Изобретение относится к раДиосвязи и может быть использовано при Наклонном зондировании для определения оптимальных рабочих частот в адаптивных системах связи. Известно устройство для определения оптимальных рабочих частот, содержащее на передающей стороне кодер команд и последовательно соединенные модулятор широкополосного многочастотного сигнала и широкополосный передатчик, а на приемной стороне - блок выбора субоптимальной частоты и последовательно соединенные щирокополосный приемник, демодулятор щирокополосного многочастотного сигнала и декодер команд, при этом выход широкополосного приемника подключен к входу блока выбора субоптимальной частоты 1. Однако, известное устройство для определения оптимальных рабочих частот обладает невысокой точностью определения оптимальных рабочих частот в условиях мнОголучевости, которые приводят к селективным замираниям и межсимвольной интерференции, снижающим верность и скорость передачи информации. Цель изобретения - повышение точности определения оптимальных рабочих частот в условиях многолучевости. Для этого в устройство для определения оптимальных рабочих частот, содержащее на передающей стороне кодер команд и последовательно соединенные модулятор широкополосного многочастотного сигнала и шйрокОполосный передатчик, а на приемной стороне - блок выбора субоптимальной частоты, и последовательно соединенные широкогголосный приемник, демодулятор широкополосного многочастотного сигнала и декодер команд, при этом выход широкополосного приемника подключен к входу блока выбора субоптимальной частоты, на передаю щей стороне введены блок синхронного управления и последовательно соединенные формирователь импульсов зондирования и коммутатор, выход которого соединен с входом модулятора щирОкопоЛосногО сигнала, а второй и третий входы коммутатора соединены с выходами кодера команд, к управляющему входу которого подключен первый выход блока синхронного управления, второй выход которого соединен с управляющим
входом широкополосного передатчика, а дополнительный выход кодера команд подключен к входу формирователя импульсов зондирования, второй вход которого соединен с вторым входом коммутатора, на приемной стороне введены блок синхронного управления и последовательно соединенные блок измерения многолучевости и блок обработки результатов, к управляющему входу которого подключен первый выход блока синхронного управления второй и третий выходы которого соединены соответственно с управляющими входами широкополосного приемника и блока выбора субоптимальной частоты, выход которого подключен к первому входу блока измерения многолучевости, второй вход которого соединен с выходом декодера команд.
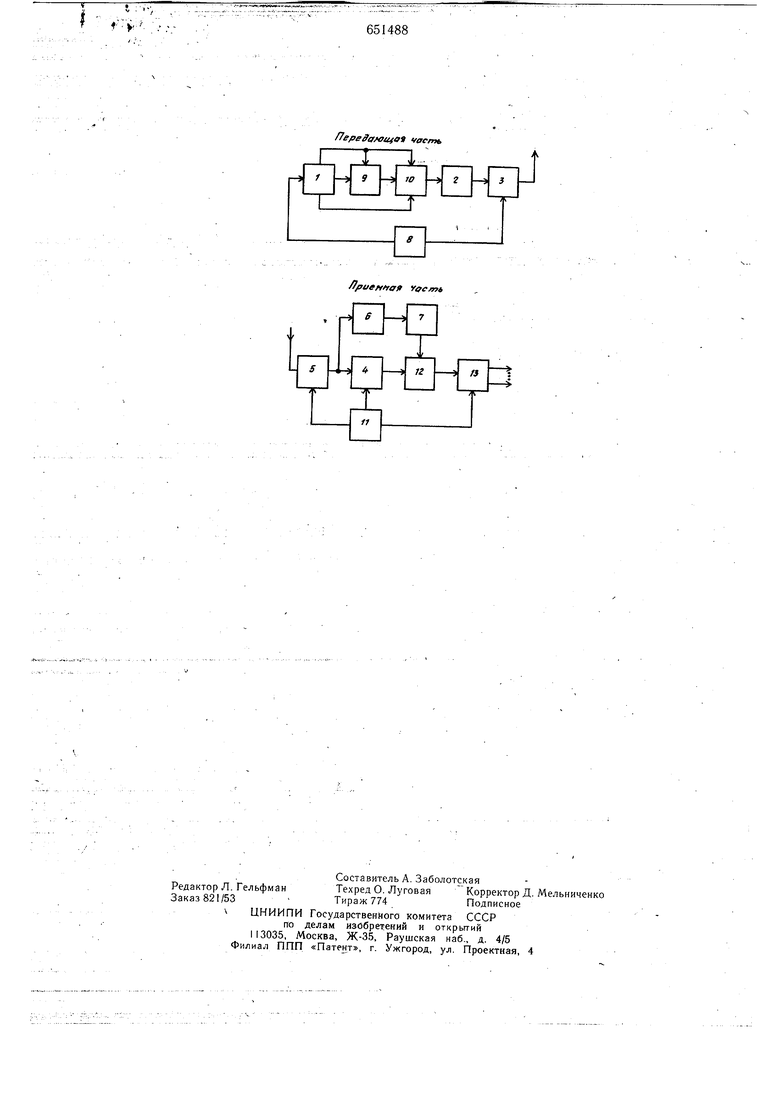
На чертеже приведена функциональная электрическая схема передающей и приемной частей, устройства для определения оптимальных рабочих частот.
Устройство для определения оптимальных рабочих частот содержит на передающей стороне кодер команд 1 и последовательно соединенные модулятор 2 широкополосного многочастотного сигнала и щирокополосный передатчик 3, а на приемной стороне - блок выбора субоптимальной частоты 4 и последовательно соединенные широкополосный приемник 5, демодулятор 6 широкополосного многочастотного сигнала и декодер команд 7, при этом, выход ш,ирокополосного приемника 5 подключен к входу блока выбора субоптимальной частоты 4, блок синхронного управления 8 и последовательно соединенные формирователь 9 импульсов зондирования и коммутатор 10, выхоДкоторого соединен с входом модулятора 2 широкополосного сигнала, а второй и третий входы коммутатора соединены с выходами кодера команд I, к управляющему входу которого подключен первый выход блока синхронного управления 8, второй выход которого соединен с управляющим входом широкополосного передатчика 3, а дополнительный выход кодера команд 1 подключен к входу формирователя 9 импульсов зондирования, второй вход которого соединен с вторым входом коммутатора 10, на приемной стороне блок синхронного управления 11 и последовательно соединенные блок измерения многолучевости 12 и блок обработки результатов 13, к управляющему входу которого подключен первый выход блока синхронного управления 11, второй и третий выходы которого соединены соответственно с управляющими входами широкополосного приемника 5 и блока выбора Субоптимальной частоты 4, ВЫХОД которого подключен к первому блока измерения многолучевости 12, второй вхоД которого соединен с выходом декодера команд 7.
Устройство для определения оптимальных рабочих частот работает следующим образом.
По сигналу с блока синхронного управления передачи 8 кодер 1 формирует комбинацию, признака зондирования, которая через коммутатор 10 поступает на модулятор 2 широкополосного многочастотного сигнала.
В модуляторе 2 осуществляется формирование широкополосного многочастотного сигнала и модуляция по определенному закону (например, фазо-кодовая манипуляция) Сформированный сигнал с выхода модулятора 2 поступает на вход широкополосного передатчика 3 и излучается.
После передачи последнего символа комбинации признака зондирования с выхода кодера 1 на формирователь 9 и коммутатор 10 поступает , по которому разрешается работа формирователя 9, а его выход подключается через коммутатор 10 к входу модулятора 2.
Формирователь 9 вырабатывает последовательность зондирующих импульсов синхронно с тактовой последовательностью кодера I. Период следования зондируюших импульсов выбирается превышающим величину возможных задержек отраженных сигналов, а длительлость их выбирается из условия получения требуемого разрешения структуры многолучевости. Последовательность импульсов с выхода формирователя 9 через коммутатор 10 и модулятор 2 также поступает на передатчик 3 и излучается.
На приемной стороне блок выбора субоптимальной частоты 4 измеряет уровни помех всех частотных составляющих многочастотного сигнала на выходе широкополосного приемника 5, а в процессе передачи (приема) комбинации признака зондирования - и уровни сигналов на этих составляющих. Затем по сигналу с блока синхронного управления 11 блок выбора субоптимальной частоты 4 анализирует результаты измерений, выбирает субоптимальную частоту приема. Оптимальную по определенному критерию, например, по максимальному отношению сигнал/помеха и подключает на эту частоту блок измерения многолучевости 12.
Принятый сигнал комбинации признака зондирования с выхода приемника 5 поступает на демодулятор 6 широкополосного многочастотного сигнала, где подвергается когерентной обработке «свертке. Полученная комбинация признака зондирования с выхода демодулятора 6 поступает на деко дер 7, который при выделении «своей команды формирует импульс по последнему символу комбинации, поступающий на блок измерения многолучевости 12 и разрешающий его работу.
Блок измерения многолучевости 12 осуществляет измерение параметров многолучевости (количество лучей, задержка между ними и амплитуда сигналов) по параметрам потока отраженных импульсов - откликов, поступающих с выхода приемника 5, через блок 4 на выбранной субоптимальной частоте. Результаты измерения поступают на блок обработки результатов 13, где они запоминаются и обрабатываются по определенному алгоритму.
После окончания измерений на одном пакете частот блок синхронного управления передачи 8 и блок синхронного управления приема И, переключают соответственно передатчик 3 и приемник 5 на новый пакет частот и по сигналу с блока синхронного управления на кодер 1 начинается цикл измерений на новом пакете, аналогично рассмотренному.
По окончании циклов из.мерений на всех частота); назначенного диапазона блок синхронного управления приема 1 выдает сигнал, по которому с блока обработки результатов 13 выдаются определенные по результатам обработки измерений оптимальные рабочие частоты для различных режимов передачи информации в зависимости от величины задержки и уровней отдельных лучей.
Таким образом, данное устройство позволяет повысить точность определения оптимальных рабочих частот в условиях м-ноголучевости, за счет того, что использование щирокополосного многочастотного сигнала позволяет с высокой надежностью и скоростью передавать комбинацию признака зондирования и зондирующие импульсы, а дещифрирование комбинации признака зондирования свидетельствует о приеме сигналов «своего зондирующего передатчика и позволяет с высокой точностью определить момент поступления отраженных импульсов, обеспечивая необходимую достоверность селекции отраженных сигналов.
Кроме того предварительный выбор субоптимальной частоты приема и измерение на ней потока отраженных сигналов обеспечивает достаточную точность определения параметров многолучевости при воздействии сосредоточенных помех.
Формула изобретения
Устройство для определения оптимальных рабочих частот, содержащее на передающей стороне кодер команд и последователь, но соединенные модулятор щирокополосного многочастотного сигнала и щирокополосный передатчик, а на приемной стороне - блок выбора субоптимальной частоты и последовательно соединенные щирокополосный приемник, демодулятор щирокополосного многочастотного сигнала и декодер команд, при этом выход щирокополосного приемника подключен к входу блока выбора субоптимальной частоты, отличающееся тем, что, с целью повыщения точности определения оптимальных рабочих частот в условиях многолучевости, на передающей стороне введены блок синхронного управления и последовательно соединенные формирователь импульсов зондирования и коммутатор, выход которого соединен с входом модулятора щирокополосного сигнала, а второй и третий входы коммутатора соединены с выходами кодера команд, к управляющему входу которого подключен первый выход блока синхронного управления, второй выход которого соединен с управляющим входом щирокололосного передатчика, а дополнительный выход кодера команд подключен к входу формирователя импульсов зондирования, второй вход которого соединен с вторым входом коммутатора, на приемной стороне введены блок синхронного управления и последовательно соединенные блок измерения многолучевости и блок обработки результатов, к управляющему входу которого подключен первый выход блока синхронного управления, второй и третий выходы которого соединены соответственно с управляющими входами щирокополосного приемника и блока выбора субоптимальной частоты, выход которого подключен к первому входу блока измерения
многолучевости, второй вход которого соединен с выходом декодера команд. .
Источники информации, принятые во внимание при экспертизе
1. Авторское свидетельство СССР 5 № 291347, кл. Н 04 В 3/04, 1969.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для определения оптимальных рабочих частот | 1980 |
|
SU926779A2 |
| Адаптивная радиолиния | 1979 |
|
SU801279A1 |
| Ретранслятор системы связи | 1982 |
|
SU1081808A1 |
| СИСТЕМА ДУПЛЕКСНОЙ ВЫСОКОСКОРОСТНОЙ КОРОТКОВОЛНОВОЙ РАДИОСВЯЗИ | 2013 |
|
RU2553091C2 |
| ЛИНИЯ ПЕРЕДАЧИ ДИСКРЕТНОЙ ИНФОРМАЦИИ ПО ТРАКТАМ С ПЕРЕМЕННЫМИ ПАРАМЕТРАМИ | 1971 |
|
SU429546A1 |
| РАДИОСТАНЦИЯ | 2004 |
|
RU2280950C2 |
| РАДИОМОДЕМ | 2024 |
|
RU2830959C1 |
| Устройство передачи и приема информации | 1982 |
|
SU1083382A1 |
| СПОСОБ РАДИОСВЯЗИ С ТЕХНОЛОГИЕЙ MIMO И ПСЕВДОСЛУЧАЙНОЙ ПЕРЕСТРОЙКОЙ РАБОЧИХ ЧАСТОТ | 2023 |
|
RU2804518C1 |
| СПОСОБ РАЗНЕСЕННОГО ПРИЕМА СИГНАЛА, ПЕРЕДАННОГО ПО МНОГОЛУЧЕВОМУ КАНАЛУ, И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2021 |
|
RU2779925C1 |