позиционного кулачка, а релейный переключатель дополнительно связан с разнополярным кольцевым
посредством блои блока декоди




| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для ориентации сейсмоприемников в скважинах | 1979 |
|
SU894645A1 |
| Устройство для ориентации сейсмоприемников в скважине | 1980 |
|
SU935851A1 |
| Устройство для ориентации сейсмоприемников в скважине | 1982 |
|
SU1053039A2 |
| Устройство для ориентации сейсмоприемников в скважине | 1980 |
|
SU920605A1 |
| СЕЙСМИЧЕСКИХ ИССЛЕДОВАНИЙ В СКВАЖИНАХ | 1972 |
|
SU356611A1 |
| Трехкомпонентное сейсмокаротажное устройство | 1978 |
|
SU1133572A1 |
| УСТРОЙСТВО ДЛЯ ВИЗУАЛЬНОГО ИССЛЕДОВАНИЯСКВАЖИН | 1971 |
|
SU309122A1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ЗЕНИТНЫХ И АЗИМУТАЛЬНЫХ УГЛОВ СКВАЖИН | 2011 |
|
RU2459951C1 |
| Гидролокатор | 1957 |
|
SU116769A1 |
| УСТРОЙСТВО ДЛЯ ДИСТАНЦИОННОГО ИЗМЕРЕНИЯ СКОРОСТИ и НАПРАВЛЕНИЯ ТЕЧЕНИЙ | 1968 |
|
SU221330A1 |
УСТРОЙСТВО ДЛЯ ОРИЕНТАЦИИ СЕЙСМОПРИЕМНИКОВ В СКВА}ЮНАХ, содержащее скважинный снаряд и связанный с ним семижильным бронированным кабелем Наземный пульт управления, причем в корпусе скважинного снаряда установлены контейнер с сейсмоприемниками, гироскоп и арретирующий его механизм с контактной группой, первый круговой, преобразователь угла на оси наружной рамы гироскопа,. исполнительный привод контейнера, блок питания скважинного снаряда, механизм прижима, разнополярный кольцевой распределитель и второй круговой преобразователь угла на оси контейнера и корпусе скважинного снаряда, а в наземном пульте управления установлены блок питания, регистрирующий прибор, третий круговой преобразователь угла на оси регистрирующего прибора и корпусе наземного пульта управления, исполнительный привод оси регистрирующего прибора, ориентирующий механизм с контактной группой, реле времени разгона и реле времени торможения ротора гироскопа и релейный переключатель, при этом релейный переключатель связан с реле времени разгона и реле времени торможения ротора гироскопа, блоком питания, исполнительным приводом регистрирующего прибора и третьим круговым преобразователем угла, а через семижильный бронированный кабель и разнополярный кольцевой распределитель - с блоком питания скважинного снаряда, исполнительным приводом контейнера, первым и вторым круговыми преобразователями угла, арретирующим механизмом и механизмом прижима. Отличающееся тем, что, с целью повышения точности измерений путем повышения точности ориентации, оно дополнительно W содержит четвертый круговой преобразователь угла на оси контейнера и корпусе скважинного снаряда, датчикуровень на контейнере, блок кодирования в наземном пульте управления, блок декодирования в скважинном снаряде, при зтом горизонтальные сейсмоприемники установлены в контейнере tc в одноосных рамках с отвесами, верOlii тикальный сейсмоприемник установлен IN9 в корпусе скважинного снаряда в карСО дановом подвесе с отвесом, причем о рамки подвесов сейсмоприемников и внутренняя рама гироскопа снабжены фрикционными арретирами, арретирующий механизм гироскопа содержит двойной трехпозиционный кулачок с приводом, кинематически связанный через упругие развязки с фрикционными арретирами гироскопа и сейсмоприемников, разнополярный кольцевой рас- . пределитель связан с четвертым круговым преобразователем угла, датчиком-уровнем, с приводом двойного трех
Изобретение относится к устройствам для сейсмических исследований методом вертикального сейсмического профилирования ;(ВС11) И предназначено дпя получения ориентированных на источник возбуждения сейсмических записейи измерений на их основе .параметров вектора смещения частиц в вертикальной и горизонтальной плоскостях, Известно устройство, в котором установлены гиростабилизатор с Кулаковым арретиром датчиком гироскопа (преобразователем угла); нд его внутренней раме, усилителем мощности и двигателем,с редуктором на его наруж ной раме, которая связана с осью кон тейнера для сейсмоприег иков через датчик угол-код, связанный в цифровом следящем приводе с усилителем мощности и двигателем с редуктором н оси вращения контейнера СП. Недостатками известного устройства являются необходимость учета в каждой точке ориентации приборных сбоев, которые вызваны кулачковым арретиром, низкая точность передачи начала отсчета из-за сбоев в системе гиростабилизации, которые вызваны значительными угловыми скороетями и ускорениями корпуса скважинного снарада под воздействием крутящего момента каротажного кабеля, значительное время готовности из-за отсутствия систем уменьшения време.ни выбега ротора гироскопа после снятия питания, значительная потребляемая мощность из-за одновременной работы всех систем. Кроме того, циф|ровая система управления и цифровая следящая система требуют применения значительного количества элементов, которые в геотермальных условиях скважины малонадежны, Наиболее близким к предлагаемому является устройство для ориентации сейсмоприемников в скважинах, содер жащее скважинный снаряд и связанный с ним семижильным бронированным кабелем наземный пульт управления, причем в корпусе скважинного снаряда установлены контейнер с сейсмоприемниками, гироскоп и арретирующий его механизм с кбнтактной группой, первый круговбй преобразователь угла на оси наружной, рамы гироскопа, исполнительный привод контейнера, блок питания скважинного снаряда, механизм прижима, разнополярный кольцевой распределитель и второй круговой преобразователь угла на оси контейнера и корпусе скважинного снаряда, а в наземном пульте управления установлены блок питания, регистрирующий прибор, третий круговой преобразователь угла на оси регистрирующего прибора и корпусе наземного пульта управления, исполнительный привод оси регистрирующего прибора, ориентирующий механизм с контактной группой, реле времени разгона и реле времени торможения ротора гироскопа и релейный переключатель, при этом релейный переключатель связан с реле времени разгона и реле времени торможения ротора гироскопа, блоком питйния, исполйительным приводом регистрирующего прибора и третьим круговым преобразователем угла, а через семижильный бронированный кабель и разнополярный, кольцевой распределитель - с блоком- питания скважинного снаряда, нсполнительным приводом контейнера, пер- .вым и вторым круговыми преобразователя.ма угла, арретирующим -механизмом и механизмом прижима С2, Недостатками известного устройства являются значительная потребляемая мощность скважинным снарядом в циклах Совмещение осей и Ориентация из-за одновременного использования потребителями электроэнергии в скважинном снаряде; низкая точ3
ность измерений из-за отсутствия независимой коррекции положения главной оси гироскопа и искажений сейсмических сигналов при наличии наклонов оси скважины, которые превышают угловые допуски установки сейсмоприемников; необходимость учета приборных сбоев, значительное время .готовности в каждой точке измерения из-за необходимости использования . гиромотора со значительным кинетическим моментом и ограниченность возможностей дистанционной системы управления.
Цель изобретения - повышение точности измерений путем повышения точности ориентации.
Поставленная цель достигается тем, что устройство для ориентации сейсмоприемников в скважинах, содержащее скважинный снаряд и связанный с ним семижильным бронированным кабелем наземный пульт управления, причем в корпусе скважинного снаряда установлены контейнер с сейсмоприемниками, гироскоп и арретирующий его механизм с контактной vpynпой, первый круговой преобразователь угла на оси наружной рамы гироскопа исполнительный привод контейнера, блок питания скважинного снаряда, механизм прижима, разнополярный кольцевой распределитель и второй круговой преобразователь угла на оси контейнера и корпусе скважинного сна ряда, а в наземном.пульте управления установлены блок питания, регистрирующий прибор, третий круговой преобразователь угла на оси регистрирующего прибора и корпусе наземного, пульта управления, исполнительный привод оси регистрирующего прибора, ориентирующий механизм с контактной группой, реле времени разгона и реле времени торможения ротора гироскопа и релейный переключатель, при этом релейный переключатель связан с реле времени разгона и реле времени торможения ротора гироскопа, блоком питания, исполнительным приводом регистрирующего прибора и третьим круговым преобразователем угла, а через семижильный бронированный кабель и разнополярный кольцевой распределитель - с блоком питания скважинного снаряда, исполнительным приводом контейнера, первым и вторым круговыми преобразователями угла, арретируюпщм механиз42364
мом и механизмом прижима, дополнительно содержит четвертый круговой преобразователь угла на оси контейнера и корпусе скважинного снаряда, датчик-уровень на контейнере, блок кодирования в наземном пульте управления, блок декодирования в скважинном снаряде, при зтом горизонтальные .сейсмоприемники установлены в контейнере в одноосных рамках с отвесами, вертикальный сейсмоприемник установлен в корпусе скважинного снаряда в кардановом подвесе с отвесом, причем рамки подвесов сейсмоприемников и внутренняя рама гироскопа снабжены фрикционными арретирами, арретирующий механизм гироскопа содержит двойной трехпозицион ный кулачок с приводом, кинематически связанный через упругие развязки с фрикционными арретирами гироскопа и сейсмоприемников, разнополдрный кольцевой распределитель связан с четвертым круговым преобразователем угла, датчиком-уровнем и с приводом двойного трехпозиционного кулачка, а релейный переключатель дополнительно связан с разнополярным кольцевым распределителем посредством блока кодирования и блока декодирования,
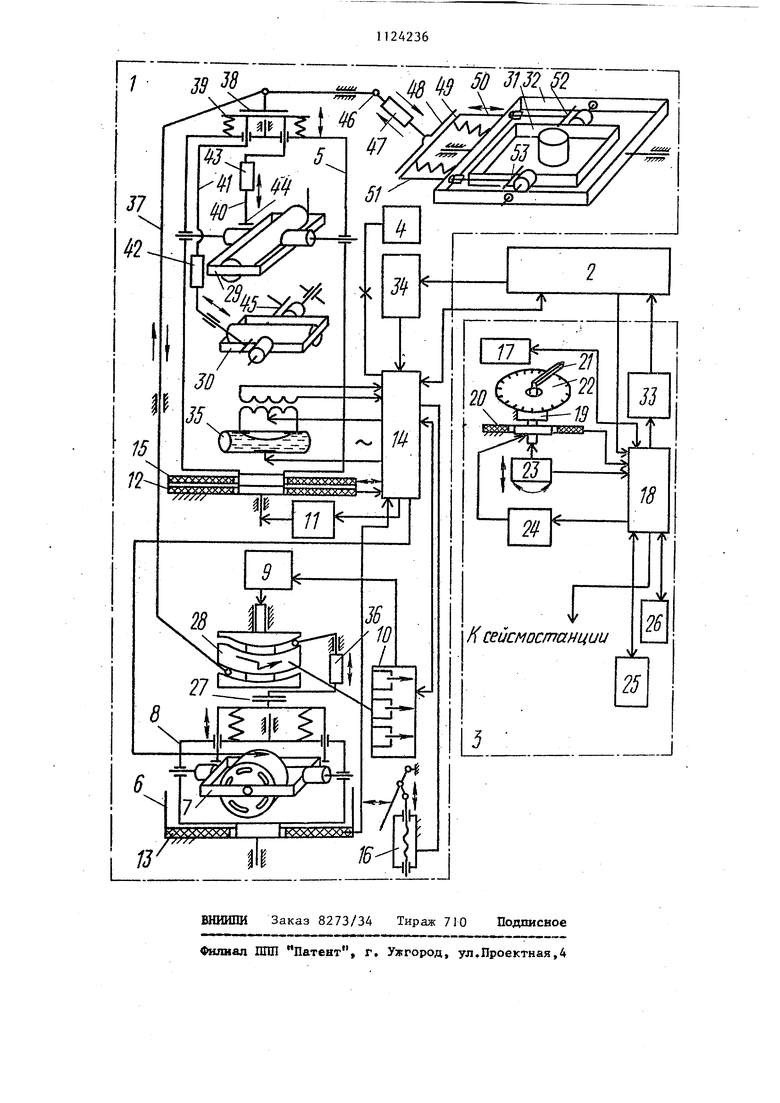
На чертеже изображена структурная схема устройства для ориентации сейсмоприемников в скважинах.
Устройство состоит из скважинного снаряда 1 и связанного с ним че5 рез семижильный бронированный каротажный кабель 2 наземного пульта 3 управления,
В снаряде 1 расположены блок 4 питания скважинного снаряда с пони0 жающим трансформатором, контейнер 5 с сейсмоприемниками, гироскоп 6 с его внутренней 7 и наружной 8 рамами, привод 9 арретира, блок 10 контактных групп, исполнительный привод5 1 контейнера, состоящий из усилите ля мощности, исполнительного электродвигателя, редуктора и кинематической пары на оси. вращения- контейнера 5, круговой преобразователь 12
0 угла на контейнере 5 и корпусе снаряда 1 и круговой преобразователь 13 угла на наружной раме 8 гироскопа 6 и корпусе снаряда I, разнополярный кольцевой распределитель 14, круго-
5 вой преобразователь 15 угла на контейнере 5 и корпусе снаряда 1 и прижимной механизм 16. В пульте 3 расположены блок 17 питания с повышающим трансформатором, синхронный с распре делителем 14 и с блоком 10 релейный переключатель 18, регистрирующий .прибор 19 с круговым преобразовате,лем 20 угла, стрелкой 21 и подвижной шкалой 22 на его оси, ориентирующий механизм 23 с контактной груп пой, циклически связанной с релейным переключателем 18 и ручкой (не показана |, исполнительный привод 24, который состоит из усилителя мощности, исполнительного электродвигателя с редуктором и кинематической пары на оси регистрирующего прибора 19, циклически связанные с релейным переключателем 18 реле 25 времени разгона и реле 26 времени торможения ротора- гироскопа. В снаряде 1 и в пульте 3 главная -ось гироскопа 6 связана с осью в контейнере 5 через первый местный следящий привод, состоящий из связанных через распределительi 14 преобразователя 13 (например, сельсина в режиме датчика, преобразователя 12 в режиме приемника и привода 11, ось контейнера 5 связана с осью стрелки 21 в приборе 19 через первый дистанционный следящий привод, выполненный из связанных через распределитель 14, жилы кабеля 2 и коммутатор I8 преобразователя 15,.например сельсина, в .режиме датчика, преобразователя 20 в режиме приемника, а шкала 22 связана с осью контейнера 5 через механизм 23 и второй дистанционный еле- дяющий привод, выполненный из связан ных через релейный переключатель 18 жилы кабеля и через распределитель 14 преобразователя 20 в режиме датчика, преобразователя 15 в режиме приемника и привода 11. Кроме того, в снаряде 1 установлены фрикционный арретир 27 трехстепенного гироскопа, трехпозиционный двухкулачковый механизм 28 арретиров на выходном валу привода 9 арретира, горизонтальные сейсмоприем ники на контейнере 5 в одноосных рам ках 29 и 30 с отвесами (не показаны и фрикционными элементами, например цилиндрами на их осях, вертикальный сейсмоприемник на корпусе снаряда 1 в кардановом подвесе, который выполнен из внутренней рамки 31 с отвесом (не показан) и фрикционными элементами, например цилиндрами на ее оси и наружной рамки 32, блок 33 кодирования в пульте 3, который выполнен например, из настроенных на различные частоты генераторов и системы набора комбинации частот.(( шифратора,), и блок 34 декодирования в снаряде 1, который НзШолнен из селективных реле и системы вывода зашифрованных сигналов (дешифратора),, датчик-уровень 35 визирной плоскости на контейнере 5 вдоль оси одного из горизонтальных сейсмоприемников. При этом ось в контейнере 5 дополнительно связана с осью в плоскости наклона оси скважины через второй местньй следящий привод,который состоит из связанных через трансформатор и кольцевой распределитель 14 датчикауровня. 35 и привода 11, ось гироскопа 6 с осью стрелки ,21 - через третий дистанционный следящий привод, который состоит из привода 24, преобразователя -13.в режиме датчика и связанного с ним через кольцевой распределитель 14, жилы кабеля 2 и синхронный коммутатор 18 преобразователя 20 в режиме приемника. Первый кулачок механизма 28 через первый толкатель 36 с упругой развязкой и фрикцио1га:ый арретир 27 ( арре- тирующая система гироскопа связан с ротором гироскопа 6, а второй с осью контейнера 5, корпусами горизонтальных сейсмоприемников и через второй толкатель 37 - с фрикционным (элементом 38, например диском, фрикционным элементом 39, например диском, на контейнере 5 с возможностью свободного вращения вдоль его оси на штоках 40 и 41 с упругими развязками 42 и 43, и фрикционными парами 44 и 45 (например фрикционными торцами на штоках и фрикционными цилиндрами на осях рамок, а также с корпусом вертикального сейсмоприемника через толкатель 37, звеньевой механизм 46 с упругой развязкой 47 и фрикционным элементом 48, например диском, фрикционный элемент 49, штоки 50 и 51, фрикционные пары 52 и 53 на штоках 50 и 51 и оси внутренней рамки 31.(арретирующая система сейсмоприемников ), Релейный переключатель 18 через блок 33, седьмую жилу кабеля 2, блок 34 (селективная система) и кольцевой распределитель 14 ци1шически связан со следяющими приводами,.обмоткой ротора гироскопа 6, прижимным механизмом 16 и через них и блок IО - дополнительно с ар- ретирующими системами. В исходном состоянии Регистрация в котором производится и транспортировка устройства, цепи сейсмоприем,НИКОВ через распределитель 14, жилы кабеля 2 и коммутатор.18 связаны с клеммами Сейсмостанция в пульте 3, а ротор гироскопа и корпусы сейг смоприемников заарретированы посредством арретирующих систем гироско-. па и сейсмоприемников и механизма 28 Включение устройства осуществляет ся автоматически, Цри этом за время нажатия кнопки Включение зонда (не показана) в пульте 3 .в релейном переключателе 18 подготавливаются, например, первые цепи синхронизации и через него жилы коммутируются с клемм Сейсмостанция на цепи питания и управления и запускается блок 17 питания, а в снаряд 1 поступает первый, например положительный, управляющий сигнал, посредством которого жилы через распределитель 14 пе реводятся с цепей сейсмоприемников И связываются (например, первые три жилы с блоком 4 питания, а последНИИ - с обмоткой ротора гироскопа 6 Б момент коммутации жил в снаряде I в пульт 3 по четвертой, например, жиле поступает первый синхронизирующий сигнал (замыкание цепи), посредством которого через первые цепи синхронизации релейный переключатель 18 связывает блок 17 питания сЪервыми тремя жилами и запускает реле 25, которым нормируется время разгона ротора гироскопа 6, зави Ьящее от глубины погружение снаряда А, длины и марки кабеля 2, В конце цикла Разгон ротора гиipocKona реле 25 через релейный пер 1ключатель18 и седьмую жилу посылает в Снаряд 1 второй, например от рицательный, импульс, посредством к торого распределитель 14 связывает привод 9 арретира через первую контактную группу блока 10 с блоком 4 питания. Приведенный в движение от привода 9 механизм 28 арретиров развязывает ротор гироскопа .6 с арретирующей системой гироскопа и уде живает в заарретированном состоянии ось контейнера 5 и корпусы сейсмоприемников через арретирующую систему сейсмоприемников. в момент разарретирования ротора гироскопа 6 механизм 28 через первую контактную группу снимает питакие с двигателя привода 9 и переводит новых три жилы в распределителе 14 на коммутирующие элементы, связанные с блоком 34 декодирования селективных реле с дешифратором, В момент коммутации жил в снаряде 1 в пульт 3 поступает второй синхронизирующий сигнал (разрыв в цепи четвертой жилы, посредством которого в релейном переключателе 18 новые жилы переводятся на коммутирующие элементы,синхронно связанные с блоком 33 кодирования генераторов с шифратором, . В образованном после включения зонда, разгона и разарретирования ротора гироскопа 6 режиме Совмещение осей производится передача гироскопом 6 начала отсчета ( угла ориентации ) при...спускоподъемных операциях скважинного снаряда 1 в точки измерения и осуществляются последовательно и выборочно посредством селективной системы циклы Совмещение осей регистрирующего прибора с глав- ной осью гироскопа, Прижатие и отжатие скважинного снаряда, Совмещение осей контейнера и регистрирующего прибора с главной осью гироскопа, Совмещение осей регистрирующаго прибору с азимутом плоскости наклона оси скважины, Ориентация и Контроль. При этом посредством органов управления релейный переключа-. тель 18 образует свои для каждого цикла системы и узлы в пульте 3, связывает из через коммутирующие эле1менты с жилами и в седьмой жиле формирует через блок 33 зашифрованную комбинацию частот, посредством которой, через блок 34 и коммутирующие элементы распределителя 14 в снаряде 1 образуются соответствующие системы и узлы, В цикле Совмещение осей регистриг рующего прибора с главной осью гироjCKona, в котором главная ось связа|на с осью стрелки 21 через третий дистанционный следящий привод на время нажатия к-нопки в пульте 3 I не показана ), перед спуском снаряда 1 в скважину через шкалу 22 и визир- ную вилку на корпусе снаряду 1 (не показана) осуществляют определение положения главной оси гироскопа в пространстве и ее совмещение с плоскостью, например, географического меридиана и кратковременное наблюдение за вращением корпуса снаряда 1 во время спускоподъемных операций. 9 Кратковременность пользования этим циклом обусловлена возмущающим моментом, который прикладывается к гироскопу 6 через его наружную раму 8от связанных между собой круговых преобразователей 13 и 20. В цикл Прижатие и отжатие скважинного снаряда устройство переводится на время нажатия кнопок в пул те 3 (не показаны К При этом релейный переключатель 18 и распределител 14 через жилы в параллель для умень шения потерь в кабеле 2 связывают с источником в блоке 17 привод прижимного механизма 16 и реверсируют его. При обеспечении выборочно, . любо го из циклов Coвмeщe иe осей контейнера и регистрирующего прибора с главной осью гироскопа, Совмещение осей контейнера и регистрирующего прибора с азимутом плоскости наклона оси скважины и Ориентация распределитель 14 через вторую контактную группу блока 10 связывает с блоком 4 питания двигатель привод 9арретира, Гфи этом в конце аррети рования; механизм 28 через арретирую щую систему гироскопа связывает ротор гироскопа 6 с корпусом снаряда 1 и развязывает с ним ось контейнера 5, корпусы сейсмоприемников через арретирующую систему сейсмоприемников, а посредством сигнала от второ контактной группы в момент выключения двигателя через распределитель 14 с блоком 4 развязывается обмотка ротора гироскопа 6 и связывается с ним система 11.. В цикле Совмещение осей контей нера и pe иcтpиpyющeгo прибора с главной осью гироскопа, в котором главная ось связанас осью стрелки 21 через первый местный и первый дистанционный следящие приводы, осуп;ествляется исключение из значений uij, ориентации в каждой точке из мерения углов поворота, корпуса сна ряда I вокруг его оси путем совмеще Ния нулевой риски на подвижной шкале 22 с .осью стрелки 21. Б цикле Совмещение осей контейнера и регистрирующего прибора с азимутом плоскости наклона оси сква жины, в котором ось инклинометра связана с осью стрелки 21 через вто рой местный и первый дистанционный следящие;, приводы, осуществляется 36 совмещение начала отсчета с азимутом плоскости наклона оси скважины также путем совмещения нулевой риски на щкале 22 с осью стрелки 21. В цикле Ориентация ручка ориентирующего механизма 23 (не показана) при ее нажатии выходит из зацепления с кинематической парой исполнительной системы 24 и входит в зацепление с осью регистрирующего прибора 19, а посредством сигнала от контактной группы механизма 23 (не показана) релейный переключатель 18 образует второй дистанционный .следящий при- вод. Вращением ручки ос 6 поворачивается на угол u)(j ориентации, который отсчитывают по шкале 22 против оси стрелки 2 1. Угол w отсчитывается от положения главной оси гироскопа 6 при наличии углов наклона оси скважины и без них. Контроль поворота контейнера 5 осуществляется возвратом ручки механизма 23 в исходное состояние. При этом ось регистрирующего прибора 1 9 выходит из зацепления с ручкой и входит в зацепление с кинематической парой исполнительной системы 24, а посредством сигнала от контактной группы, который сформирован в цикле Ориентация, переключатель 18 образует первый дистанционный следящий привод, и если ось Б не до-; вернута на угол и)о ориентации,то и ось стрелки 21 займёт положение на шкале 22, отличное OT.LO. В исходное состояние Регистрация устройство переходит автоматически. При этом от сигнала кнопки выключение в пульте 3 (не показана релейный переключатель 18 через свои коммутирующие элементы переводит жилы на вторые цепи синхронизации и в снаряд 1 по седьмой жиле посылает положительный импульс, посредством которого в распределителе 14 жилы переводятся с коммутирующих элементов на синхронизирующие цепи. Через третью контактную группу блока 10 и через подготовленные цепи от сигнала второй контактной группы блока 10 в режиме Совмещение осей распределитель 14 связывает с блоком 4 двигатель привода 9 арретира. Приведенный в движение механизм 28 удерживает в заарретированном состоянии ротор гироскопа 6 через арретирующую систему гироскопа и приводит ,в заарретированное состояние ось вращения, контейнера 5, корпусы сейсмоприемников в плоскости горизонта и корпус вертикального сейсмоприемника вдоль отвесной линии посред.ством арретирующей системы сейсмоприемников. В конце арретирования в момент выключения.двигателя привода 9 распределитель. 14 посредством сигнала от механизма. 28 через третью кон- тактнзда группу блока 10 связывает с блоком 4 питания ротор гироскопа и посьшает в пульт 3, например, по пятой жиле, синхронизирующий сигнал (замыкание цепи), посредством которого через-релейный переключатель 18 запускается реле 26 времени торможения ротора гироскопа и обращают ся фазы питающего снаряд 1 источник в блоке 17, чем сводится к минимуму время выбега ротора гироскопа 6. В конце цикла торможения ротора, длительность которого устанавливае ся оператором: в зависимости от тем пературы, окружающей снаряд 1 среды, длины и марки кабеля 2, посредством сигнала от реле 26 релейный переклю чатель 18 развязывает блок 1 питания с жилами и по седьмой жиле посьшает в сиаряд 1 отрицательный управляющий сигнал, посредством которого в распределителе 14 все релейные элементы врзращаются в исходное состояние. В момент коммутации жил цепи сейсмоприемников по пятой жиле в пульт 3 поступает синхронизирующий си гнал Д разрыв цепи), посред ством которого релейный переключатель 18 переводит жилы на,клеммы, Сейсмостанция. Коррекцию положения главной оси . гироскопа в пространстве осуществляют путем нахождения ее азимута АС в точках, где азимут Ау, осиинклинометра известен и угол наклона оси скважины достаточен для восстановления азимута А, через соотношение ,.,Угoл ш измеряют в циклах Совмещение осей контейнера и регистрирующего прибора с азимутом плоскости наклона оси скважины и Совмещение осей контейнера и регистрирующего прибора с главной осью гироскопа. Возможно использование устройства в многоточечном варианте. Селективная система позволяет последовательно подключать к кабелю точки зонда для выполнения режимов включения зонда, выборочно осуществлять в каждой точке режимы совмещения осей Ипоследовательно производить режимы выключения зонда. Возможность коррекции положения главной оси свободного от возмущающих моментов датчиков угловой информации гироскопа,у которого отсут- ствует связь его наружной рамы с корпусом через редуктор и который обеспечен фрикционным арретиром, арретирующий ротор трехстепенного гироскопа в одном.и том же пространственном положении позволяет использовать в точках многоточечного зонда миниатюрные гироскопические узлы при повышении точности ориентации. Кроме того, достигается сокращение сроков геологоразведочных работ при сокращении потребляемой мощности. Последнее имеет обратную связь, т.е. чем (4еньше потребляемая мощность скважинным снарядом, тем выше готовность устройства за счет его минимальных размеров, , улучшение условий проводки по стволу скважины снаряда . и облегчения организационных мероприятии, которые необходимы в полевых условиях при обслуживании мощных передвижных источников знергоснабжения.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Устройство для ориентации сейсмоприемников в скважине | 1980 |
|
SU935851A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Устройство для ориентации сейсмоприемников в скважинах | 1979 |
|
SU894645A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
