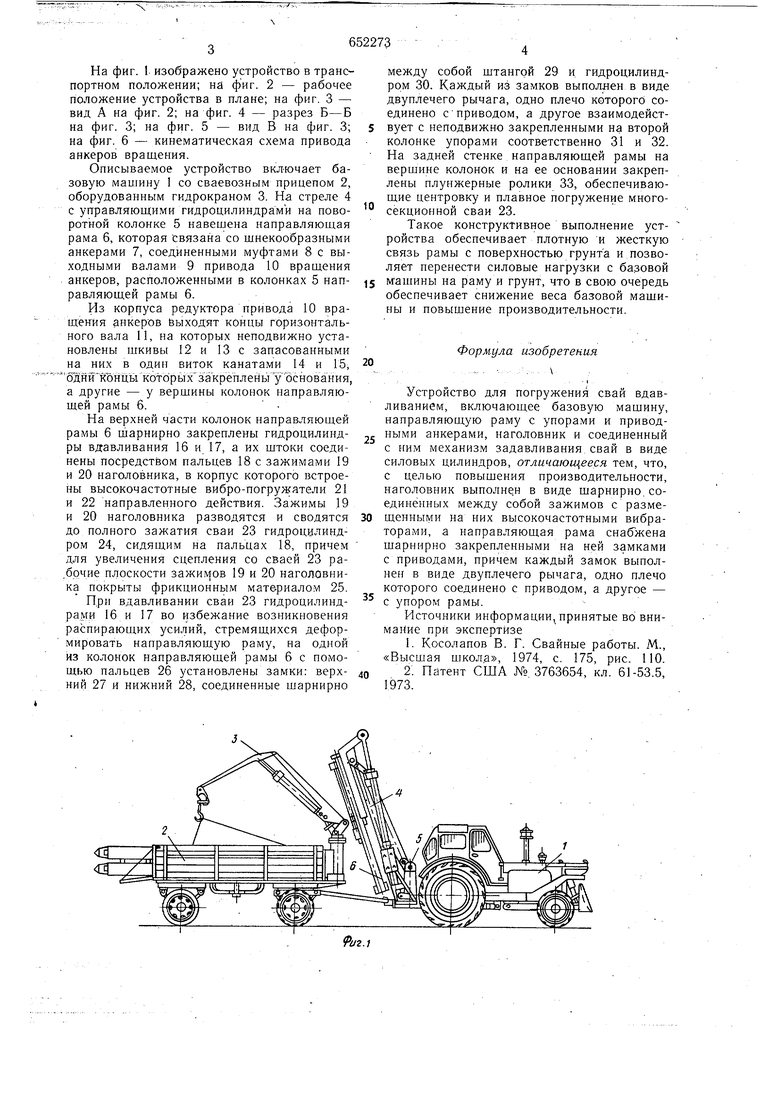
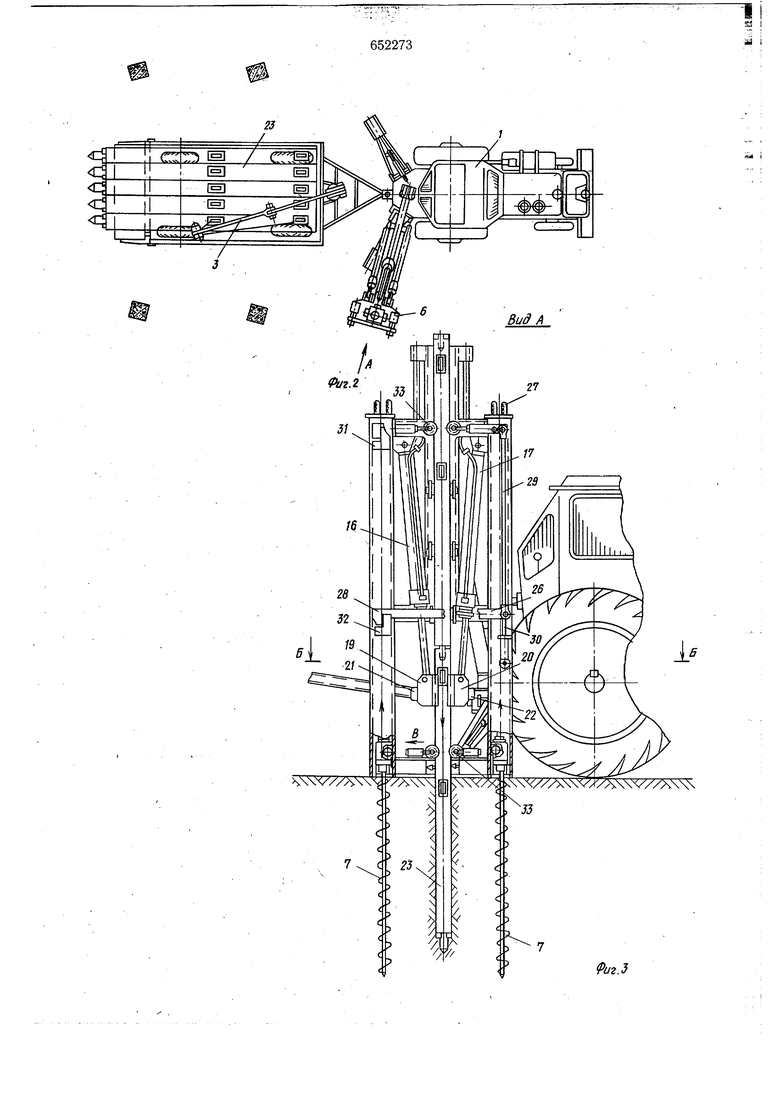
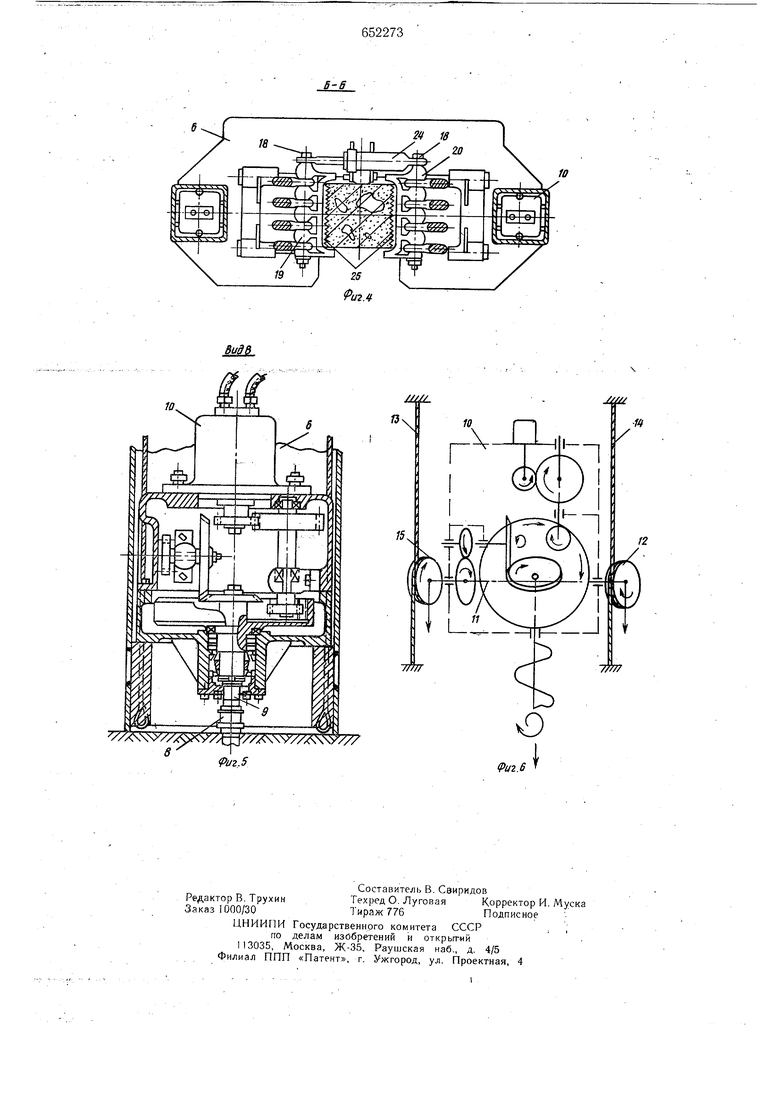
2: На фиг. 1 изображено устройство в транспортном положении; на фиг. 2 - рабочее положение устройства в плане; на фиг. 3 - вид А на фиг. 2; на фиг. 4 - разрез Б-Б на фиг. 3; на фиг. 5 - вид В на фиг. 3; на фиг. 6 - кинематическая схема привода анкеров вращения. Описываемое устройство вкл-ючает базовую машину 1 со сваевозным прицепом 2, оборудованным гидрокраном 3. На стреле 4 с управляющими гидроцилиндрами на поворотной колонке 5 навещена направляющая рама 6, которая связана со шнекообразными анкерами 7, соединенными муфтами 8 с выходными валами 9 привода 10 вращения анкеров, расположенными в колонках 5 направляющей рамы 6. Из корпуса редуктора привода 10 вращекия анкеров быходят концы горизонтального вала 11, на которых неподвижно установлены шкивы 12 и 13 с запасованными на них в один виток канатами 14 и 15, бднйконцыкотбрйх закреплены У основания, а другие - у вершины колонок направляющей рамы 6. На верхней части колонок направляющей рамы 6 щарнирно закреплены гидроцилиндры вдавливания 16 и 17, а их штоки соединены посредством пальцев 18 с зажимами 19 и 20 наголовника, в корпус которого встроены высокочастотные вибро-погружатели 21 и 22 направленного действия. Зажимы 19 и 20 наголовника разводятся и сводятся до полного зажатия сваи 23 гидроцулиндром 24, сидящим на пальцах 18, причем для увеличения сцепления со сваей 23 ра.брчие плоскости зажимов 19 и 20 наголовника покрыты фрикционным материалом 25. При вдавливании сваи 23 гидроцилиндрами 16 и 17 во избежание возникновения распирающих усилий, стремящихся деформировать направляющую раму, на одной из колонок направляющей рамы 6 с помощью пальцев 26 установлены замки: верхНИИ 27 и нижний 28, соединенные шарнирно между собой штангой 29 и гидроцилиндPQM 30. Каждый из замков выполлен в виде двуплечего рычага, одно плечо которого соединено сприводом, а другое взаимодействует с неподвижно закрепленными на второй колонке упорами соответственно 31 и 32. На задней стенке направляющей рамы на вершине колонок и на ее основании закреплены плунжерные ролики 33, обеспечивающие центровку и плавное погружение многосекционной сваи 23. Такое конструктивное выполнение устройства обеспечивает плотную и жесткую связь рамы с поверхностью грунта и позволяет перенести силовые нагрузки с базовой машины на раму и грунт, что в свою очередь обеспечивает снижение веса базовой мащины и повышение производительности. Формула изобретения Устройство для погружения свай вдавливанием, включающее базовую мащину, направляющую раму с упорами и приводными анкерами, наголовник и соединенный с ним механизм задавливания,свай в виде силовых цилиндров, отличающееся тем, что, с целью повыщения производительности, наголовник выполнен в виде шарнирно.соединённых между собой зажимов с размещенными на них высокочастотными вибраторами, а направляющая рама снабжена шарнирно закрепленными на ней замками с приводами, причем каждый замок выполнен в виде двуплечего рычага, одно плечо которого соединено с приводом, а другое - с упором рамы. Источники информации принятые во внимание при экспертизе 1.Косолапов В. Г. Свайные работы. М., «Высшая школд, 1974, с. 175, рис. 110. 2.Патент США М 3763654, кл. 61-53.5, 1973.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для виброзадавливания в грунт труб | 1980 |
|
SU937614A1 |
| УСТРОЙСТВО ДЛЯ ПОГРУЖЕНИЯ СВАЙ | 2003 |
|
RU2250306C1 |
| Устройство для погружения свай | 1980 |
|
SU920109A1 |
| УСТАНОВКА ДЛЯ ВИБРОВДАВЛИВАНИЯ СВАЙ В ГРУНТ | 1999 |
|
RU2158803C2 |
| СПОСОБ СОЗДАНИЯ ШПУНТОВОЙ СТЕНКИ КОТЛОВАНА НА БОЛОТАХ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1996 |
|
RU2122071C1 |
| Установка для погружения свай в грунт | 1978 |
|
SU734346A1 |
| ВСССОЮЗИлЯП ДТ- '- Ч^*]- |?г| I i,:^, tsa | 1973 |
|
SU372320A1 |
| УСТРОЙСТВО ДЛЯ ПОГРУЖЕНИЯ СВАЙ | 2003 |
|
RU2248431C1 |
| МАШИНА ДЛЯ ПОГРУЖЕНИЯ В ГРУНТ ЭЛЕМЕНТОВ ТИПА ВИНТОВЫХ СВАЙ, АНКЕРОВ | 1969 |
|
SU251465A1 |
| Установка для погружения свай | 1978 |
|
SU751904A2 |
v x NSX/X cy ;t3
