкой цели не представляется возможным. Эти недостатки присущи приведенным аналогам и прототипу, кроме того, ни аналоги, ни прототип не позволяют осуществить пространственную фильтрацию изображения случайных помех.
Желательно иметь стереоскопический радиолокационный индикатор первичной информации с повышенной точностью отображения радиолокационной информации и повышенной вероятностью обнаружения радиолокационных целей на фоне помех с цифровым синтезом радиально-сферической развертки по кодам положения антенны при аналоговом формирований радиуса дальности и яркостной отметкой цели. Желательно, чтобы этот индикатор осуществлял пространственную фильтрацию изображения случайных помех.
Эти цели достигаются тем, что в стереоскопический радиолокационный индикатор первичной информации, содержащий блок управления, первый выход которого соединен с управляющим входом преобразователя сферических координат в стереоскопические, выходы кодов координат начала вектора дальности YO, левой XOL и правой XOR, стереопары которого соединены со входами преобразователей кодов в напряжения, выходы которых соединены с первыми входами суммирующих усилителей мощности, две ЭЛТ с отклоняющими катушками и видеоусилитель, выход которого соединен со входами обеих ЭЛТ, введены преобразователи кодов угла места α и азимута φ в коды синуса и косинуса соответствующих углов, выходы преобразователей кодов углов соответственно соединены с четырьмя информационными входами преобразователя сферических координат в стереоскопические, пятый информационный вход которого соединен с выходом кода размера развертки дальности блока масштабирования, вход которого соединен со вторым выходом блока управления, третий выход которого соединен с управляющим входам генератора пилообразного напряжения, выход которого соединен с аналоговыми входами у цифроаналоговых умножителей, цифровые входы которых соединены с выходами кодов координат конца вектора дальности Yρ, левой XρL и правой XρR стереопары преобразователя координат, выходы цифроаналоговых умножителей соединены с вторыми входами соответствующих суммирующих усилителей мощности, выходы которых соединены с информационными входами соответствующих коммутаторов сигналов, причем выход усилителя мощности Y сигнала соединен с информационными входами коммутаторов сигналов YL, и YR, управляющие входы коммутаторов сигналов XL и YL соединены с четвертым выходом блока управления, пятый выход которого соединен с управляющими входами двух других коммутаторов сигналов, выходы коммутаторов сигналов соединены с соответствующими отклоняющими катушками двух ЭЛТ.
Введение блоков, формирующих радиально-сферическую развертку, и блоков, поочередно коммутирующих левое и правое изображения, подключенных указанным образом, позволяет цифровым методом определять координаты начала и конца радиуса-вектора дальности, сам радиус-вектор формировать аналоговым методом, отображать радиолокационную цель яркостной отметкой и осуществлять пространственную фильтрацию изображения случайных помех за счет того, что случайные помехи, в отличие от цели, не создают стереопару при последовательном формировании левого и правого изображений и поэтому отображаются в плоскости экрана. Все это повышает точность отображения радиолокационной информации и вероятность обнаружения радиолокационных целей на фоне помех, а также обеспечивает наглядность и полную аналогию изображения работе РЛС при сравнительной простоте устройства.
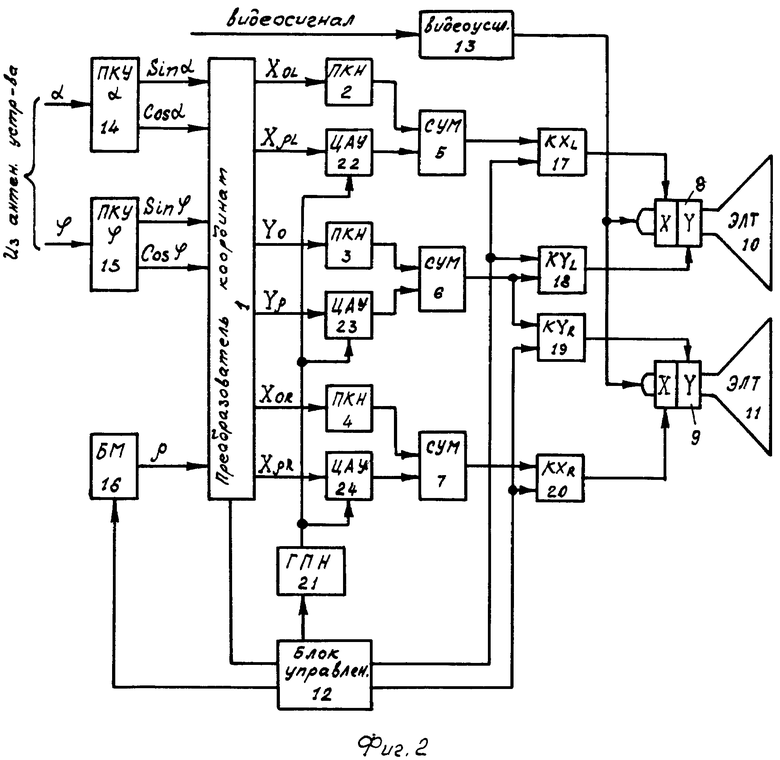
На фиг.1 показана схема стереоскопического индикатора прототипа. На фиг.2 представлена схема стереоскопического радиолокационного индикатора первичной информации.
Стереоскопический радиолокационный индикатор первичной информации (фиг.2) имеет блок управления 12, первый выход которого соединен с управляющим входом преобразователя сферических координат в стереоскопические 1, выходы кодов координат начала вектора дальности YO, левой YOL и правой XOR, стереопары которого соединены со входами преобразователей кодов в напряжения (ПКН) 2, 3, 4, выходы которых соединены с первыми входами суммирующих усилителей мощности (СУМ) 5, 6, 7, две ЭЛТ 10, 11 с отклоняющими катушками 8, 9 и видеоусилитель 13, выход которого соединен со входами обеих ЭЛТ. Выходы преобразователей кодов угла места α (ПКУ - α) 14 и азимута φ (ПКУ - φ) 15 в коды синуса и косинуса, соответствующих углов, соответственно соединены с четырьмя информационными входами преобразователя координат 1, пятый информационный вход которого соединен с выходом кода размера развертки дальности блока масштабирования (БМ) 16, вход которого соединен со вторым выходом блока управления 12, третий выход которого соединен с управляющим входом генератора пилообразного напряжения (ГПН) 21. Выход ГПН соединен с аналоговыми входами цифроаналоговых умножителей (ЦАУ) 22, 23, 24, цифровые входы которых соединены с выходами кодов координат конца вектора дальности Yρ, левой XρL и правой XρR стереопары преобразователя координат 1. Выходы ЦАУ 22, 23, 24 соответственно соединены со вторыми входами СУМ 5, 6, 7, выходы которых соединены с информационными входами соответствующих коммутаторов сигналов 17, 18, 19, 20. Выход усилителя мощности Y сигнала 6 соединен с информационными входами коммутаторов сигналов 18, 19. Управляющие входы коммутаторов 17, 18 соединены с четвертым выходом блока управления, пятый выход которого соединен с управляющими входами коммутаторов сигналов 19, 20. Выходы коммутаторов сигналов 17, 18, 19, 20 соответственно соединены с отклоняющими катушками 8, 9 электронно-лучевых трубок 10, 11 соответственно.
Стереоскопический радиолокационный индикатор первичной информации работает следующим образом. Из антенного устройства на вход преобразователей кодов угла места (ПКУ - α) 14 и азимута (ПКУ - φ) 15 поступают коды соответствующих углов. ПКУ осуществляет преобразование кодов углов в коды синусов и косинусов этих углов. Кода синусов и косинусов поступают на четыре соответствующих информационных входа преобразователя сферических координат в стереоскопические 1, на пятый информационный вход которого подается код размера развертки дальности, который формируется блоком масштабирования (БМ) 16. Этот код определяется максимальной дальностью РЛС и размерами экрана ЭЛТ. Преобразователь координат 1 осуществляется преобразование кодов сферических координат в коды стереоскопических координат, причем не всех промежуточных значений вектора дальности, а только коды координат начала и конца данного вектора. Коды координат начала вектора дальности YO, левой XOL и правой XOR стереопары преобразуются преобразователями кодов в напряжения (ПКН) 2, 3, 4 в аналоговые напряжения, которые усиливаются суммирующими усилителями мощности (СУМ) 5, 6, 7, соответственно, затем через коммутаторы сигналов (KXL, KYL, KYR, KXR) 17, 18, 19, 20 поступают на отклоняющие катушки 8, 9, которые отклоняют электронные лучи ЭЛТ 10, 11 в точки экранов, соответствующие координатам начала левого и правого изображений вектора дальности. Импульс начала развертки, формируемый блоком управления 12, запускает генератор пилообразного напряжения (ГПН) 21, который вырабатывает пилообразное напряжение, поступающее на аналоговые входы цифроаналоговых умножителей (ЦАУ) 22, 23, 24, на цифровые входы которых подаются коды координат конца вектора дальности Yρ, левой XρL и правой XρR стереопары из преобразователя координат 1. На выходах ЦАУ формируются пилообразные напряжения с амплитудами, пропорциональными цифровым кодам. С выходов ЦАУ пилообразные напряжения поступают на вторые входы соответствующих суммирующих усилителей мощности, где суммируются с соответствующими постоянными напряжениями, усиливаются и через коммутаторы сигналов 17, 18, 19, 20 поступают на отклоняющие катушки 8, 9. Таким образом, электронные лучи ЭЛТ 10 и 11 прочерчивают "втемную" левую и правую проекции стереоскопического изображения вектора дальности. Если на данном векторе дальности находится цель, то с приемника РЛС на вход видеоусилителя 13 приходит видеосигнал с соответствующими амплитудой и длительностью, который усиливается и отпирает в соответствующий момент ЭЛТ 10 и 11. В результате этого в соответствующих точках левой и правой проекций вектора дальности появляются яркостные отметки цели. Осуществив известными методами сепарацию левого и правого изображений, получают стереоскопические изображения яркостной отметки радиолокационной цели.
В случае сложной помеховой обстановки, когда цель трудноразличима на фоне случайных помех коммутаторы сигналов 17, 18 и 19, 20 по сигналам блока управления 12 поочередно выключают то левое, то правое изображение синхронно с разверткой дальности. Как правило, за время обзора цели РЛС излучает несколько зондирующих импульсов, т.е. от цели РЛС принимает более двух отраженных сигналов. Так как координаты цели за время посылок двух зондирующих импульсов изменяются незначительно, то яркостные отметки цели на экранах ЭЛТ 10 и 11, сформированные последовательно во времени двумя векторами дальности, создают стереопару. Помехи, имеющие случайные, непостоянные параметры от посылки к посылке, т.е. в соседних развертках (одна из которых формирует левое, а вторая правое изображения) имеют различную дальность, и, следовательно, различные X и Y координаты. Если разница координат X левого и правого изображений определяет параллактический сдвиг, то значительная разница координат Y исключает возможность стереоскопического восприятия левого и правого изображений и они наблюдаются как два плоских изображения. Вследствие этого оператор будет наблюдать изображение цели в трехмерном пространстве (перед экраном), а изображение помех - в плоскости экрана. Таким образом, в этом стереоиндикаторе осуществляется пространственная фильтрация изображения помех. Последние как бы отсеиваются в плоскость экрана, не загромождая отображаемый объем.
В качестве ЦАУ использован ПКН, на эталонный вход которого заведено пилообразное напряжение. Такой ПКН представляет собой стандартную кассету размерами 130×140×20 мм3. Преобразователь кода угла выполнен на 2-х микросхемах 505РЕЗ, преобразователи всех необходимых тригонометрических функций занимают объем 4 микросхемы 505РЕЗ и вместе с блоком масштабирования и ГПН размещены в одной стандартной кассете. Коммутаторы сигналов занимают одну кассету. Таким образом, по сравнению с прототипом объем аппаратуры увеличился на 5 стандартных кассет. Однако при формировании радиуса-дальности методом, заложенном в прототипе, т.е. пересчетом каждого элемента дальности, резко усложнится преобразователь координат. Так, например, при масштабе дальности 50 км время развертки радиуса-дальности составит 333·10-6 сек, при дискретности развертки, равной 500 элементов, время одного элемента дальности на экране составит 666·10-9 сек. Для преобразования сферических координат в стереоскопические необходимо выполнить 13 операций сложения, 11 операций умножения и 2 операция деления, что в сумме составит не менее 130 операций сложения при 9-разрядном коде. Таким образом, при пересчете каждого элемента дальности на указанном масштабе развертки время одной операции сложения не должно превышать 5·10-9 сек. Микропроцессор или другое вычислительное устройство с таким быстродействием окажется гораздо сложнее и более громоздким, чем процессор для пересчета координат начала и конца вектора дальности, т.е. суммарный объем аппаратуры прототипа превысит объем аппаратуры предложенного технического решения за счет усложнения преобразователя координат.
Предложенный стереоскопический радиолокационный индикатор первичной информации обладает следующими преимуществами по сравнению с аналогами и прототипом:
- повышенной точностью отображения радиолокационной информации;
- повышенной вероятностью обнаружения радиолокационных целей на фоне помех;
- пространственной фильтрацией изображения случайных помех.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для отображенияиНфОРМАции | 1977 |
|
SU798963A1 |
| Устройство для отображения информации на экране электронно-лучевой трубки | 1980 |
|
SU888183A1 |
| Устройство для отображения радиолокационной информации на экране электронно-лучевой трубки | 1989 |
|
SU1691880A1 |
| ТРЕХМЕРНЫЙ ИНДИКАТОР РАДИОЛОКАЦИОННОЙ СТАНЦИИ | 1998 |
|
RU2140091C1 |
| Цифровой растровый индикатор | 1986 |
|
SU1412461A1 |
| Устройство для отображения радиолокационной информации на экране электронно-лучевой трубки | 1980 |
|
SU938309A1 |
| УСТРОЙСТВО ДЛЯ ИМИТАЦИИ РАДИОЛОКАЦИОННОГО ИЗОБРАЖЕНИЯ МЕСТНОСТИ | 1988 |
|
SU1841035A1 |
| Устройство регистрации электрических сигналов на фотопленке | 1983 |
|
SU1173188A1 |
| УСТРОЙСТВО ОТОБРАЖЕНИЯ ИНФОРМАЦИИ МОНОИМПУЛЬСНОЙ РАДИОЛОКАЦИОННОЙ СТАНЦИИ | 1978 |
|
SU1840890A1 |
| СЕКТОРНЫЙ ИНДИКАТОР МОНОИМПУЛЬСНОЙ РАДИОЛОКАЦИОННОЙ СТАНЦИИ | 1979 |
|
SU1840910A1 |
Изобретение предназначено для отображения трехмерной информации. Достигаемый технический результат - повышение точности отображения информации. Указанный результат достигается за счет того, что индикатор содержит две электронно-лучевые трубки с отклоняющими системами, блок оптической сепарации изображений в комплекте с поляризационными очками, а также видеоусилитель, преобразователь сферических координат в стереоскопические, преобразователи кода в напряжение, три суммирующих усилителя мощности, блок управления, при этом между дополнительными выходами координат конца вектора дальности левой и правой стереопары преобразователя сферических координат в стереоскопические и вторыми входами первого, второго и третьего суммирующих усилителей мощности включены цифроаналоговые умножители, между вторым выходом блока управления и объединенными между собой вторыми входами цифроаналоговых умножителей включен генератор пилообразного напряжения, между дополнительным информационным входом преобразователя сферических координат в стереоскопические и третьим выходом блока управления включен блок масштабирования дальности, содержит также коммутатор сигналов, определенным образом соединенный с соответствующими средствами. 2 ил.
Стереоскопический радиолокационный индикатор, содержащий две электронно-лучевые трубки с отклоняющими системами и оптически соединенные с блоком оптической сепарации изображений в комплекте с поляризационными очками, а также видеоусилитель, выход которого соединен с объединенными между собой модулирующими входами электронно-лучевых трубок, преобразователь сферических координат в стереоскопические, выходы координат начала вектора дальности YO, левой XOL и правой XOR, стереопары которого через преобразователи кода в напряжение соединены с первыми входами первого, второго и третьего суммирующих усилителей мощности соответственно, и блок управления, первый выход которого соединен с управляющим входом преобразователя сферических координат в стереоскопические, отличающийся тем, что, с целью повышения точности определения координат и вероятности обнаружения радиолокационных целей, между дополнительными выходами координат конца вектора дальности Yρ, левой XρL и правой XρR стереопары преобразователя сферических координат в стереоскопические и вторыми входами первого, второго и третьего суммирующих усилителей мощности соответственно включены цифроаналоговые умножители, между вторым выходом блока управления и объединенными между собой вторыми входами цифроаналоговых умножителей включен генератор пилообразного напряжения, между дополнительно введенным информационным входом преобразователя сферических координат в стереоскопические и третьим выходом блока управления включен блок масштабирования дальности, а также введены четыре коммутатора сигналов, сигнальные входы первой пары которых подключены к выходам первого и второго суммирующих усилителей мощности соответственно, а выходы - к соответствующим входам первой отклоняющей системы, а сигнальные входы второй пары подключены к выходам второго и третьего суммирующих усилителей мощности соответственно, а выходы - к соответствующим входам второй отклоняющей системы, при этом управляющие входы коммутаторов в каждой паре объединены между собой и соединены с соответствующими дополнительными выходами блока управления.
| A | |||
| Michael Noll | |||
| Stereographic projections by digital computer | |||
| "Computer and Automation", May, 1965 г., с | |||
| Способ образования коричневых окрасок на волокне из кашу кубической и подобных производных кашевого ряда | 1922 |
|
SU32A1 |

