1
Изобретение огносигся к области электротехнической промышленности и касается контроля параметров контактны систем реле.
Известны способы контроля параметров контактных систем реле, например измерения контактного давления путем прямого измерения усилия в контактной группе 1 - 10.
Однако такие способы требуют зиачигельных затрат времени на осуществление контроля
Известен также способ контроля параметров контактных систем реле путем закрепления реле, точной взаимной ориентации контактов реле и преобразователя давления, блокирования системы ориентации, последующего приведения контактов реле в движение, преобразования давления в количество электричества и формирования в момент размыкания контактов выходного сигнала на основании измерения количества электричества il
Оцнако такой способ не позволяет одновременно с контролем контактного давления контролировать зазор между контактами. Точная: ориентация реле относительно чувствительных элементов системы контроля увеличивает время контроля.
Целью изобретения является расширение функциональных возможностей (одновременный контроль контактного давления нормальноразомкнутых и замкнутых контактов и зазора между контактами) и увеличение скорости контроля.
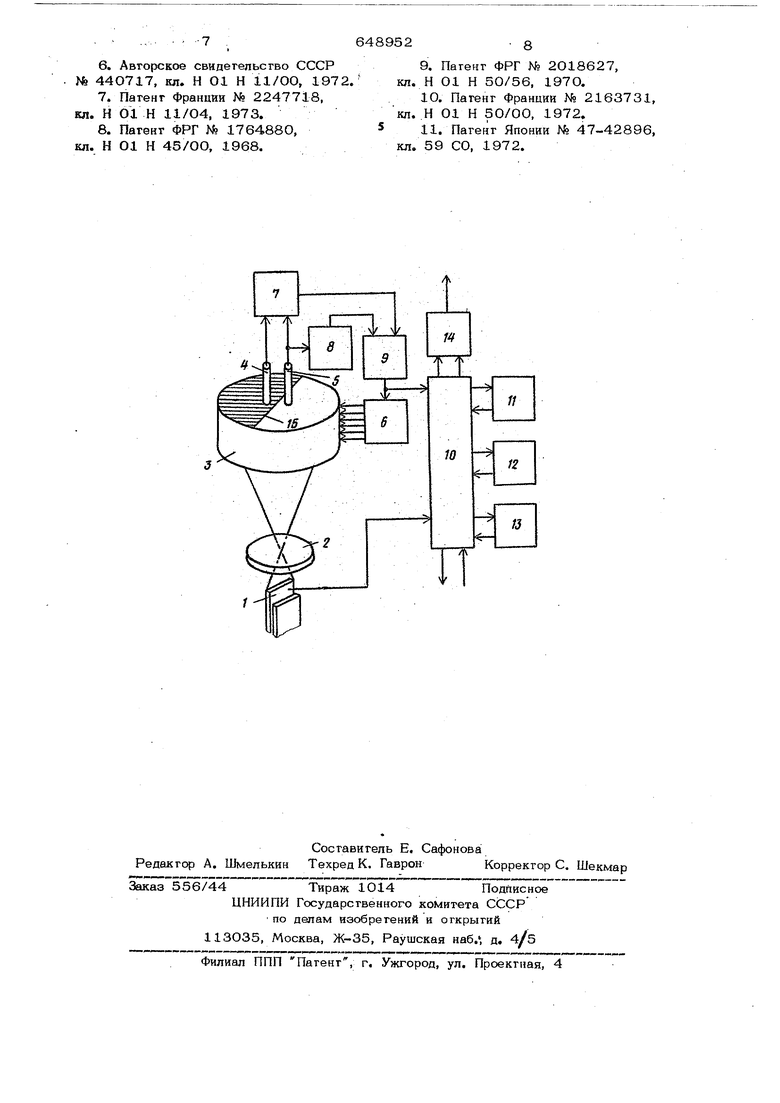
Это достигается тем, что по предложенному способу с помощью отклоняющей системы осуществляют взаимную ориентацию изображения контакта и чувствительных к излучению элементов, сигналы отклоняющей .системы запоминают в начальный момент привеаения конгактов в движение и -в моменты изк енения проводимости контактной системы. С помощью следящей системы во время движения контактов изображение контакта R чувсгвигельные к излучению элементы уаержнваюг взаимно ориентированными., сравнивают мгновенные значения сигнала отклоняющей системы со значениями сигнала, хранящимися в памяти, и полученные данные используют для контроля параметров контактной системы реле. Описываемый способ контроля параметров контактной системы реле реализует устройство, схема которого приведена на чертеже. Устройство содержит установленные вблизи подвижного контакта i контролируемой контактной системы оптически связанные объектив 2 и катодный преобразователь 3 оптического изображения с примыкаюшйма к его экрану двумя прием никами йзиученяя 4 и 5 и отклоняющей системой 6. Приемники напучения 4 и 5 установлены на расстоянии один относител эно другого, при котором сумма этого расстояния а удвоенного размера вход ного окна приемников излучения не превышает допуска на погрешность измерения провала конгакгов, характеризующего усилие. К выходам арнемянков излучения 4 н 5 подключена схема И 7, а к выходу приемника кзйучення 5 инвертор 8. К выходам схемы И 7 и инвертора 8 под ключен интеграРор 9, к выходу которого подсоединены отклоняющая система 6 и коммутатор 1О. Последний подсоединен к контактной системе реле, к коммутатору 1О - запомннаюшие устройства И, 12, 13, блок разности 14 и приводной механизм реле (не показан). Осветители контактной системы (не показаны) разме щены таким образом, чтобы изображение подвижного контакта было двоичным (изо бражение, представленное двумя градациями: темная и светлая части с разделяющей их границей 15, ширина которой пренебрежимо мала). Способ осуществляется следующим образом. Взаимно ориентируют изображение контакта 1 относительно чувствительного к излучению элемента (входов приемников излучения 4 и 5). В результате ориентация границу 15, сформированную на экра не катодного преобразователя 3 и разделяющую светлую и темную части изображения контакта 1, с помощью -отклоняющей системы 6 (отклоняет поток элект роков, распределенный в пространстве и переносящий изображение) размещают меж ду приемниками излучения 4 и 5. Сигнал отклоняющей системы 6 (выходной сигна ИЕ1тегратора 9) запоминают в начальный момент приведения контактов в движение с по мощью запомииаюпюго устройства 11, а также в моменты изменения проводимости контактной сие темы с помощью запоминающих устройств 12 и 13. Разность между сигналом отклоняющей системы 6 в момент пуска приводного механизма и сигналами в последующие моменты характеризует смещение подвижного контакта 1 контролируемого реле, величина смещения контакта 1 на участках контактирования с неподвижным контактом соответствует провалу, по величине которого судят об условиях в контактах, а величина смещения на участке отсутствия контакта соответствует минимальному зазору между контактами (зазору в момент переключения). Величины смещения подвижного контакта 1 на участках от начала движения до встречи с нормально разомкнутым контактом и oi- момента раз лыка11ИЯ нормально замкнутых контактов до момента достижения номинального усилия лриводным механизмом реле соогветствуют зазорам между контактами в разомкнутом и в замкнутом состояниях. Отклоняющая система 6, катодный преобразователь 3 оптического изображения, приемники излучения 4 и 5, схема И 7, инвертор 8 и интегратор 9 образуют замкнутую цепь следящей системы. Следящая система удерживает изображение контакта 1 во время движения в контактной системе ориентированным относительно чувствительных к излучению элементов (границу 15 темной и светлой частей изображения следящая система удерживае т между двумя приемниками излучения 4 и 5), На основании сравнения мгновенных значений сигнала отклоняющей системы 6 со значениями сигналов, хранящихся в устройствах 11,12,13, блок разности 14 формирует выходные сигналы. Устройство работает сяедуккдЕм образом. Изображение подвижного контакта 1 объектив 2 формирует на входном окне ;катодного преобразователя 3. Изображе ние, сформированное на выходном эяра- не преобразователя 3, отклоняющая система 6 по команде коммутатора Ю перемещает до момента попадания границы 15 темной и светлой частей изображения в промежуток, между двумя приемниками излучения 4 и 5. .Изображение
перемемаегся n направлении, совпадаюшем с направлением движения контакта, поп действием приводного механизма реле, В момент попадания границы 15 в промежуток между приемниками излучения 4 и 5 комглутатор 1О посьшает Сигнал, пропорциональный действующему в отклоняющей системе (например токовому сигналу в отклонякяцйх катушках), на запоминающее устройство 11 и одновременно включает привод реле. При этом усилие, развиваемое приводом, возрастает. Увеличение усилия происходит со скоростью, исключающей погрешность динамического характера, и регулируется интегратором 9, Процесс роста длится до достижения номинального значения усилия. Закон изменения усшгая во времени несущественен, так как временные отрезки в предложенном спо.собе не контролируются В момент размыкания нормально замкнутых контактов коммутатор 10 подает на входы блока разности 14 сигнал, хранящийся в памяти запоминающего устройства 11, и сигна/ь действующий в этот момент в отклоняющей cvfcre« ме 6. Одновремен {о сигнал, действуюш тй в опшоияющей сие теме 6, коммутатор Ю подает на запоминающее устройство 12. Сигнал на выходе блока 14 в этот момент характеризует провал норм.эльЕЮ замкнутых контактов, Б момент замыкания нормально разомкнутых кон тактов коммутатор 1О подает на входы блока разности 14 сигнал, храншиийся в памяти запоминаютегх) устройства 12, и сигнал, действующий в отклоняющей системе 6 Сигнал на выходе блока 14 в этот момент характеризует наименьший зазор между контактами в режиме переключения. Сигнал, действующий в отклоняющей системе 6, коммутатор 1О подает на запоминающее устройство 13. Затем ком- мутагор 1О подает на входы блока разности 14 сигналы, хранящиеся в памяти запоминаюгиих устройств 11 и 13. Сигнал на выходе блока 14 характеризует при этом зазор между контактами реле в отключенном состоянии, В момент достижения номинального,усилия приводным механизмом реле, коммутатор 1О подает на входы блока разности 14 сигнал, хранящийся в памяти запоминающего устройства 13, и сигнал, действующий в отклоняющей системе 6. Сигнал на выходе блока 14 в этот момент харак1 еризует провал нормально разомкнутых контактов, йадее коммутатор 10 подает на входы
блока 14 сигнал, хранящийся в памяти запоминающего устройства 12, н сигнеш, действуклций в отклоняющей системе 6. Сигнал на выходе блока 14 при этом ха-
рактеризует зазор между контактами реле во включенном состоянии.
Быстродействие устройства контроля параметров контактной системы определяет следящая система, удерживающая
границу светлой и темной частей изображения в пределах зоны нечувствитепьносги. Наиболее инерционный элемент этой системы - покрытый люминофором. экран - ограничивает быстродействие
системы до величины Ю сек, Эгого быстродействия достаточно для осуществления контроля параметров реальных контактных систем реле,
20
Формула наобре.ения
Способ контроля параметров контакт ной системы реле путем закрепления реле, взаимной ориентации элементов и последующего приведения контактов реле в движение, отличающийся тем, что, с целью расширения функциональных возможностей и увеличения CKCNрости контроля, с помощью отклоняющей системы осуществляют взаимную ориентацию изображения контакта и чувствительных к излучению элементов, сигна™ лы отклоняющей системы запоминают в начальный момент приведения контактов реле в движение н в моменты изменения проводимости контактной системы, во время движения контактов реле изображение контакта и чувствительных к нэлучению элементов с помощью следящей системы удерживают взашушо ориентированными и выходные сигналы формируют на основании сравнения к-сгновенных зна- 1ений сигнала отклоняющей сисгемы со значеЕ1Иями сигнала, хранящимися в памяти.
Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР № 414648, кл. Н 01 Н 49/ОО, 1972.
2.Авторское свидетельство СССР
№ 411535, кл. Н О1 Н 49/ОО, 197О.
3.Авторское свидетельство СССР
№ 408389, кл. Н О1 Н 49/ОО, 1972,
4.Авторское свидетельство СССР
№ 389563, ад. Н Ol Н 49/ОО, 1971.
;S. Авторское свидетельство СССР № 345474, кл. Q-OS В 23/О2, 197О..
6.Авторское свндегельсгво СССР
№ 440717, кл. Н 01 Н ll/OO, 1972.
7.Патент Франции № 2247718, кл. Н О1 Н 11/04, 1973.
8.Патент ФРГ № 1764880, кл. Н О1 Н 45/ОО, 1968.
9.Патент ФРГ № 2О18627, кл. Н 01 Н 50/56, 1970.
10.Патент Франции М 2163731, кл. Н 01 Н 50/00, 1972.
11.Патент Японии № 47-42896, кл. 59 СО, 1972.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ контроля провала контактов реле | 1976 |
|
SU591972A1 |
| Способ контроля параметров контактной системы электромагнитного реле | 1983 |
|
SU1257721A1 |
| Устройство для определения деформаций горных пород | 1983 |
|
SU1209856A1 |
| Устройство для масштабно-временного преобразования импульсных сигналов | 1976 |
|
SU652730A1 |
| Устройство для обнаружения неоднородностей в изображениях объектов | 1976 |
|
SU590779A1 |
| Способ распознавания изобрвжений фигур | 1976 |
|
SU583459A1 |
| Устройство для подсчета плоских предметов | 1981 |
|
SU1005111A1 |
| КОДОВАЯ ОПТИКО-ЭЛЕКТРОННАЯ СИСТЕМА | 1993 |
|
RU2034124C1 |
| Многоканальный преобразователь код-угол | 1975 |
|
SU526935A1 |
| Устройство для ориентации сейсмоприемников в скважинах | 1982 |
|
SU1124236A1 |
