(54) УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ОПТИМАЛЬНЫХ РАБОЧИХ ЧАСТОТ
Изобретение относится к радиосвязи, может использоваться для определения рабочих частот и скорости передачи дискретной информашш в адаптивных системах связи с зондированием.
По основному авт. св. № 651488 известно устройство дпя определения рабочих частот, содержащее на переда1ошей стороне кодер команд и последовательно соединенные модулятор широкополосного сигнала, широкополосный передатчик, а на приемной стороне -. блок выбора субоптимальной частоты и послед ,ельно соединенные широкополосный приемник, демодулятор широкополосного многочастотного сигнала и декодер команд, при этом выход широкополосного приемника подключен к входу блока выбора субоптимальной частоты, а также на передающей стороне 6jioK синхронного управления и последовательно соединенные формирователь импульсов зондирования и коммутатор, выход которого сое-
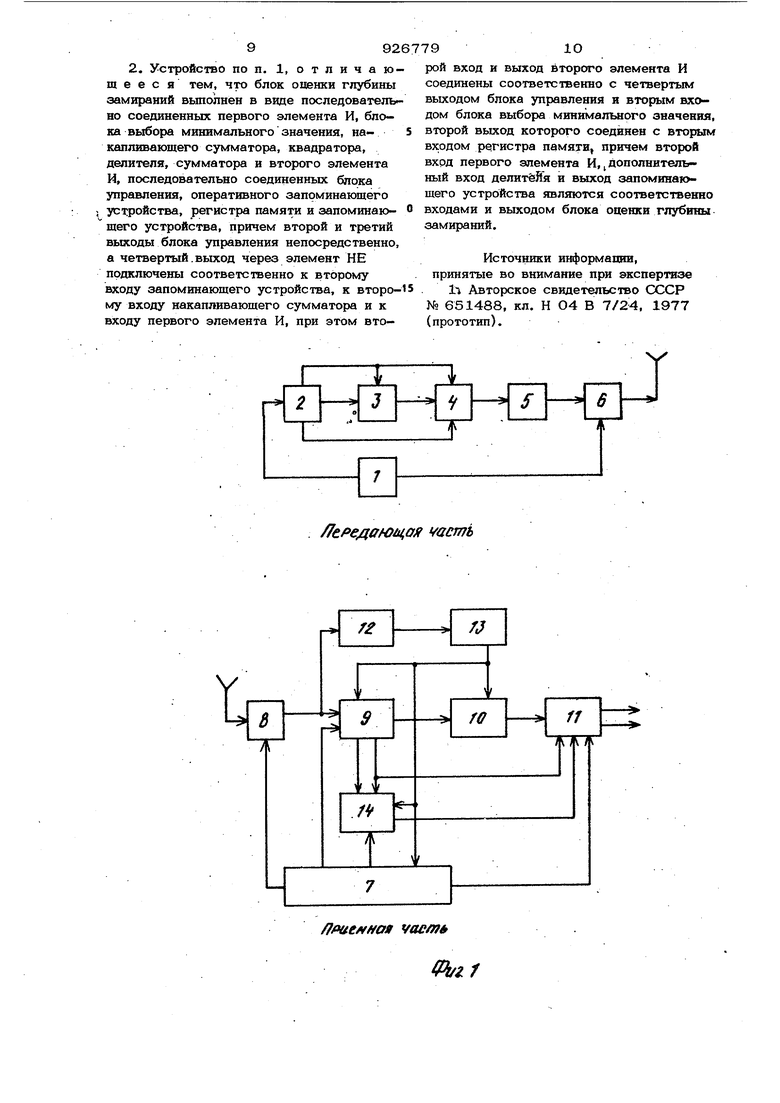
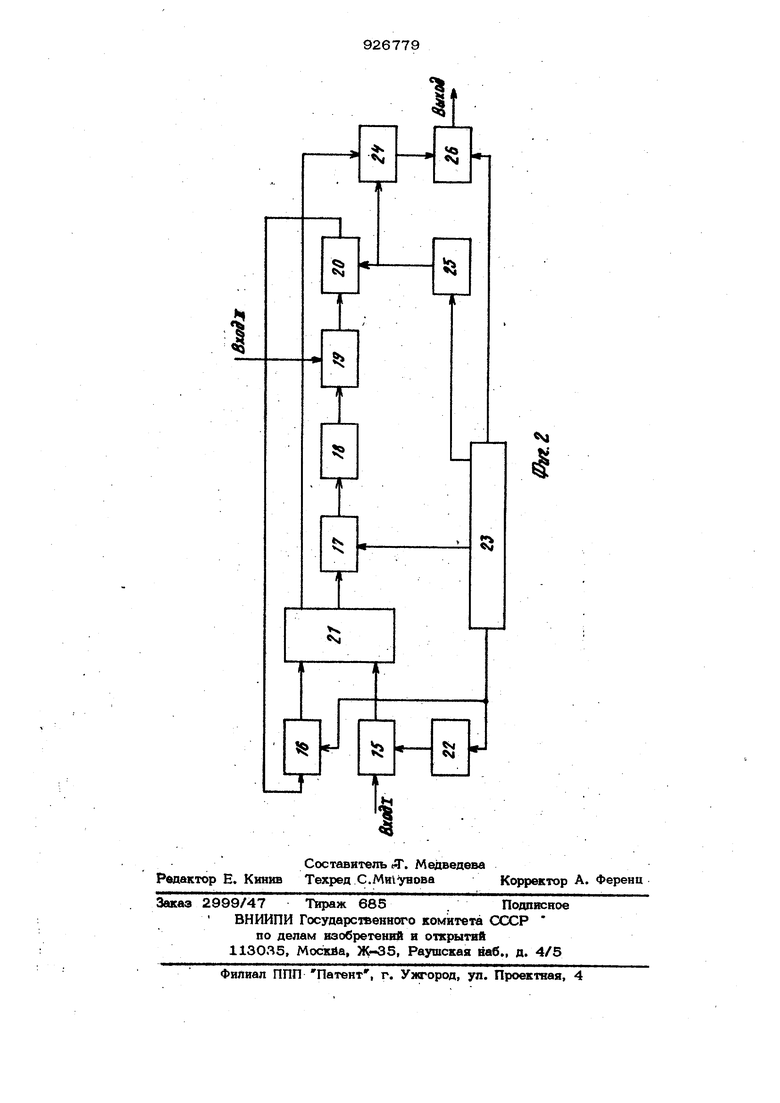
динен с входом модулятора широкополсх;ного сигнала, а второй и третий входы коммутатора соединены с выходами кодера команд, к управляющему входу которого подключен первый выход блока синхронного управления, второй выход которого соединен с управляющим входом широкополосного передатчика, а дополнительный выход кодера команд подключен к входу формирователя импульсов зондирования, второй вход .-которого соединен с вторым входом коммутатора, а также на приемной стороне блок синхронного управления и последовательно соединенные блок измерения многолучевости и блок обработки результатов, к управляющему входу которого подклк чен первый выход блока синхронного управления, второй и третий выходы которого, соединены соответственно с управляющими входами широкополосного приемника и блока выбора субоптимальной частоты, выход которого подключен к первому входу блока измерения многолучевоети, второй вход которого соединен с выходом декодера команд ГИ . Однако известное устройство имеет недостаточную точность выбора оптималь ных рабочих частот., Цель изобретения - .повьпнение точ-. ности Для этого в устройство для опредепеНИ15 оптимальных рабочих частот введен на приемной стороне блок оценки глубинь замираний, выход которого подключен к второму входу блока обработки результатов, первый, второй, третий, четвертый входы которого соединены соответственно с четвертым выходом блока синхронного управления, с вторым выходом блока выбора субоптимальной частоты, с входом блока синхронного управления, с третьим выходом блока выбора субоптимальной частоты и третьим входом блока обработки результатов, причем, выход декодера команд подключен соответственно к третьему входу блока выбора субрптимальной частоты и к входу блока синхронного управления. Причем, блок оценки глубины замираний выполнен в виде последовательно соединенных первого элемента И, блока выбора минимального значения, накапливающего сумматора, квадратора, делителя, сумматора и второго элемента И, последовательно соединенных блока управления, оперативного запоминающего ycTpojicTBa, регистра памяти и запоминающего устройства, причем второй и третий выходы блока управления непосредственно, а четвертый выход через элемент НЕ подключены соответственно к второму входу запоминающего устройства, к второму входу накапливающего сумматора и к входу первого элемента И при этом второй вход и выход второго элемента И соединены соответственно с четвертым выходом блока управления и вторым входом блока выбора минимального значения, второй выход которого соединен с вторым входом регистра памяти, причем второй вход первого элемента И, дополнительный вход делителя и выход запоминающего устройства являются соответственно входами и вько- дом блока оценки глубины замираний. На фиг. 1 представлена структурная электрическая схема устройства ; на фиг, 2 - структурная электрическая схема блока оценки глубиш) замираний. Устройство для определения оптималь ных рабочих частот содержит на пере дающей стороне блок 1 синхронного управления, кодер 2 команд, формирователь 3 импульсов зондирования, коммутатор 4, модулятор 5 широкополосного сигнала, широкополосньтй передатчик 6, на приемной стороне блок 7 синхронного управления, широкополоснвхй приемник 8, блок 9 выбора субоптимальной частоты, блок 1О измерения многолучевое ти, блок 11 обработки результатов, демодулятор 12 широкополосного многочастотного сигнала, декодер 13 команд, блок оценки 14 глубины замираний. Причем блок оценки 14 глубины замираний содержит элементы И 15 и 16, накапливающий сумматор 17, квадратор 18, делитель 19, сумматор 2О, блок 21 выбора минимального значения, элемент НЕ 22, блок 23 управления, регистр 24 памяти, оперативное запоминающее устройство (ОЗУ) 25i запоминайищее устройство (ЗУ) 26, Устройство для определения оптимальных рабочих частот (фиг. 1) работает следующим образом. В сеансе,зондирования на каждой из частот зондирования по сигналу с блока 1 синхронного управления кодер 2 команд формирует в течение интервала Тд, времени зондирования широкополосным непрерывным сигналом периодически повторяющуюся комбинацию признака зондирования, которая через коммутатор 4 поступает на модулятор 5 широкополосного сигнала. В модуляторе 5 осуществляется формирование непрерывного С -частотного широкополосного зондирующего сигнала и модуляции по определенному закону (например, фазо-разностная модуляция или частотная телеграфия). Сформированный сигнал с выхода модулятора 5 поступает на вход широкополосного передатчика 6 и излучается. После передачи последней комбинации признака зондирования кодер 2 команд формирует комбинацию конца зондирования широкополосным нeпpepывны сигналом, после передачи последнего символа с выхода кодера 2 команд на формирователь 3 импульсов зондирования импульсного зондирующего сигнала и коммутатор 4 поступает сигнал, по которому разрешается работа формирователя 3, а его выход подключается через коммутатор 4 к входу модулятора 5. Формирователь 3 вырабатывает последовательность зондирующих импульсов в течение интервала Т синхронно с тактовой последовательностью кодера 2. Период следования зондирующих импульсов и их длительность выбирается соответственно из условий максимального возможного запаздывания пучей отраженного от ионосферы сигнала и требуемой разрешающей способности структуры многолучевое ти. Последова- тельность импульсов с выхода формирователя 3 через коммутатор 4 и модулятор 5 поступает на передатчик 6 и излучается. На приемной стороне в течение интер вала времени Т , предшествующему интервалу Тд зондирования непрерывным тестовым сигналом, блок 9 выбора субоптимальной частоты по команде от приемного блока 7 синхронного управления Евмеряет мощность помех на пачке частот связи на выз(оде широкополосного приемника 8 в полосах частот измерения соответствующих информационной полосе частот каждой градации скорости передачи информации режимов работы/ и на В -частотных составляющих зондирующег непрерывного широкополосного сигнйла соответственно в полосах частот парпиальных частотных каналов. Затем блок 9 выбирает К из С ((с ) парциальных часто ных каналов с минимальной мощностью помех, в которых в следующий интервал Trt зондирования непрерывным тестовым сигналом измеряет среднюю по времени и по It частотным каналам мощность тестового сигнала, а также выбирает пархшальный канал с минимальной мощностью помех, на частоту которого подключается на интервале Т вход блока измерения многолучевости для измерения максимальной задержки лучей по импульс ному зондирующему сигналу. Одновремен но на интервале Тд блок 9 транслирует выборки значений огибающих сигналов Ic частотных парциальных каналов на вто-. рой.вход блока 14 оценки глубины замираний, управляемого от блока 7 синхронного управления и декодера 13 кома Управление началом интервала Тд из- мерения мощности сигнала в блоке 9 и оценки глубины замираний в блока оценки 14 осуществляется по демодулированной демодулятором 12 широкополосного сигнала и декодированной декодером 13 команд Ч омбинации признака зондирования, а концом этого интервала и началом следующего интервала Т измерения запаздывания лучей в блоке измерения 10 многолучевости соответственно по комби нации конца зондирования широкополосны непрерывным сигналом. Измеренные на интервале Т. значения средних мощностей помех для частот связи и значение 9 96 мощности сигнала на интервале Тд блок 9 выдает в конце этих интервалов соответственно помехи и сигнал на третий дополнительный вход блока обработки 11 результатов и только сигнал на четвертый вход блока 14 оценки глубины замираний, который работает следующим образом (фиг. 2). Известно, что для закона Накагами огибающей замирающего сигнала существует зависимость между квантилем Ad. порядка С( , и параметром средней мощности Д в виде XQ Ac((ivi). Независимою выборки (код) оигбак щих 1с частотных каналов на интервале Тд поступают поочередно через первый элемент И, 15, управляемый через элемент НЕ 22 блоком 23 управления на вход блока 21 выбора минимального значения. Блок 21 выбирает из каждых поступающих, например, восьми текущих независимых выборок выборку с минимальным значением и записывает ее в накапливающий сумматор 17 со сдвигом, управляемый от блока 23 управления. В накапливающем сумматоре 17 по О таким выборкам (п 2 ) определяется суммированием и сдвигом на разрядов. среднее по времени и частоте значение квантили Xq порядка О о;-1/9 , которое возводится в квадрат в квадраторе 18. АО с выхода квадратора 18 Значение 19, где по поступает на вход делителя измеренному значению Л о и мощности Q. сигнала, поступающей с блока 9 на дополнительный вход делителя 19, вычисляется делением на Ci. оценка коэффициента AdCm). Вычисленное значение коэффициента Ad (.тп) поступает на вход сумматора 2О, на дополнительный.вход которого и вход регистра 24 памяти с выхода ОЗУ 25 поступают поочередно значения коэффициентов Aa(vn), записанных в ОЗУ 25. В сумматоре 2О вычисляется поочередно разность между измеренным значением коэффициента Act(fli) и записанными в ОЗУ 25 значениями оценок коэффициента А&(т),.и значения разностей поочередно пост ттают через второй элемент И 16, на управляющий вход которого во время этого сравнения подан разрешающий сигнал от блока 23 управления, на дополнительный вход блока 21. Если предыдущее значение разности меньше текущего сравниваемого значения разности (по абсолютному значению), то вторым выходом Решение блока 21 запрещается запис в регистр 24 памяти текущего сравни9Баемого значения коэффшшента Аа(т) -. если выполняется противоположное условие, то разрешается запись текущего значения коэффициента в регистр 24, Таким образом, в регистре 24 в реауль тате сравнения записывается наиболее близкое к измеренному аппроксимирующее значение оценки АаСт), код значения которого поступает на вход Адрес ЗУ 26, Сшчшлом, поступаюшим на уп- ) равляющий вход ЗУ 26 с второго выхода блока 23 управления с выхода ЗУ 26 считывается значение коэффи1шента мно жителя d , поступающего на второй дополнительный вход блока 11 обработки результатов. В блоке 11 обработки результатов из посгугшвших ia фетий вход значений мош .ти сшнала и мощности помех формирует ся для кажцой частоты связи пачки икажаой градации скорости передачи И ;Еформации среднее отношение сигнал/помеха, кото рые корректируются в соответствии , со значением коэ |1фициента d.-, , учитывающего глубину замираний сигнала. По принятой 1Ш приемной стороне и декодирован ной декодером 13 команд комбинации кон .да зондирования широкополосным непрерывным сигналом блок измерения 10 мно голучевости в течение интервала времени Ti измеряет максимальную задержку луче по потоку отраженных импульсов, посту- пающих с выхода широкополосного прием- шжа 8 через блок 9 на частоте с мини- мальнйм уровнем помех.на вход блока 10 1-1Эмерения многолучевоети, По измеренным пороговым значениям максимального запаздывания лучей в блоке 11 обработки результатов вычисляет™ ся максимальная допустимая для пачки частот связи пороговая скорость передачи ит1формаиии. Затем скорректированные значения Отношений сигнал/помеха для скоростей передачи информации меньших пороговой скорости, определенной по пороговому максимальному запаздыванию лучей, сравниваются с пороговыми значениями сипгнал/помеха и выбирается час тота связи с максимальной скоростью передачи информации, удовлетворяющая обоим пороговым значениям, которая запоминается. После окончания измерения на одном пакете частот блок 1 и блок 7 переключают соответственно широкополос ный передатчик 6 и широкополосный приемник 8 на новый пакет частот, и по сигналу с блока 1 на кодер 2 начинается цикл измерений на новом пакете частот, аналогично рассмотренному. По окон 9. S чании циклов измерения на всех-частотах связи блок 7 синхронного управления выдает на управляющий вход 11 обработки результатов сигнал, по которому в блоке1 выбирается рабочая частота с максимальной из-всех максимальных дпя каждого пакета частот- скоростью. Значение рабочей частоты и скорости передачи ит формации на этой частоте поступает на выход блока 11 обработки результатов. В интервалах между сеансами зондирования устройство периодически айализирует на всех частотах связи помеховую обстановку н в блоке 11 обработки результатов периодически обновляется информация о помехах, с учетом которой перкоцически повторяется выбор рабочей частоты и скорости. Предлагаемое устройстзво позволит по- высить точность выбора в условиях многолучевости сигнала и нестационарности по времени и частоте помех за счет учета при выборе глубины общих замираний огибающей сигнала и измерения помех на частотах связи в информационной полосе каждой градации скорости передачи информации. Кроме того, измерение средней по времени и частоте глубины замираний на лучших по уровню помех парциальных каналах позволяет сократить время анализа и повысить точность оценки глубийы замираний сигнала. Испольчвованиё предлагаемого устройства в составе адаптивной радиолинии позволит повысить надежность связи, пропускную способность адаптивной радиолинии. Формула изобретения 1. Устройство для определения оптимальных рабочих частот по авт. св. № 651488, отличающееся тем, что, с цепью повышения точности, на приемной стороне введен блок оценки глубины замираний, выход которого подключен к второму входу блока обработки результатов, первый, второй, третий, четвертый входы которого соединены соот ветственно с четвертым выходом блока синхронного управления, с вторым выходом блока выбора субоптимальной , с входом блока синхронного управ-ления, с третьим выходом блока выбора субоптимальной частоты и третьим входом блока обработки результатов, причем выход декодера команд подключен соогветственно к входу блока выбора субоптимальной частоты и к входу блока синхронного управления.
2. Устройство по п. 1, отличающееся тем, что блок оценки глубины замираний вьтолнен в ввде последовательно соединенных первого элемента И, блока выбора минимального значения, на- 5 капливающего сумматора, квадратора, делителя, сумматора и второго элемента И, последовательно соединенных блока управления, оперативного запоминающего устройства, регистра памяти и запоминаю- О щего устройства, причем второй и третий выходы блока управления непосредственно, а четвертый.выход через элемент НЕ подключены соответственно к второму входу запоминающего устройства, к второ-15 му входу накапливающего сумматора и к входу первого элемента И, при этом второй вход и выход бторого элемента И соединены соответственно с четвертым выходом блока управления и вторым входом блока выбора минималглого значения, второй выход которого соединен с вторым входом регистра памяти причем второй вход первого элемента И, j дополнительный вход делитёйя и выход запоминаю щего устройства являются соответственно входами и выходом блока оценки глубигал замираний.
Источники информашга, принятые во внимание при экспертизе
li Авторское свидетельство СССР № 651488, кл. Н 04 В 7/24, 1977 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для определения оптимальных рабочих частот | 1977 |
|
SU651488A1 |
| Адаптивная радиолиния | 1979 |
|
SU801279A1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ОПТИМАЛЬНЫХ РАБОЧИХ ЧАСТОТ ИОНОСФЕРНОГО РАДИОКАНАЛА | 2009 |
|
RU2394371C1 |
| АДАПТИВНАЯ СИСТЕМА РАДИОСВЯЗИ | 2006 |
|
RU2325759C1 |
| Адаптивная система радиосвязи | 1975 |
|
SU562928A1 |
| Система автоматического управления декаметровой радиосвязью | 2022 |
|
RU2800643C1 |
| РАДИОМОДЕМ | 2024 |
|
RU2830959C1 |
| АДАПТИВНАЯ СИСТЕМА РАДИОСВЯЗИ | 2011 |
|
RU2474960C2 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ПЕРЕДАЧИ ЦИФРОВЫХ ДАННЫХ С ПЕРЕМЕННОЙ СКОРОСТЬЮ ПЕРЕДАЧИ | 1994 |
|
RU2266623C2 |
| СПОСОБ ПЕРЕКЛЮЧЕНИЯ БАЗОВОЙ СТАНЦИИ В СОТОВЫХ СИСТЕМАХ РАДИОСВЯЗИ С КОДОВЫМ РАЗДЕЛЕНИЕМ КАНАЛОВ, СПОСОБ ОЦЕНКИ ЧАСТОТЫ ЗАМИРАНИЙ СИГНАЛА В СРЕДЕ РАСПРОСТРАНЕНИЯ В СИСТЕМАХ РАДИОСВЯЗИ С ЗАМКНУТОЙ ПЕТЛЕЙ РЕГУЛИРОВКИ МОЩНОСТИ ПОДВИЖНОЙ СТАНЦИИ И ПРИЕМНАЯ АППАРАТУРА БАЗОВОЙ СТАНЦИИ (ВАРИАНТЫ) | 1998 |
|
RU2137314C1 |
/ е едаюцоя i/асть
fPt/l1
